除雪机的自动驾驶系统
Hirofumi HIRASHITA, Takeshi ARAI, Tadashi YOSHIDA
摘要: 在冷和多雪的部分的日本,大多数雪被从除雪机器道路中除去,同时,处理路边条件并且保证安全的操作,操作这些机器被两个人正常地操作:一名话务员和一个助手。
工作在进行中为了除雪机器开发自动的驾驶系统在操作人员的雪移去上使负担为了减轻并且减少未来的劳动要求。这报告描述一个自动的驾驶系统结合三种技术: 在最近几年作为一种ITS技术已被发展的通路记号系统,RTKGPS技术和GIS技术, 这驾驶的系统已被发展为旋转除雪机器:雪移去的类型考虑最困难操作。报告也评价基于确证的结果的三种控制方法测试使用实际的除雪机器,同时这些的轮廓问题控制必须被克服建立一个工作的系统的系统。
关键词:雪旋转移去,自动的驾驶,ITS,通路记号,GIS,GPS
1 绪论
在寒冷的多雪部分的日本,雪通过机械的手段是被从道路上除掉保证冬天道路。为了保证机械把雪消要除根据雪在道路表面上的积累状态适当的被清除持交通,心计划的出席控制方法必须被建立,并且机械必须正确地操作。
自动的驾驶系统发展被计划用于旋转的除雪机器:带有一种操作的方法的一类型比那其他类型除雪机更复杂,它已被发展为减少工作人人员除雪负担降低的保障。
2 发展背景
雪移去被两个工作人员操作: 驱使移去的一名话务员同时,控制的射出的一个助手。话务员驱使机器关于道路的控制还密切注意入雪处,助手喷出雪当雪进入机器的时候。除雪机器雪的内部配置十分复杂如图3.1。目的使车辆的部分自动自动化在操作工作执行中话务员允许助手控制雪做射出。未来允许由一人操作。
这报告介绍形成已被发展为自动的驾驶系统的基础的定位技术和控制技术,同时,提出一种评价基于确证测试的结果的系统据以予以执行的雪移去并且描述克服问题完成一个工作的系统。
3 自动操纵系统
已被开发的自动的驾驶系统使雪的清除成为自动化,驾驶也成为了话务员的任务之一。
3.1 驾驶并且雪清除的控制
旋转自动除雪机的驾驶的机制不同于正常的车辆前进和后退部分被别针连系,而清楚说出机制被安装,这样车辆能在别针折弯。驾驶被确切的线性化方法和被的时间规模转换控制有效的制一辆活动的车辆的过程。 这控制方法被受完整的约束影响的运动的一个方程代表并且基于非线性的控制理论。但是,一个雪移去侧翼滑行,因为当它移去雪时,作为雪筑堤围拦受横向的反应力量影响被显示图3.2。小路滑动使用下面被描述的综合的伺服机构系统来将这当做一场外部骚乱对待控制滑动。


图3.1 除雪机内部 图3.2 除雪机除雪
图3.3 显示驾驶机制除雪的一个模型。在未来, 前面轮子和对于后部轮子距离和除雪的连接的别针有距离被L代表,当2α代表过程时,驾驶的角度其后是除雪的半径的一个弧R=L/tan a 。当前面轮子的中心点P的过程正切方向速度矢量被θ代表和正切方向角度被ν代表时,点P的运动的方程能被写如下。
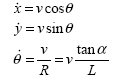 (1)
(1)
公式(1)被完成以便执行状态反馈控制。从等式中定义除学时驾驶的数量是驾驶的角度α中的1/2个。
