|
课题名称
|
镗铣加工中心换刀机械手部件设计
|
|
目 录
1 选题的背景与意义
1.1 国内外研究现状和发展趋势
1.11 机械手简介
1.12 机械手的分类
1.2 换刀机械手研究意义
2 研究的基本内容与拟解决的主要问题
2.1 基本内容
2.2 拟解决的主要问题
3 研究思路方案、可行性分析及预期成果
3.1 研究思路方案
3.2 可行性分析
3.3 预期研究成果
4 研究工作计划
成绩:
|
|
答 辩
意 见
|
答辩组长签名:
年 月 日
|
系主任审核意见
|
签名:
年 月 日
|
镗铣加工中心换刀机械手部件设计
洪之奇
(机械设计制造及其自动化09(4)班 B09300410)
1 选题的背景与意义
机械制造业是一个国家最基础的行业,为整个国民经济提供技术装备,其发展水平是国家工业化程度的主要指标之一。在机械工业中,应用机械手的意义可以概括如下:
一、以提高生产过程中的自动化程度
应用机械手有利于实现材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化的程度,从而可以提高劳动生产率和降低生产成本。
二、以改善劳动条件,避免人身事故
在高温、高压、低温、低压、有灰尘、噪声、臭味、有放射性或有其他毒性污染以及工作空间狭窄的场合中,用人手直接操作是有危险或根本不可能的,而应用机械手即可部分或全部代替人安全的完成作业,使劳动条件得以改善。
在一些简单、重复,特别是较笨重的操作中,以机械手代替人进行工作,可以避免由于操作疲劳或疏忽而造成的人身事故。
三、可以减轻人力,并便于有节奏的生产
应用机械手代替人进行工作,这是直接减少人力的一个侧面,同时由于应用机械手可以连续的工作,这是减少人力的另一个侧面。因此,在自动化机床的综合加工自动线上,目前几乎都没有机械手,以减少人力和更准确的控制生产的节拍,便于有节奏的进行工作生产。
综上所述,有效的应用机械手,是发展机械工业的必然趋势。
1.1 国内外研究现状和发展趋势
1.11机械手简介
人类在面对对人体健康有害的各种射线、高温和低压、高压和低压,进行深水考察,以及操作有毒性的和爆炸性的物质时,都必须利用各种远距离操作设备。远距离操作设备与普通设备的主要区别,在于能够通过适当的生物屏蔽把操作人员与危险源隔开进行操作。作为这种屏蔽的有各种防护屏、屏蔽箱、热室和其它箱室的壁,有时亦可采用加大距离的办法。 机械手就是这样一种远距离操作设备[1]。
机械手是由操作人员或程序装置远距离操纵的一种装置。它包括供模仿人手的移动和关节动作功能用的操作机构。
机械手通常是由安装在危险区内的从动臂、安装在危险区外的主动臂和穿墙(防护屏)的连接臂组成。
工业机械手是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。机械手是在机械化,自动化生产过程中发展起来的一种新型装置。在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发殿起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用自动换刀装置是数控加工中心在工件的一次装夹中实现多道工序加工不可缺少的装置, 主要由刀库、机械手和驱动装置几部分组成。
