适用于家庭环境的地板清洁机器人
摘 要
尽管许多清洁机已经进入市场,但是在灰尘和动态障碍物不同的家庭地板环境中,清洁机器人仍然是一个挑战。本文介绍了一种具有扫地,吸尘和擦拭功能的移动机器人,可有效清洁家用地板。机器人可以通过融合两个传感器(锐利的红外传感器和超声波声纳传感器)的信息来避免与动态障碍物发生碰撞。它可以在自主和手动操作模式下使用。在自主模式下,机器人遵循边缘检测算法以锯齿形运动。可以使用Android应用程序以手动操作模式进行控制。在实验设置中,自动和手动模式分别获得了85%和92% 的清洁效率。它可以清洁更靠近墙壁的地板清洁率≈180cm时,平均距离≈16cm2/秒。
关键词:清洁机器人;家庭环境;动态障碍物
1.介 绍
尽管市场上有许多自动清洁系统,但用于家用地板环境(具有不同类型的灰尘和动态障碍物)的清洁机器人仍然是一个未解决的问题。这是因为可用的系统主要是为无喧嚣的光滑环境(例如抛光地板)设计的,并且仅配备了真空吸尘器。全球不同的气候区域都引入了多种类型的尘埃颗粒(例如,蜘蛛网,锯末,昆虫尸体等),这需要一种有效的清洁系统,该系统具有用于家用地板环境的扫地,吸尘和擦拭能力。
该领域的许多研究人员已经做出了努力。Palacin等。[9]报告了一种清洁机器人,其清洁部分包括滚筒刷,簸盘和扫帚棍。它具有借助其十一个传感器对动态障碍物做出反应的能力。高等。[4]报道了一个清洁机器人,它仅由一个带有四个扫帚的扫地部 分组成。它具有自动和手动模式下的控制能力,并且可以对1.5 米外的障碍物做出反应。Chaple等人提到的机器人。[2]由扫除,真空清洁和擦洗机制组成。它使用光栅扫描进行路径规划算法。基于拓扑的方法用于使用十一个红外(IR)传感器与物理世界进 行交互来控制路径执行。Kaur等。[7]讨论了一种具有两个清洁部分的机器人:扫地和拖地。它可以自动和无线方式工作(使用频率为2.44 Hz,范围为50m的射频(RF)模块)以锯齿形清洁, 并可以检测1英尺距离处的障碍物。 Karthick等。[6]有一个真空清洁系统,它在离心泵的原理下工作。它遵循带有超声波传感 器的随机清洁模式以检测障碍物。托马斯等。[11]设计了一种在手动模式下工作的吸尘器机器人。蓝牙模块已用于发送和接收信 号,以通过Android应用程序操作机器人。蓝牙模块的最大距离 为100m,工作频率为2.4 GHz。红外传感器用于障碍物检测。乌曼·哈立德(Uman Khalid)等。[8]已经开发了一种机器人,该机器人具有用于控制电动机各个部分的电路,即扫掠和真空抽吸。自主运动由红外传感器数据通过障碍物控制避免技术,清洁后返回充电底座。它还具有手动控制模式, 该模式可通过带有图形用户界面的笔记本电脑远程切换。保 罗等。[10]报告了一种清洁机器人,它根据用户的方便以两 种模式工作:自动和手动;超声波传感器已被用来避免障碍。它以最小的人工干预或零人工干预执行真空抽吸,消毒和拖 把操作,并且垂直轴配有清洁刷,用于清洁墙壁。为了使整 个系统无线化,已使用CC2500 RF模块,通信距离为50m。Chavan等。[3]报告了一种使用车轮位置控制的清洁机器人。 七个超声波传感器用于障碍物检测。
尽管已经报道了许多清洁机,但是很少有清洁机,扫地机,吸尘器和擦拭机[5]。这对于不同气候区域的家用地板清洁至关重要。此外,所报道的清洁机在具有各种灰尘和动态障碍物的家用地板环境中效率不高。本文报道的工作介绍了使用Firebird V移动机器人研究平台的清洁机器人。该机器人具有三个清洁单元:清扫, 真空抽吸和擦拭。它具有可在两种模式下控制的灵活性。自主模式和手动模式。使用超声波和锐利的红外传感器的混合组合,将自主模式编程为遵循特定的清洁模式。该机器人已无线链接至Android应用程序。使用此应用程序可以在手动模式下控制机器 人。通过各种测试对所考虑的机器人进行了检查,以确定参数viz。清洁效率,清洁速度,在存在动态障碍物的情况下清洁所 需的时间以及在存在大量粉笔尘的情况下机器人可以清洁的最接近墙壁的距离。
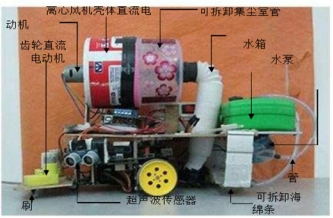
图1:地板清洁机器人指示结构单元的组件
支持来自移动应用程序的控制。一组9.6 V NiMH电池用于供电。图1显示了指示结构单元组件的机器人。表1中列出了机器人的规格。
表1:清洁机器人的规格
|
机器人的组成(厘米2)
|
规格
|
|
微控制器
|
爱特梅尔ATMEGA2560
|
|
感测器
|
一束清晰的红外线(范围约80 厘米)
1个超声波声纳传感器(范围≈2cm-450cm)
|
|
指示符
|
2×16字符液晶蜂鸣器
|
|
控制
|
自主与手动
|
|
通讯
|
红外通讯(从远程到机器人)
|
|
尺寸图
|
长度:30厘米
高度:24厘米
宽度:20厘米
|
|
电池电量
|
9.6 V, 2100 mAH
|
2.机器人结构
机器人的结构单元构建在移动机器人平台上:Fire BirdV。
