电动扳手设计
[摘要] 在大型钢结构建筑中,广泛使用高强度螺栓链接。这种螺栓连接,在施工中要求用规定的拧紧力矩锁紧螺母,以保证链接的可靠性。
由于高强度螺栓的材料和热处理是严格控制和检查的,因此螺栓定力矩切口处的扭剪断裂力矩能够控制在一个比较准确的范围,从而能保证螺栓连接的可靠性。当拧紧力矩过大时,不能保证螺栓的强度;当拧紧力矩过小时,又不能保证连接的可靠性。因此这种螺栓连接,在施工中要求用规定的拧紧力矩锁紧螺母,以保证链接的可靠性。另外,高强度螺栓往往成批使用,并且工作的环境也比较坚苦,如果是用普通扳手进行定力矩拧紧,工人拧紧螺母的过程中会有很多不便,工作效率也会很低。综合以上三点原因,在拧紧高强度螺栓时,我们采用电动扳手代替手从扳手进行拧紧。
电动扳手以220V交流电源为动力进行工作,可以保证每个螺栓的拧紧力都在规定的范围内,同时,采用电动扳手代替手动扳手可以大大提高螺栓拧紧的速度,提高工人的工作效率,改善工人的劳动强度
[关键词] 电动扳手 谐波传动 柔轮
Electric Wrench Design
[Abstract] In large steel structures, widely used in high strength bolts links. This bolt connection, in accordance with requirements of the construction of torque lock nut and to guarantee the reliability of the link.
Due to the high strength bolts of material and heat treatment is strict inspection and control, thus shall the bolt torque incision torshear fracture in a moment can control the accuracy and