1.1.2 机械手的分类
目前,机械手尚无通用的分类方法。它们可按不同的特点分,例如,根据从动臂对于主动臂动作的模仿程度,主动臂上力的再现,用途,从动臂与主动臂的连接形式,操作方法,外形等分类。
实践中所采用的机械手可分为四类:1)剑式机械手;2)机械传动和密封磁力机械传动机械手;3)电动机械传动、液压和气动机械手;4)特殊机械手[1]。
第一类机械手一般不能完全模仿操作人员的手关节的动作。但是,由于其结构简单、价格便宜,因而获得广泛应用,是通用的机械手。
第二类机械手能完全模仿操作人员的手关节的动作(有七个和七个以上的动作)。它比第一类机械手较为复杂。由于其操作方便、价格不太高,所以也得了广泛应用。磁力机械传动机械手比机械传动机械手略微复杂,而且昂贵,但能保证箱室的完全密封。
第三类机械手比第二类机械手更加复杂而且昂贵。这类机械手的某些类型得了广泛应用,尤其是用于操作间与箱室之间要求高度密封,进行远距离操作和主动臂作用于从动臂的力按比例反射操作的地方。这一类的非模拟机械手有杠杆或控制装置和普通(非随动的)电传动装置,简化了结构,降低了价格。
第四类机械手装有控制装置,这类机械手的抓举能力很大,可用于完成预先给定的工序。
其中换刀机械手也有各种分类:
⑴单臂单爪回转式机械手
机械手摆动的轴线与刀具主轴平行,机械手的手臂可以回转不同的角度来进行自动换刀,换刀具的所花费的时间长,用于刀库换刀位置的刀座的轴线相平行的场合。如图1所示:
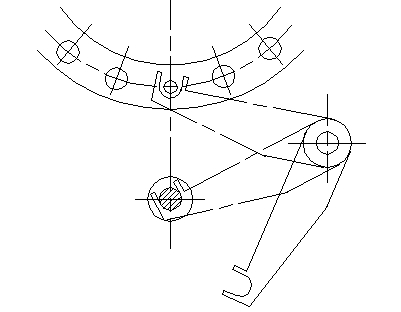
图1单臂单爪回转式机械手
⑵单臂双爪回转式机械手
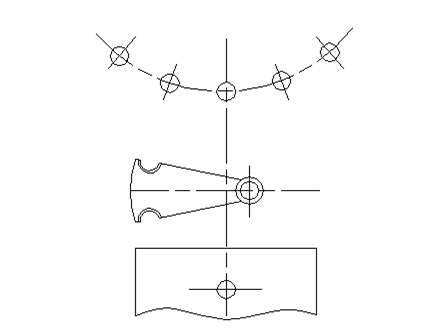
图2单臂双爪回转式机械手
这种机械手的手臂上有两个卡爪,两个卡爪有所分工,一个卡爪只执行从主轴上取下“旧刀”送回刀库的任务,另一个卡爪则执行由刀库取出“新刀”送到主轴的任务,其换刀时间较上述单爪回转式机械手要短,如图2所示。
这种机械手的两臂各有一个卡爪,可同时抓取刀库及主轴上的刀具,在回转之后有同时将刀具归回刀库及装入主轴,是目前加工中心机床上最为常用的一种形式,换刀时间要比前两种都短,如图3所示。
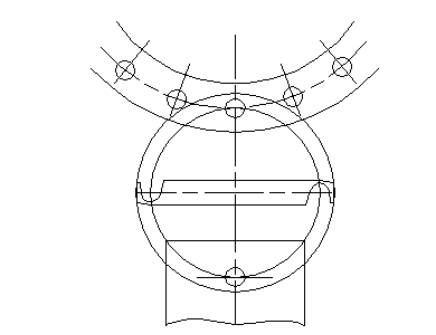
图3双臂回转式机械手
这种机械手在有的设计中还采用了可伸缩的臂如图4所示:
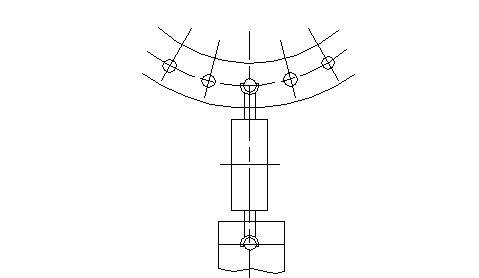
图4双臂回转式机械手
这种机械手相当与两个单臂单爪机械手,相互配合起来进行自动换刀。其中一个机械手执行拔旧刀归回刀库,另一个机械手执行从刀库取新刀插入机床上,如图5所示。
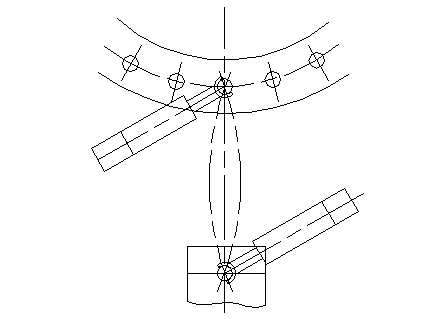
图5双机械手
⑸双臂往复交叉式机械手
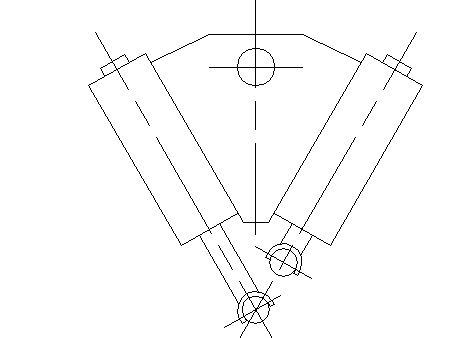
图6双臂往复交叉式机械手
1.1.3工业机械手研究趋势