它由四个结构单元组成:清扫单元,真空单元,擦拭单元和控制单元。清扫单元由两个柔性刷毛刷组成。这些电刷安装在两个直流电动机的轴上。左马达顺时针旋转左刷子,右马达逆时针旋转将灰尘颗粒推向真空吸尘器。真空抽吸单元位于机器人的中间。它由一个由直流电动机驱动的离心风扇组成。这是为了产生导致真空抽吸的气压差。带空气过滤器的可拆卸集尘室收集并存储灰尘。在地板上有待清洁开口的管子将灰尘引导到机舱。擦拭单元位于机器人的后端,旨在沿着机器人运动的路径擦拭地板。它由可拆卸的海绵条和具有均匀孔的管道组成,用于将水从水箱喷到海绵上。
Fire Bird V中的控制器ATmega 2560用于控制扫地,真空吸尘和擦拭单元。机器人上锐利的IR传感器和超声波传感器的组合用于避障和边缘检测。无线模块(蓝牙HC-05)用于扫动,真空和擦拭单元会在任何触摸按钮激活后开始运行。机器人的操作可以通过应用程序转移到自主模式。手动操作模式允许用户使用机器人清洁地板上的关注区域。
3.机器人的运动控制
机器人的运动以两种操作模式控制:手动和自主。可以通过Android应用程序选择操作模式。机器人通过蓝牙以2到2.4 GHz的频率连接到应用程序,范围为10米。
3.1 手动操作模式
该应用程序的主屏幕如图2所示。可以通过移动应用程序上的七个触摸按钮控制机器人向前,向后,向左(左和左轴向),向右(向右和右轴向)和停止的运动的。

图2:用于控制机器人的Android应用技术
3.2 自主操作模式
在这种操作模式下,机器人将从地板上任意放置的位置开始,并在找到房间的连续边缘(即墙壁)后向前移动,并使用超声波和尖锐的IR传感器沿房间移动,保持16 cm的距离。在横穿墙的边缘的两个连续端部时,机器人确认自己位于房间的一个角落中。此后,机器人将以锯齿形移动以遍历地板上的最大区域。机器人使用清晰的红外传感器检测到任何动态障碍物时,会发出蜂鸣器信号作为警报,并在障碍物移开后重新获得其原始路径。
3.3 清洁原理
在自主模式下,机器人首先找到房间的墙壁边缘之一,然后开始边缘跟踪算法。一旦机器人到达跟随墙的边缘的两个连续拐角,它就会开始执行锯齿形运动以遍历整个地板区域。在此过程中,清扫单元中的刷子会沿着机器人的运动从周围收集灰尘,然后将其推向真空单元。真空单元吸入灰尘并将其沉积到集尘室。然后,机器人擦拭单元中的海绵将地板的无尘区域擦拭干净。图3显示了从地板到集尘室的灰尘流以及用于清洁地板的擦拭单元中的水流。
在手动模式下,机器人的清洁单元按照用户通过移动应用程序控制的运动路径,以自主模式工作。
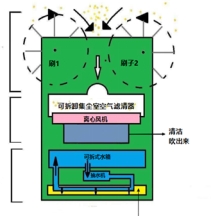
图3:机器人的清洁原理
4.实验装置
实验考虑的面积为140×150 cm2。图4显示了实验平台以及机器人在自主操作模式下遵循的理想路线。地板上充满了粉尘和海绵碎片(≈1cm3),该海绵不均匀地分布在实验中,如图5所示。最靠近墙壁的距离由机器人清洁,相对于地板上海绵的总数(即效率),清洁速率和完成具有不同数量动态障碍物的清洁过程所需的时间,机器人收集的海绵块数在实验过程中已经考虑过。

图4:实验地板(140×150平方厘米),机器人需要经过理想的路径

图5:分布不均的实验地板粉笔粉尘和海绵块
第5章 实验结果
图6显示了自主操作模式下的机器人路径。可以观察到,在实验设置中,机器人从地板上的随机位置开始沿墙的边缘移动,并到达第二个角时,它开始沿锯齿形路径移动。尽管遵循理想的锯齿形模式存在很小的偏差,但它与运动计划算法一致。图7显示了机器人在其上执行清扫,真空抽吸和擦拭操作后的地板。

图6:机器人在自主运行模式下经过的路径
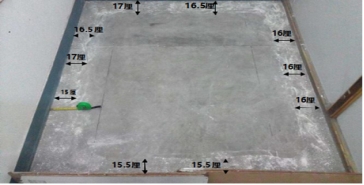
图7:机器人清洁地板后的实验设置,显示了自动模式下机器人可以清洁的最接近墙壁距离
总共650个海绵块不均匀地分布在地板上。在一次试验中,收集在集尘室中的海绵块数用于使用以下公式计算机器人的清洁效率(η):
η= Χ100%
Χ100%
表2列出了机器人在自动驾驶系统中的平均效率
自主和手动操作模式经过10次试验计算得出。由于可以在手动操作模式下在同一区域连续运行机器人,因此与自主操作模式相比,清洁效率更高。
表2:自动和手动操作模式下机器人的效率
|
操作模式
|
平均效率
|
|
自主性
|
≈85%
|
|
手册
|
≈92%
|
机器人可以最接近墙壁的距离是确定其能力的参数之一。图7显示了在自动操作模式下,十个点处的机器人的墙壁和清洁线之间的最小距离。已经发现机器人可以清洁更靠近墙壁的地板,平均距离为≈16厘米图8显示了在存在动态障碍物的情况下机器人所需清洁时间的变化。据报道,该机器人进行了10次清洁试验,其中许多动态障碍物从1到10不等。
在实验装置中,不同大小的区域被认为是由机器人清洁的,以评估其清洁率。表3显示了机器人在不同区域的清洁率。实验结果表明,该机器人的清洁速度约为180 cm2/ sec。
表3:机器人的清洁率
|
区域
(以厘
|
所需时间(以秒为单位)
|
清洗率
(以厘米2/秒
|
|
米2为单
|
清洁区域
|
为单位)
|
|
位)
|
|
|
|
6000
|
37
|
162
|
|
9000
|
54
|
166
|
|
12000
|
65
|
184
|
|
15000
|
83
|
180
|
|
18000
|
105
|
171
|
|
21000
|
114
|
184
|
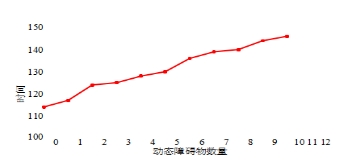
