基于欧姆龙可编程序控制器的6层立体车库设计
Zhuoran Zhang 电气工程 武汉理工大学 武汉,中国
电子邮件:Harry zzr@126.com
Zhe Mao, Hailing Wan 电气工程 武汉理工大学 武汉,中国
电子邮件:maozhe998@sina.com
摘要:
随着现代社会的快速发展,许多城市的车辆数量正在一直以指数的速度快速增加,特别是私家车。这些情况对这些城市交通和停车造成了巨大的压力。这篇文章主要内容是关注立体车库的整个结构,运行程序和电气系统的设计等方面,其中包括硬件方案的设计思路,以及提升立体车库整体性能。这不仅将能缩短立体车库的开发周期,也促进停车场向集中化和自动化方向发展,对立体车库设计有一定的参考价值。
关键词:立体车库,欧姆龙PLC,设计
停车位不足是导致城市经济和交通的发展放缓的主要原因之一,而传统车库的一直使用是导致停车位不足的重要因素。在一个社区中停车位和居民家庭比例约为1:1,也就是一个家庭中至少有一个停车位,而为了解决这一矛盾而使用宝贵的商业用地是不可取的。在停车场中立体机械车库的主要优势就是相同车位的停车场需要的占地面积较少,这一优势已经逐步在我们面前展现出来。相比与传统的地下停车场车库,立体车库有更多的优势。首先,立体车库可以节省更多的占地面积。以传统的方法停车的停车场必须考虑车辆的行驶轨迹问题,而平均一辆车需要至少40平方米进行停车操作。如果我们考虑使用地是多层的立体车库(6层),有可能停放在该区域的车辆可达13辆,而占地面积仅为50平方米,这将节省大量宝贵的土地资源和土地建设成本。同时,立体车库能保证他人和汽车的安全。如果在车库有任何人活动或汽车没有完全停止,电气设备的控制系统将无法正常运行。这意味着,在规模的机械车库管理时可实现人车分离,这使得立体车库更自动化,特别是对于地下车库。安装这种车库的地下停车场将省去大面积的照明系统,因此它的出现可以节约大量的能源并可以保护周边的环境免遭破坏。
Ⅰ.立体车库的背景分类与实现
A.立体车库的分类
根据现在立体车库的发展,可将它分为巷道堆垛式立体车库,垂直升降式立体车库,垂直循环式式立体车库,圆形水平循环式立体车库等。立体车库的概念是从自动化的物料传送系统演变而来。[3]立体车库的使用目的是为了解决停车难的问题,尤其在发达的城市中,这是为了使有限的区域内停放更多的车辆,以节省发达城市的土地资源的静态交通管理系统。本文提出了一个简单的方式来设计基于欧姆龙可编程序控制器CP1H的立体升降车库,这可以扩展到解决相关项目的立体车库设计难题。
B.简要介绍了升降横移立体车库
模块化设计在进口的升降横动立体车库设计中是很重要的。它可以设计为两到五层或半地下型车库,车位的数目可以从几十到几百个。这种车库合适于地上和地下建造车库的特点,它的优点可概括为占用土地少,操作简单,结构配置灵活,建设成本更低,装饰防火和建设周期短,安全方便存储汽车;使操作更为顺畅,降低运行时的噪音。[4]这也是适用于商业,办公室和住宅的使用。立体车库的安全设备主要是光电传感器,限制位移保护和紧急开关等。
C.整个系统的框架
由图l表示,除了中央控制器PLC,立体车库系统还可以被分为三个部分:一,机械系统,它包括柱,梁,承载板,车架,吊钩等。二,电动系统,这部分是本文的核心,它控制整个系统的正常运作。三, 触摸面板,它是用户和系统交换消息的设备,用户不仅操作该系统,还可以在故障的情况下让操作员输入命令或进入调试模式。
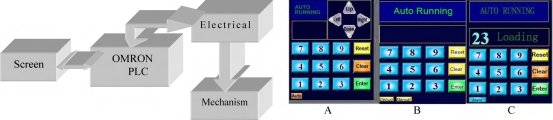
图1。系统的结构 图2。 触摸屏(自动运行和手动)
•该系统的主要硬件
我们主要使用欧姆龙可编程序控制器CPH1,在考虑控制要求和硬件成本的问题上,我们采用CP1H-X40DR-A PLC的编程方法可使用梯形图或ST指令列表。指令的长度是1到7的步骤指令,每个I/O继电器有1600个端口,使用USB 1.1接口进行通信。显示部分,我们使用屏幕型号是WEINVIEWMT6056i系列型号,屏幕材质为TFT,尺寸大小为5.6英寸,使用USB2.0端口,屏幕支持的分辨率为320X234,下载程序的CPU的频率是400 MHz,运行内存为128RAM。