can guarantee, the reliability of the bolt connection. When large torque, cannot guarantee the strength bolt, When the torque, and after hours cannot guarantee the reliability of the connection. Therefore the bolt connection, in accordance with requirements of the construction of torque lock nut and to guarantee the reliability of the link. Additionally, high strength bolts, and often used to working environment is hard, and if it's used for torque wrench on ordinary workers, tighten lock nut process will have a lot of inconvenience, the working efficiency is also very low. Three reasons, in comprehensive above tighten high strength bolts, we adopt electromotive spanner from wrench to replace hand tighten.
Electromotive spanner to ac power for power on 220V work, can guarantee each bolt tightened force within a prescribed scope, at the same time, using electric wrench instead of manual wrench screw bolts can greatly improve the speed, improve work efficiency, improve the worker labor intensity
[Key words] Electric wrench Harmonic Drive Flexspline
目 录
前 言 ……………………………………………………………………………1
第 1 章 设计任务分析 ……………………………………………………………2
1.1 设计任务 …………………………………………………………………2
1.2 设计意义 …………………………………………………………………2
第 2 章 方案设计 …………………………………………………………………3
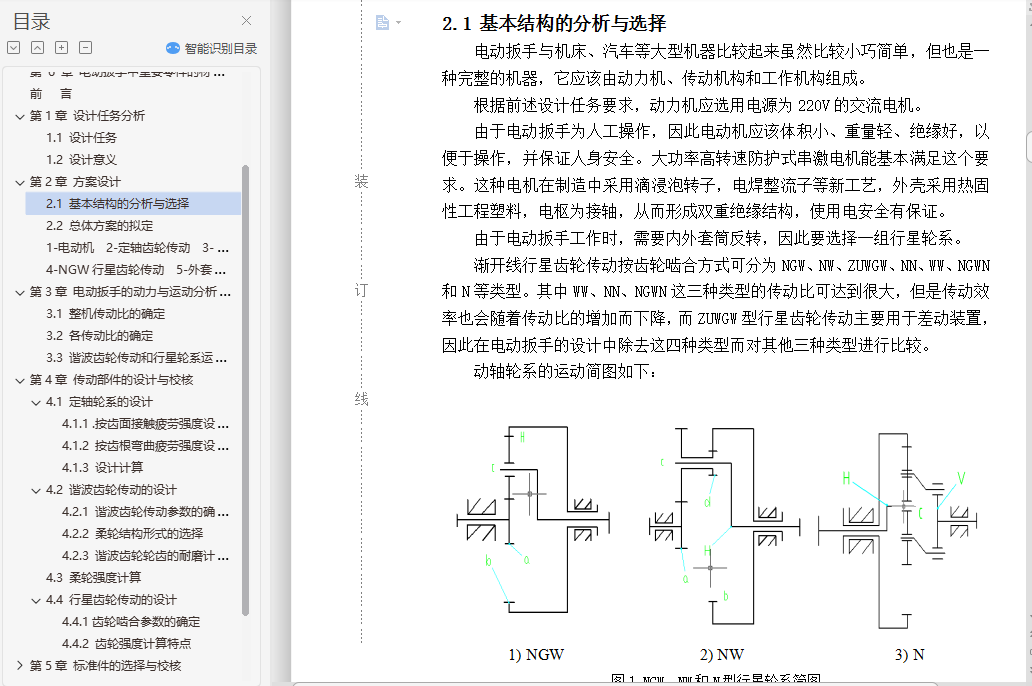
2.1 基本结构的分析与选择 …………………………………………………3
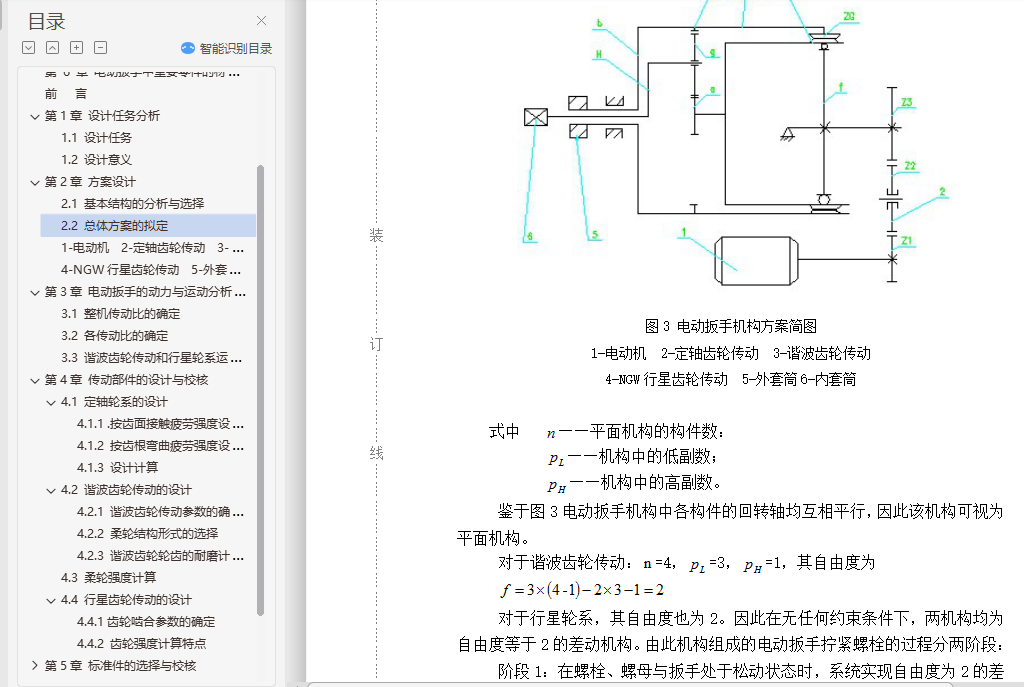
2.2 总体方案的拟定 …………………………………………………………5
第 3 章 电动扳手的动力与运动分析计算 ………………………………………8
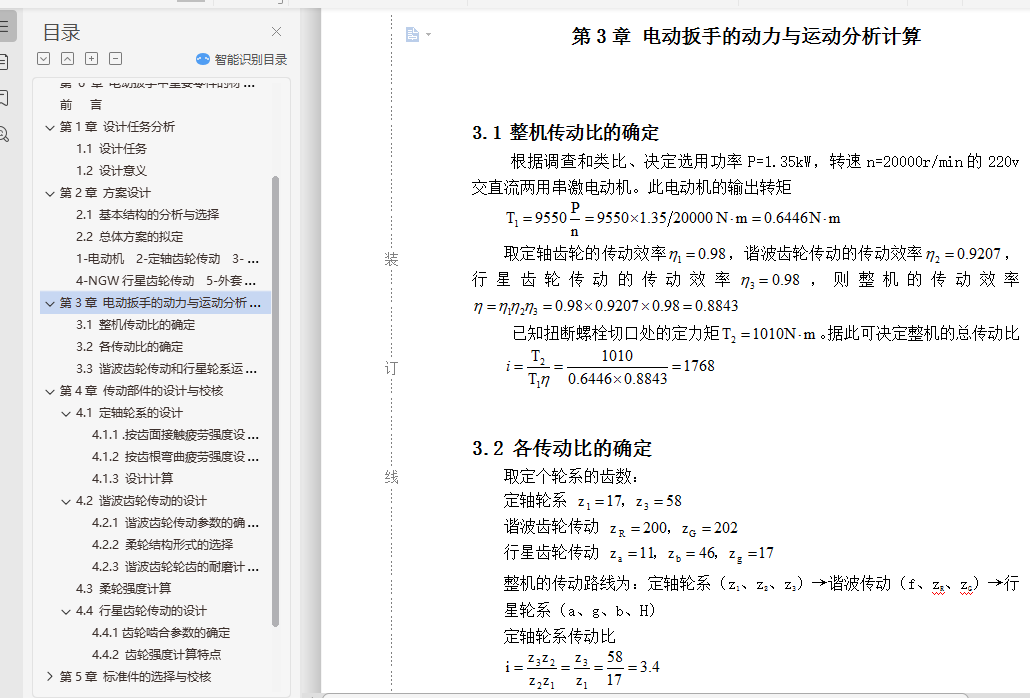
3.1 整机传动比的确定 ………………………………………………………8
3.2 各传动比的确定 …………………………………………………………8
3.3 谐波齿轮传动和行星轮系运动分析 ……………………………………9
第 4 章 传动部件的设计与校核…………………………………………………11
4.1 定轴轮系的设计…………………………………………………………11
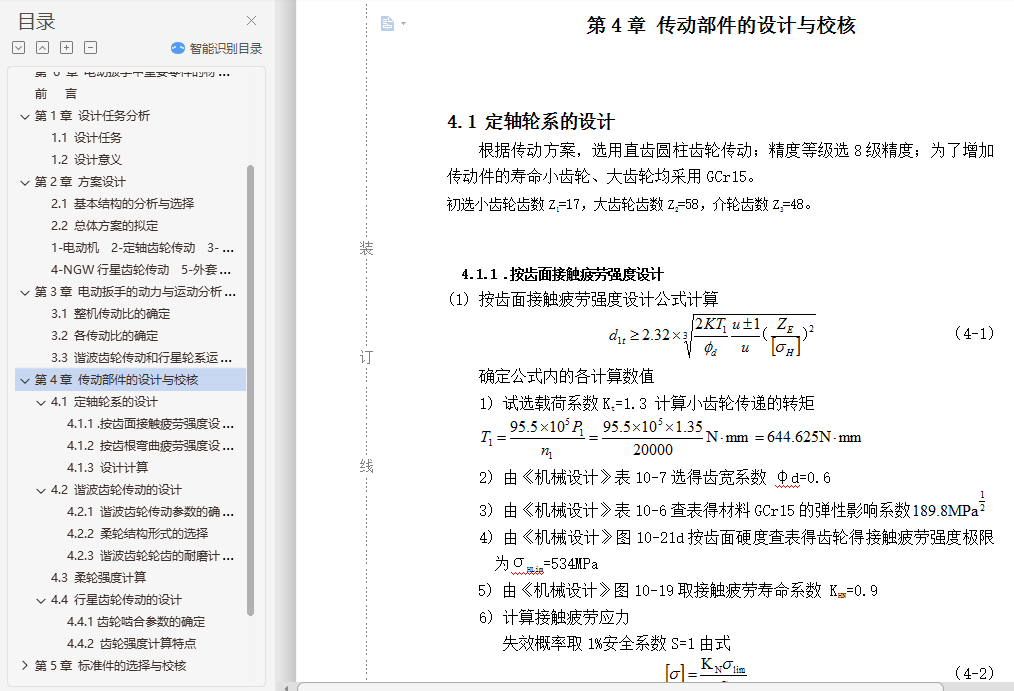
4.1.1 .按齿面接触疲劳强度设计 ……………………………………11