图8:相对于地板上的动态障碍物数量所需要的清洁时间
6.结论
与文献中报道的机器人相比,在三种清洁机理方面:扫地,真空吸尘和擦拭相比,与在可比的清洁速率下用厚粉笔尘层清洁家用地板的能力相比,所展示的机器人很有希望。未来的研究集中在改善结果,设计机器人和在普通家庭环境中进行实验的方向,这有望改善人类的生活方式。该机器人是使用本地技术开发的,如果在消费者测试中获得成功,它将开发出一款具有进取精神的设备。
致谢
人力资源开发部政府提供的财政援助。非常感谢印度机器学习和大数据卓越中心项目的获奖。
7.参考文献
[1] e-yantra. http://www.e-yantra.org/. Accessed: 2017-05-29.
[2] Chaple, A., Bhaskarwar, S., Bhaskarwar, A., and Chidarwar, S. Autonomous cleaning robot. In International Journal of Computer Applications (India, 2012), pp. 1–4.
[3] Chavan, S. P., Dhanvijay, M. R., and Jaybhaye, M. D. A low cost aurdino controlled flfloor mopping robot. International Journal of Engineering Research 5, 2 (2016), 319–321.
[4] Gao, X., Li, K., Men, Y. W. Y., and KiKuchi, D. K. A flfloor cleaning robot using swedish wheels. In IEEE International Conference on Robotics and Biometric (Sanya, China, 2007), pp. 2069–2073.
[5] Hess, J., Beinhofer, M., Kuhner, D., Ruchti, P., and Burgard, W. Poisson driven dirt maps for effiffifficient robot cleaning. In IEEE Intl. Conf. on Robotics and Automation (Germany, 2013), pp. 1–6.
[6] Karthick, T., Ravikumar, A., Selvakumar, L., Viknesh, T., and Parthiban, B. Simple
autonomous cleaner robot. International Journal of Science, Engineering and Technology Research 4, 5 (2015), 1231–1236.
[7] Kaur, M., and Abrol, P. Design and development of cleaner robot automatic and manual. International Journal of Computer Application 97, 19 (2014), 32–38.
[8] Khalid, U., Baloch, M. F., Haider, H., Sardar, M. U., Khan, M. F., Zia1, A. B., and Qasuria, T. A. K. Smart flfloor cleaning robot (clear). In IEEE Standard University Student Application Papers (2016), pp. 1–7.
[9] Palacin, J., Salse, J. A., and Clua, I. V. X. Buliding a mobile robot for a flfloor cleaning operation in domestic environment. IEEE transaction on Instrumentation and Measurement 53, 4 (2004), 1418–1424.
[10] Paul, T. R., Kumar, L. A., Mahamunkar, M., Jose, R. M., and Khan, S. Automated operating room cleaning robot. International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering 5, 4 (2016), 3058–3061.
[11] Thomas, V. J., Xaviour, B., and K.George, J. Cleaner robot. International Journal of Emerging Technology and Advanced Engineering 5, 12 (2015), 285–288.