D.该系统的结构和功能
机械零件中与电气系统合作的是承载板、挂钩和链条。各层上除了7层以外有六个插槽,一共有37个插槽、在每一个阶层上都有一个空的位置的目的是拥有足够的空间来使装载板移动。承载板的一层设计用来来回移动,同样顶楼承载板也应该仅用来提升。另一个承载板在这些楼层中是为了提升和横移。通过这种方式,该系统可以实现节约和降低其中6层中的任何空位。
此外,该系统还具有的触摸屏系统,其中系统还可以在自动运行和手动调试模式之间切换。
在自动运行模式下,它可以让用户选择某个位置的停车位完成保存的行为,同时还可以监测系统的运行。 (系统显示绿字“系统运行”,表示系统在自动模式下无故障,可正常运行)。当系统发生故障时,系统检测后并在屏幕上显示为闪烁的黄色和故障代码,用红色背景,借助故障代码,专业的操作员可以识别故障代码并及时准确地消除故障。上述考虑情况现在越来越多的部门在手动调试的模式进行停车,以排除非专业人士进入该模式的机会,所以在此之前,输入模式并有一个密码验证,该序密码可以由自己设定。这将保护系统免受潜在的危险,方便维修人员维修。
图2是曲线图,系统自动运行和手动调试。
II.对电气系统的分类
强电系统
高效的动力系统包括电源系统,保护系统和驱动机制,这就是电机。安装XJ3-D对早期的电源配线,可以用来保护的三相的相序电压,使保证电机的右旋转。此外,这也使每些层上使用的电动机拥有相同的三相电压。
电机的布置
在第一层上有6个横动电机,在2到5层有6个横动电机,因此在2到5层有起重电机,顶层部分只有7台起重电机。布置完成后,对每个电机进行标记。例如,电动机在第二层的第三个时隙时,我们把它标记为“23”,电机前的继电器命名KM23。在此系列连接所有的电动机都进行热保护,任何电机的问题都会导致系统出现问题。在这运行方式下,它具有的系统稳定性并没有受影响,但这也可以使整个系统的建造成本大大降低了。同时,维修人员可以更容易地找到问题。(我们需要做的是将每个热保护开关一个一个地连接)。
弱电系统
弱电系统也就是控制系统,主要包括PLC模块和5个扩展模块和传感器模块。如下图所示,右边是输入部分,电压为直流24V,在左侧为输出部分,电压为交流220V,并把他们连接起来。 这些设备的控制要求与整个系统的功能有密切的关系。在上述的曲线图中,上述的保护设备安装紧急开关,旁边触摸面板安装有紧急触发装置,按下后系统将迅速停止。正面和背面安装有光电传感器,这是用于检测人或不明物体闯入自动车库系统,如果发生这种情况时,系统将会停止然后响应光电响应失败,我们的目标是保护人和车辆的安全。相序保护器的作用是在电机卡死或正常启动之前过电流保护,它并于边缘交换机系列连接,主电源短路时承载板超过极限位置时,系统将切断主要电源。
限位开关,包括向上的限位开关和向下的限位开关或左右限位开关。为了更好的实现控制要求,水平限位开关都安装在每个车位时隙的两侧,而垂直极限开关安装在附加的电机链上。有必要指出的是,第一层只安装下和左右的限位开关,顶端层只安装开关,这些开关能感觉到的车位板的位置,帮助完成解除车的位置控制。钩位置传感器是确定车辆和插槽是否有无空间的装置。
输出点“00 04 05 06 07”的选择的不同,对应每个层的不同的相位,所以它也控制的电动机的旋转方向的操作或取消。
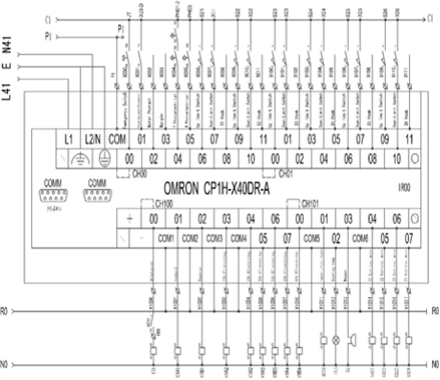
图3。 PLC模块(分部)
还有其他的4个扩展模块,可使系统拥有更多的I / O端口,图为PLC主要部分。
III. 操作步骤
A.程序的运行
