摘要
移动机器人的研究开始于上个世纪60年代末期,是人工智能、机器入学、仿生学、控制理论和电子技术等多种技术学科交叉的产物。随着科技的发展和社会的进步,机器人已经走出实验室,在深海勘测、汽车制造、医学科研、能源开采、军事现代化等领域中都占有着其不可取代的位置。机器人的应用越来越广,越来越深入,各应用领域对机器人的要求也越来越高,因而移动机器人的研究逐渐成为趋势,成为高新技术应用领域的热点。 目前,对于移动机器人相关技术的研究,虽然已取得了大量的成果和突破性的进展,但是在很多关键理论和实际问题上,还有待解决和完善。因此,进行移动机器人相关技术的研究,实现移动机器人的全智能化具有非常重要的现实意义。
本文讨论的机器人环境为静态全局环境已知,通过栅格法对已知环境进行抽象,建立机器人工作空间模型,并采用粒子群算法,模拟粒子觅食行为,根据优化条件搜索出一条从指定起点到终点的最优或近似最优路径,即全局路径规划。机器人利用自身视觉传感器按照规划出的最优路径自动导航,无碰撞地移动到目标点。
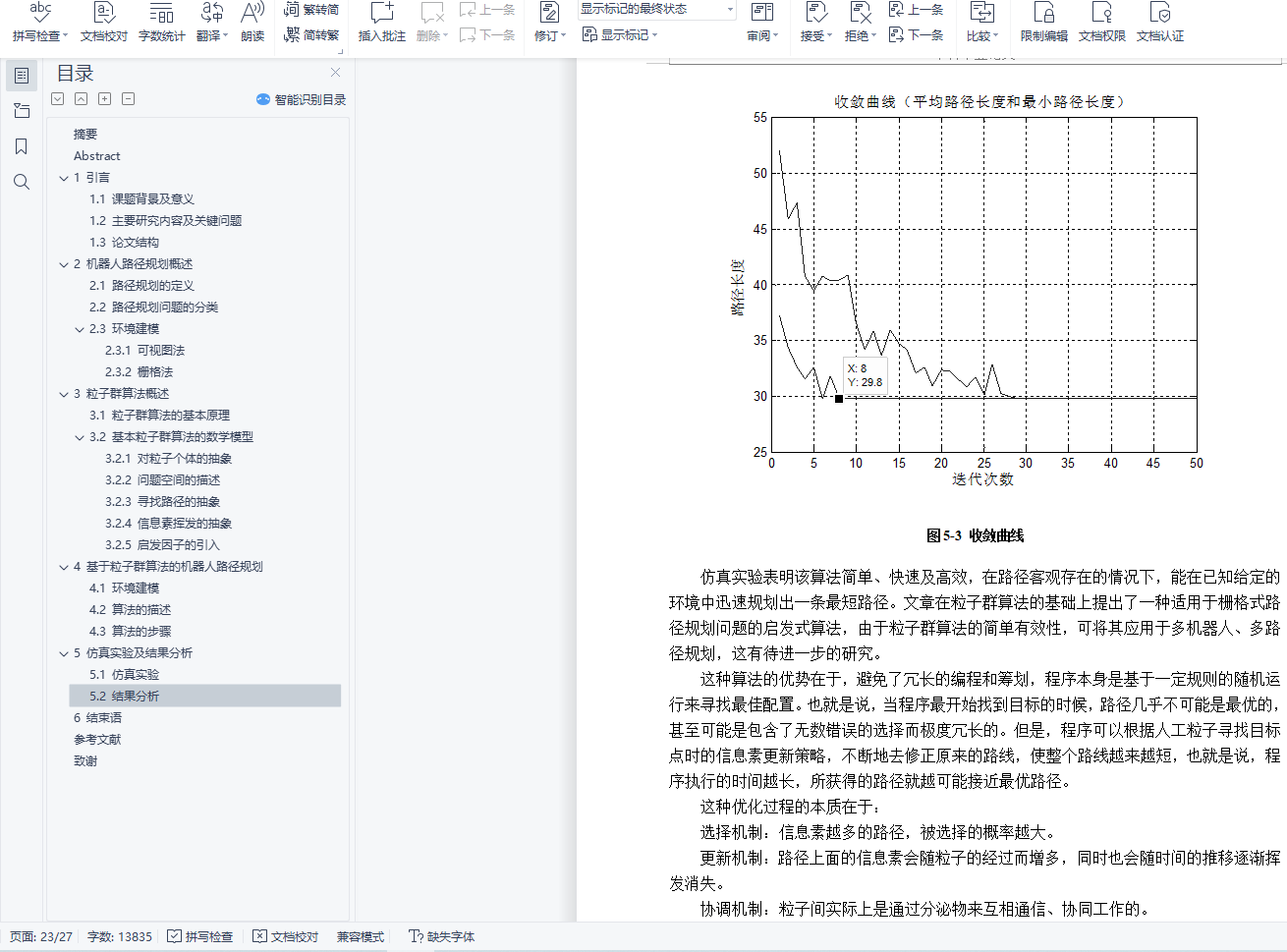
通过Matlab平台实施仿真,实验结果表明,在环境地图已知的情况下,该算法能迅速规划出较优的全局路径,并且算法简单有效。与传统的搜索算法比较,它可以避免陷入过早收敛,能实现移动机器人在较短时间内搜索到最佳路径并规避障碍。
关键词:粒子群算法;组合优化;机器人;路径规划
Abstract
Mobile robot began in the late 60s of last century, is artificial intelligence, machine school, bionics, control theory and electronic technology, and other technical disciplines cross product. With the technological development and social progress, the robot has been out of the laboratory, in the deep-sea exploration, automobile manufacturing, medical research, energy, mining, military modernization in all fields occupy an irreplaceable position. Used more and more robots, more depth, the applications of robots more and more demanding, so mobile robot become a trend, a high-tech hot spot applications. Currently, the mobile robot related technology research, though there has been a lot of achievements and breakthroughs, but in many key theoretical and practical issues remain to be resolved and improved. Therefore, for mobile robot related technology research, all intelligent mobile robots have very important practical significance.
The stoical and global environment is given, which is abstracted with grid method before the workspace model of the robot being built. With the adoption of the ant colony algorithm, the foraging behavior of ant colony is simulated. According to the optimization condition, the robot tries to find a path which is optimal or optimal-approximate path from starting point to goal, that is global path planning. The robot uses its built-in vision sensors to navigate autonomously following the optimal path which has been built, and move to the object collision-freely.
On the Matlab platform, the simulation result shows that the optimal path can be built quickly by this algorithm if the environment map is known. Also, the algorithm is simple and efficient. Comparison with traditional search algorithms―the mobile robot can find the goal within the shortest path without the collision and the stagnation.
Key words: ant colony algorithm; combination optimization; robot; path planning