目前工业机械手主要用于机床加工、铸造、热处理等方面,无论数量,品质还是性能方面都不能完全满足工业发展的需要。
在国内主要是逐步扩大应用范围,重点发展铸造、热处理方面的机械手,以减轻劳动强度,改善作业条件,在应用专业机械手的同时,相应的发展通用机械手。在自动换刀装置的研究上还要解决一些关键技术问题:如优良运动曲线选择、机构运行可靠性、换刀复合凸轮的设计,凸轮的精密加工等。
此外,国外机械手的发展趋势是大力研制具有某种智能的机械手。使它具有一定的传感能力,能反馈外界条件的变化,做相应的变更。如位置发生少许偏差时,即能更正并自行检测,重点是研究视觉功能和触觉。目前,已经取得一定成绩。
1.2 换刀机械手研究意义
随着科学与技术的发展, 机械手的应用领域也不断扩大。目前, 机械手不仅应用于传统制造业如采矿,冶金,石油,化学,船舶等领域,同时也已开始扩大到核能,航空,航天,医药,生化等高科技领域以及家庭清洁,医疗康复等服务业领域中。如,水下机器人,抛光机器人,打毛刺机器人,擦玻璃机器人,高压线作业机器人,服装裁剪机器人,制衣机器人,管道机器人等特种机器人以及扫雷机器人,作战机器人,侦察机器人,哨兵机器人,排雷机器人,布雷机器人等军用机器人都是机械手应用的典型。机械手广泛应用于各行各业。而且,随着人类生活水平的提高及文化生活的日益丰富多彩,未来各种专业服务机器人和家庭用消费机器人将不断贴近人类生活,其市场将繁荣兴旺。
换刀机械手的结构设计和研究是数控加工中心研究的基础。因此,对具有理想结构和传动方式的换刀机械手进行抓取机理、操作理论、运动学和动力学、控制理论、信息集成等方面的研究是最有效也是最有意义的。
2 研究的基本内容与拟解决的主要问题
2.1 基本内容
本次毕业设计中主要完成的内容包括:
(1)镗铣加工中心换刀机械手结构设计
分析换刀机械手的工作原理,机械手模型建立及运动分析,进行原理性换刀机械手的方案设计。
(2)镗铣换刀机械手三维CAD建模、装配
机械手各关节部分的具体结构设计,利用Pro/Engineer软件建立三维模型,进行装配分析,进一步改进结构设计。
(3)镗铣换刀机械手的关键部位的强度校核计算
对机械手几个主要的零件进行强度校核计算,对尺寸结构等参数进行调整设计。
2.2 拟解决的主要问题
通过设计实现使机械可以顺利的抓取多种尺寸的待加工件,并实现待加工件的换向,完成待加工件的加工要求。减小手的体积、质量和功耗。因为过大的体积将影响外观,而且有可能会妨碍到加工机床的运作; 过重的手部和过大的功耗将加重臂部的负担,加速零件的磨损, 加重电源负担。手部自由度数目、驱动类型、传动方式、关节机构、所用材料以及运动特性等对手的体积、质量和功耗均有较大影响。根据物体质量、尺寸和表面性质, 手在抓取时应该采用不同抓取力, 即手的抓取力应具有一定的可控性。
3 研究思路方案、可行性分析及预期成果
本设计论文拟采用理论分析与三维建模与仿真实验的方法,在已有的基础上,通过三维Pro/E环境完成镗铣加工中心换刀机械手的设计仿真。
3.1 研究思路方案
具体思路方案包含以下两个方面:
3.1.1目前已有的换刀机械手原理分析:
如图7所示整个机械手主要由: 行程开关, 挡环,齿轮, 连接盘, 销子, 传动盘, 升降液压缸, 滑轴, 齿条,转位液压缸, 机械手组成。其工作原理为: 上、下两个液压缸分别驱动两组齿轮齿条实现机械手的旋转运动; 为了保证上下两个旋转运动互不干扰, 中间采用一根滑轴上固接一个传动盘的结构, 传动盘与齿轮通过销来传递运动, 机械手换刀动作到位与否则是通过行程开关来检测, 外加档块进行限位, 从而实现机械手的自动换刀功能。。图8为该换刀机械手的结构示意图, 其换刀过程如下:
(1)刀套转90b: 换刀之前, 刀库2 转动将待换刀具5送到换刀位置, 之后把带有刀具5的刀套4向下翻转90b, 使得刀具轴线与主轴轴线平行。
(2)机械手转90b:两手分别抓住刀库和主轴3上的刀柄。
(3)刀具松开: 刀具的自动夹紧机构松开刀具。
(4)机械手拔刀: 机械手臂下降, 同时拔出两把刀具。
(5)机械手转180b:使主轴刀具与刀库刀具交换位置。
(6)机械手插刀: 机械手上升, 分别把刀具插入主轴锥孔和刀套中。
(7)刀具夹紧: 刀具插入主轴的锥孔后, 刀具的自动夹紧机构夹紧刀具。
(8)机械手松刀: 机械顺时针转90b, 回到原始位置。
(9)刀套向上翻转90b:刀套带着刀具向上翻转90b,为下一次选刀做准备。[2]

图7机械手结构图
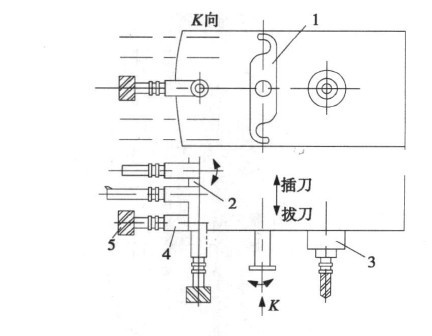
图8机械手的换刀示意图
3.1.2 基于Pro/ E设计平台的三维CAD设计
目前,随着计算机辅助技术的不断发展,三维造型软件功能不断完善,传统的二维设计正逐渐被三维实体设计所代替。
Pro /Engineer是美国PTC公司于1988年开发的参数化设计系统,是一套由设计至生产的机械自动化的三维实体模型(3DS)设计软件,它不仅具有CAD 的强大功能,同时还具有CAE 和CAM 的功能,广泛应用于工业设计、机械设计、模具设计、机构分析、有限元分析、加工制造及关系数据库管理等领域。而且能同时支持针对同一产品进行同步设计,具有单一数据库、全相关性、以特征为基础的参数式模型和尺寸参数化等优点。
运用Pro/ E三维设计平台,通过对特征工具的操作,避免高级语言的复杂编程,所开发设计出来的三指三关节的欠驱动三指手,便于研究人员通过对界面特征工具的操作,生成欠驱动三指手实体模型,甚至输出所需要的工程图及相关分析数据。这样既可辅助研究人员完成其设计构思、减轻劳动强度、提高效率和精度、改善视觉的立体效果,并可有效地缩短研制周期,提高设计制造的成功率;也为后续的3D运动学仿真分析奠定了基础。
3.2 可行性分析
换刀机械手的广泛应用给数控加工中心的发展提供了强大的技术支持,使加工步骤简化,加工时长大幅缩减,并适应多种加工任务。经过几年的研究与发展,在换刀机械手结构学、运动学建摸、分析与设计方法方面已取得了一定的研究成果[2-7],在机床加工、铸造、热处理等领域已有重要的应用。在已有的研究工作基础上,本设计论文进行镗铣加工中心换刀机械手设计与仿真,在基本原理上是可行的。
本设计的工作主要涉及力学、机械原理和机械设计等方面的知识,以及Pro/ E设计工具,本人已学习了这些相关课程,并取得了较好的成绩,掌握了本设计所需的基本知识。