根据第一层特点,它被设计为只做横向移动动作,从而使空间上层的面板有空间向下方移动。所以,其它层也是如此,这就是模块化设计。当详细研究符合要求,升降机构的运行,将承载板运行,完成保存和程序。在过程中,光电传感器将是打开的,这情况在前文解释。在图2A中,采取此条件,在这个时候“加载”灯将闪烁,直到采取过程结束为止。当我们输入“51”这个数值后,该系统将区分操作是否是通过51插槽的挂钩保留和捕获程序。然后将该消息的状态显示在屏幕上,操作者可以通过屏幕信息确认操作或取消操作。在确认后,51个承载板将等待下层承载板横向运行完成后再向下完成穿越移动。此外,一个定时器被添加到本控制模块,以排除水平限位开关的故障,导致穿越的移动时间过长的错误。如果移动的时间超过设定的时间后,系统将向操作员发出警告,并在屏幕上显示“穿越移动时间过长”,操作者可以通过屏幕检查出失败的原因,并可很快 修复。向上的限位开关是否被用来感测承载板是否停在他们的应有的位子上。若液位开关无法完成正常检测,也许是一个承载板卡在两层之间。只有做到上面所诉的内容后才停止在正确的插槽,程序才会被被激活。一个定时器设置到起重控制装置,具有相同的功能,作为定时器。电梯将该车辆运送地,释放钩子,现在的光电信号关闭,并等待为业主车辆进入。在车辆进入车库后和操作者的确认,等待该光电信号恢复后,回到其插槽的承载板向下的方式。
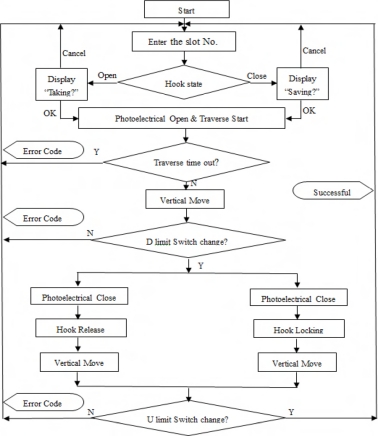
图4。 拍摄和保存过程的流程图
B. 补偿程序
补偿过程的基础是采样程序,所以他们是熟悉的,唯一的区别是挂钩的应用。
IV.软件编程和编程环境
A.软件编程环境以及编程语言
在这个系统中,我们选择了欧姆龙CX-ONE 3.0编程软件和PLC 的硬件,使用的编程的语言是经典梯形图。 在考虑立体车库跟具不同的用户安装在不同的条件和要求下进行设计,立体车库的规模应该是可以灵活进行变化,例如不同的层或插槽。为了满足用户对不同尺度车库的要求,该程序是模块化的,只需要更改的I / O端口的数目,在逻辑关系的梯形图是固定。在这种设计方式中,它不仅与系统有高度相容性,也缩短相关设计的周期,使其变得更易于调试和维修。
B.模块化程序
有条件转移被广泛用于在编程中;整个程序由不同的模块组成的,在某些条件,程序跳转到其它程序中。
如前文所述,有一个载板做升降运动或或进行穿越,在板的第一和最上面的一层。 这第五个条件可以控制所有上层槽的限位开关并将其关闭。“穿越”被激活,然后程序将会进行分析并操作,直到达到设定的条件,程序的跳跃。为解除一直与向下的运动,所以程序有向下距离的范围标准,当到达这一标准系统将运行。整个计划是用该方法运行地,而上方的通道,是唯一个可以垂直移动的通道,可以遍历模块。同样,模块固定槽槽,例如“21”。”21穿越移动而相互合作,完成控制和监测。”,“21纵”;整个系统有“紧急停止和保护”,“选择”按钮,“系统监控”和“调试”模块,而各个模块相互合作,完成控制和监测等任务。
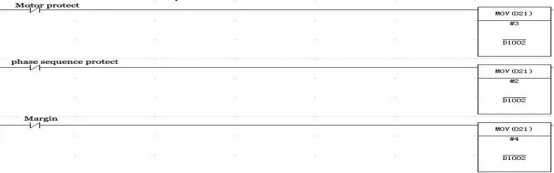
图5。 监测和显示模块(分部)
图5是部分程序的监控模块,将所有电动机与保护系列连接在一起,所以是相序保护及开关。其中的任何变化;将快速传输到屏幕,并将它显示出来。与此同时,系统的主要知识管理,系统停止。
V.一个简要的总结
本文介绍了六层电梯移动式立体车库设计方法的,在此基础上使用欧姆龙cp1hx40dr-a控制器,完成这一要求的城市立体车库车辆管理将走向自动化的方向和集中化。这种设计可用于恢复被乱停放车辆的路面的拥堵,减少抢车位的情况,保证安全。此外,它可以减少交通拥挤时间,减少车辆损伤。在此基础上,这一问题已被彻底消除,包括各种车辆乱停乱告别,并出现停车位,脏,乱、差,从而减少车辆的遗失,损坏和被盗。最后,路是归还车辆和行人,使草坪恢复为绿色空间,环境的整洁文明的现代都市生活。
开发周期已经大大缩短,设计的基础是立体车库设计的可编程序控制器。这也是一种必然的电气化,数字化和自动化进程。这一设计思想和方法可以应用到其他规模的车库和设计中的有关问题。