 (2)
(2)
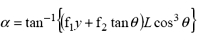
在等式(2)中横向滑动将不是予以考虑。为了除去由横向的滑动造成的稳态的偏差,如果综合的伺服机构系统被使用,驾驶α的数量被如下方程代表
 (3)
(3)
为了除去稳态的偏差符号f是控制获得,同时,基于公式(3),f1代表成适当比例的获得,f2代表派生物获得,而f3代表完整的获得。PID控制被用来建造系统
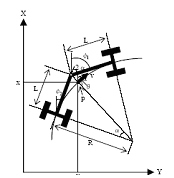
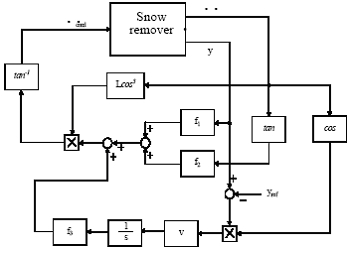
图3.3 协调系统 图3.4 集成伺服机构系统控制块图形
3.2 定位方法
发现一种车辆为了执行自动的驾驶的信息是必要的位置并且有确定方向驾驶它。已被开发的系统装备有两种功能: 指导方法使用通路记号传感器发现使用GPS和GIS来发现车辆位置和驾驶的方法。
3.3 通路记号传感器指导方法
一台通路记号传感器是为了使用作为先进的运输系统( ITS )的部分被开发的高级的巡航帮助公路系统( AHS )的一种基本的技术。这技术包括间歇地被埋入在一个道路表面下面的通路记号,而车辆爬升发现被这些通路记号传送的信号沿着被记号形成的过程指引车辆的传感器。有这系统的两种版本: 无线电波浪方法和磁性的方法。
(1) 角度计算逻辑
我们假定,通路记号之间的距离将不是经常的,但是,根据道路的形状和传感器边的要求能被变化。因此,这系统装备有两台行的传感器,这样甚至当通路记号安装间隔都被知道,直到除雪机器传递过他们才能控制执行。如图3.5:
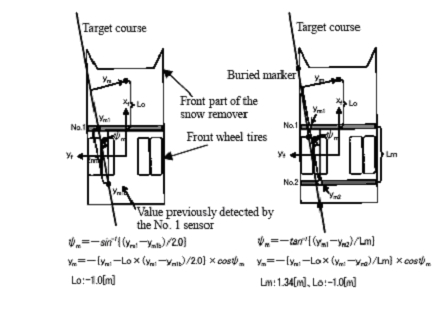
图3.5 通路记号传感器指导方法
对于用一单一的行的传感器驾驶的控制,如(第3.5图左边)通过目标过程为控制所需要的横向的微分和方位的有差别的ym和ψm协调系统∑(xy)除传感器之外要求关于记号之间的间隔的信息发信号ym1被前面车辆测量固定协调系统∑f ( xfyf )接受。但是,用两台行的传感器(第3.5图右边),系统能计算横向的微分和目标过程的方位的有差别的ym和ψm通过两协调系统∑(xy)反对当它传递amarker,直到他们传递下一个记号时,被前面车辆测量的ym1和ym2协调系统∑f ( xfyf )的传感器控制两个传感器信号固定,这样驾驶控制能被执行即使记号之间的间隔是未知的。
(2)电波记号传感器定位方法
有了无线电波浪方法,一个天线在车辆上的传感器内部朝着道路传送227.5台kHs无线电波浪,以及当一台无线电波浪记号(图3.6 )收到这转播,它归还455 kHz的双频率的一个信号。 在传感器内部的一个收到的天线收到这返回无线电波浪发现车辆的位置(图3.7)。
朝着穿过的运动的方向的高峰价值。 它在中发现位置通过通过基于在被两感到的返回无线电波浪的收到的力量的区别的成三角形方法计算天线之间的距离横向的收到方向天线


图3.6无线电摇动记号 图3.7无线电波浪记号传感器