4.1.2 按齿根弯曲疲劳强度设计………………………………………12
4.1.3 设计计算…………………………………………………………13
4.2 谐波齿轮传动的设计……………………………………………………14
4.2.1 谐波齿轮传动参数的确定………………………………………14
4.2.2 柔轮结构形式的选择……………………………………………15
4.2.3 谐波齿轮轮齿的耐磨计算………………………………………15
4.3 柔轮强度计算……………………………………………………………16
4.4 行星齿轮传动的设计……………………………………………………17
4.4.1 齿轮啮合参数的确定……………………………………………17
4.4.2 齿轮强度计算特点 ……………………………………………17
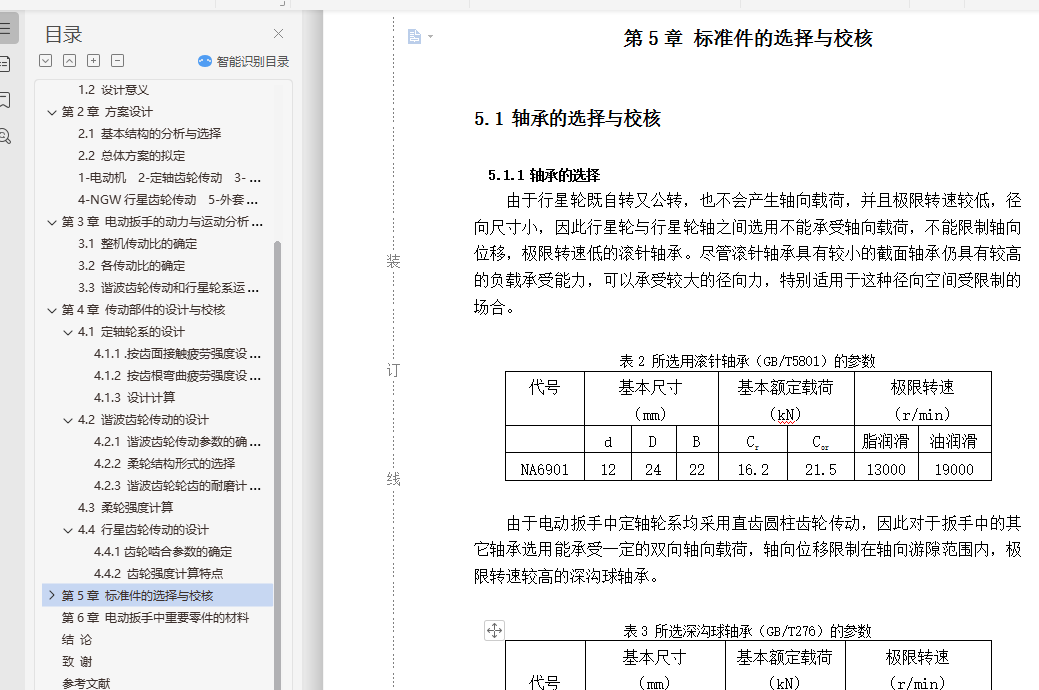
第 5 章 标准件的选择与校核……………………………………………………21
5.1 轴承的选择与校核………………………………………………………21
5.1.1 轴承的选择………………………………………………………21
5.1.2 轴承的校核………………………………………………………22
5.1.3 轴承的润滑方式…………………………………………………22
5.2 键的选择与校核…………………………………………………………22
5.2.1 键的选择…………………………………………………………22
5.2.2 键的校核…………………………………………………………22
5.3 圆柱螺旋压缩弹簧的设计………………………………………………23
第 6 章 电动扳手中重要零件的材料……………………………………………27
结 论 ………………………………………………………………………………29
致 谢 ………………………………………………………………………………30
参 考 文 献 ………………………………………………………………………31