指导老师及其课题组在换刀机械手的相关研究方面具有很多成功的经验,本设计的研究方法思路经过深思熟虑,切实可行,能够确保毕业设计的顺利完成并取得预期的研究成果。
3.3 预期研究成果
设计出结构可靠的新型镗铣加工中心换刀机械手,完成三维建模。通过仿真分析,保证设计能较好的满足设计要求。
4 研究工作计划
|
|
内容
|
|
|
调研、信息汇总,文献查阅分析
|
|
|
外文翻译、文献综述、开题报告,并熟悉理论力学、机械原理等相关知识
|
|
|
提交开题报告、文献综述及外文翻译
|
|
|
开题答辩
|
|
|
镗铣加工中心换刀机械手整体方案设计
|
|
|
机械手结构设计及零部件设计
|
|
|
三维CAD建模、装配
|
|
|
三维运动学分析仿真
|
|
|
结构改进设计及毕业论文撰写
|
|
|
完成并提交毕业论文,整理材料准备答辩
|
|
待定
|
论文答辩
|
参考文献
[1] 李剑玲,贺炜,丁毅,王宁侠.一种换刀机械手卡爪夹紧机构的设计[J].组合机床与自动化加工技术,2003,(10):48.
[2] 张祺,侯力,刘松等.加工中心换刀机械手控制系统研究[J].组合机床与自动化加工技术,2010,(8):42.
[3] 马浩源.浅谈工业机械手[J].商情,2011,(12):154.
[4] 牟世维.双主轴双刀库立式加工中心机床设计.甘肃科技.2007,(12):35.
[5] 杜祖钧,贾争现.滚子齿形凸轮循环图的设计与分析[J]. 西北轻工业学院学报. 2002,(5)
[6] 谢政. 加工中心换刀机械手的研究[D]. 湘潭大学. 2008,05.15.
[7] 夏粉玲,贺炜. 凸轮式立卧两用换刀机械手的研究[J]. 机械科学与技术, 2004, 23(3):320.
[8] 许可诚,顾寄南,王富良. 换刀机械手控制系统的设计与研究[J]. 机械设计与制造, 2011,第8期:158.
[9] 宋超,杨代华,罗志建. 小型立-卧自动转换式加工中心机械装置的研制[J]. 煤矿机械, 2007, 第28卷(10):106.
[10] 钱济国. 回转型机械手手指的设计及夹持误差分析[J].设计与研究. 2003,第4期:22.
[11] 孟兆明. 一种新型机械手尺寸的最优化设计[J]. 青岛化工学院学报. 2000, 21(3):246.
[12] 郑俊,许明恒,高宏力,单俊峰.PCB钻床自动换刀机械手换刀部分的设计分析[J],现代机械,2008,第1期:6.
[13] S. Mekid a,*, P. Pruschek b, J. Hernandez c, Beyond intelligent manufacturing: A new generationof flexible intelligent NC machines[J], Mechanism and
Machine Theory,2009(44):466-476.
[14] Lee J,Kinematic Synethsis of Industrial Robot Hand/Gripper-A Creative Design Approach[J],End Effect,1988(4):257-263.