(3)磁性的记号传感器定位方法
有了磁性的方法,有持久标记的铁酸盐磁铁(图3.8)安装在地表面以下,磁铁上还安装一台磁性的传感器。
课题分配磁性的记号显示将记号的中心当做最大限度课题力量对待的单峰。 这课题的垂直的组成部分( Bz )和车辆宽度方向组成部分( Bx )的磁性的流密度被磁性的传感器和位置记号发现被计算之间的距离发现,基于以前约定的Bx与Bz有关系的方程传感器和记号。(图3.9)

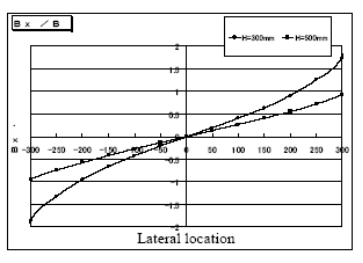
图3.8 磁性的记号 图3.9 Bx与Bz关系
3.4 GPS与GIS定位发现方法
基于GPS与GIS定位的一个系统发现车辆的位置通过比较旋转的雪移去位置控制其操作把从一个GPS卫星被收到的数据与位置相协调为了提前被道路GIS提供的道路协调线性的数据。
(1) 路GIS道路GIS是有关用于道路维护的结构和交通管理的信息的一个数据库。
为了开发这系统,旋转的雪移去目标过程信旋转的雪removers的话务员移去雪通过推动息被建立,这样它能被处理作为GIS数据。扩展裸露的道路他们的被雪消除边界(图3.10)指引的车辆因为雪消除边界经常沿着道路的双方是人行道的控制,被使用的GIS数据是控制数据。
图3.10 道路GIS数据
(2)TK-GPS
RTK-GPS,有高精度的定位( 2点和3点cm )之间的差错半径的能力的一个系统,包括收到天线的两GPS,一个固定站另一个固定在运载工具车站(在除雪机)上。 固定的车站传送基于它已收到到运载工具车站的GPS数据的纠正信息。系统几乎能执行实时定位,因为GPS数据以20Hz的速度被纠正。
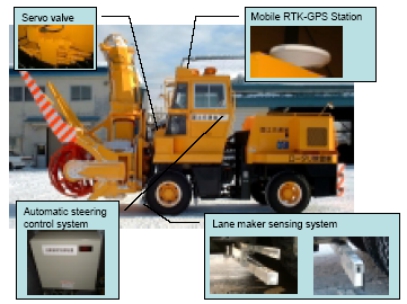
图4.1 装备有一种自动的驾驶支持功能的除雪机
4 确证的测试
消除在一月和2002年二月在北海道使用装备有驾驶的控制系统的旋下面的自动的驾驶方法的适用性和实用性是一条实际的道路(低速率,横向滑动)上的一个雪移去所特有的。转的雪移去被实行。
4.1 确证测试的轮廓
(1) 被机器移去
除雪机器的体积分为大中小型经常被使用在过家的公路上,据正常的说明建造部分地被修改(图4.1)。
(2) 验证的测试过程
确证的测试过程包括直的段,曲线,( R 30 m ),以及相交( R 12 m ),这样它在公路上复制条件下, 其通路记号间隔是2.0 m和1.5 m 。
除雪的工作条件与实际的工作的那些相同,而工作以两种速度被做,4公里与h和0.5公里与h 。雪银行被准备提供当一个移去被用来扩展清除的部分的一条道路时,发生的工作装载和横向的滑动。
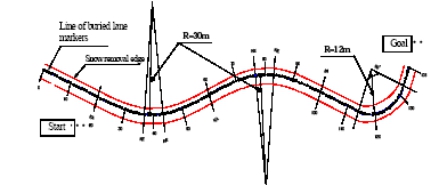
图4.2 测试过程的布局
4.2 确证的测试的结果
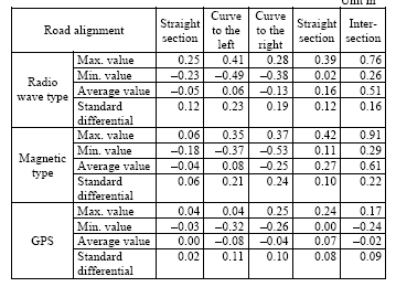
测试证实通路记号弹着点方向观测(无线电波浪和因为驾驶的控制系统发展是跟随的一个系统预置目标过程,其控制性能从其目标过程(横向的偏差)的数量被评价为雪移去的
偏差的数量。 表5.1表示从被方法组织的测试结果显示横向的偏差的数量。磁性)指导方法和GPS与GIS定位方法。
这桌子展览那么总的来说,偏差和标准的偏差的数量在直的段上是小的,但是他们两个都在曲线上在相交更高。 这区别大概地是被执行的事实的一种结果在带有曲率的一条小的半径的段中,大量的驾驶,并且雪消除装载是更可能造成横GPS与GIS方法优于
通路记号方法。 因为以前的方法几乎取得几乎20Hz的实时定位和驾驶控制,它立即能对作出反应减少偏差的数量横向滑动。 有了后面,驾驶被延迟因为系统不能发现没有通路记号之间的信号,在大量的横向的偏差中导致的横向的滑动。 因此,测试被完成,提供,除用传感器纠正横向的滑动之外,当传感器传递记号时,协调下一个记号(过程信息)。导致横向的滑动的分配揭示作为这时被领进图4.3,±2σ(σ:标准的微分)是没有过程信息的±57 cm,而它是过程信息的±31 cm: 极端带来其精度的一大的改进和接近那个GPS与GIS方法。
在之间的性能中的没有间距速度4公里与h和0.5与h被观察。
5 结论和未来挑战
已被确认自动的驾驶系统使用通路记号或者GPS的,GIS等等能通除雪机取得正常的雪消除工作的一个一般地实际的水平的控制。 但是,为了建立实际的工作的系统,如下挑战必须被解决。
(1) GPS与GIS方法显示其发现精度甚至暂时在敞开的空间中落下。 当GPS卫星在一个狭窄的范围中被集中时,我们假定这发生。 同时,在测试期间无线电波浪记号方法,认为是车辆上的高的输出传输器的一种结果无法预言的行为被观察。 提供是必要功能当这样反常的操作的信号被生产时,那没有干涉话务员而自动地停止操作。
(2) 为GPS与GIS情况,靠通路改进控制的精度是必要通过进入通路记号的记号方法提前协调到雪移去系统向它提供过程信息。 每次系统传递过记号,记录在每一记号上的通道是也十分重要。
(3) 更进一步改进控制精度(减少偏差的数量),努力量化诸如的骚乱横向
的滑动,与雪消除装载等等在把雪消除工作的模型的细节的程度增加旋转的雪移去之后并且执行仿真是必要雪移去。
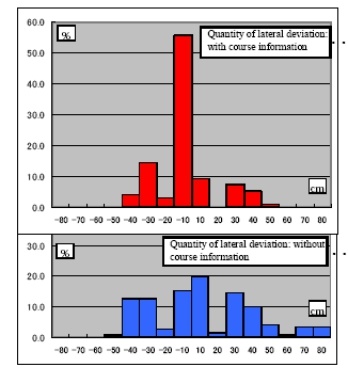
图4.3 横向的偏差(无线电波方法)
在最近几年,各种各样的组织已试图运用信息技术( IT )改进建设机械。 当时在那些情况中看见,信息在这种情况中处理不能被运用于其它系统,除非它
表5.1每一系统的横向的差异
独立的操作(工作加速4公里与h,前面传感器的偏差的数量)
在最近几年,各种各样的组织已试图运用信息技术( IT )改进建设机械。 当时在那些情况中看见,信息在这种情况中处理不能被运用于其它系统,除非它的用途在标准化时被假定。 因为被这项目发展的除雪机通路记号的新的道路基础设施,道路GIS数据。同时,通信系统和其通信标准必须被标准化,其发展用ITS领域中的通信技术已被协调。 作者希望这研究与发展将促进作为一个工作的系统介绍它。
最后,作者希望向Hokuriku地区表达他们的深的感激地基础设施的部的发展局和北海道地区的发展局,和运输其帮助确证的测试和对于帮助系统和测试的工作的建造的每个人。
