|
研究意义:
随着第一台机器人的诞生,机器人的发展已经涉及到航空、交通、国防等领域。近年来机器人的智能化水平不断提高,也在改变着人们的生活方式。在科学探索和紧急抢险中经常会遇到对与一些危险或人类不能直接到达的地域的探测,并且对所检测的情况进行显示和报警,这些就需要用机器人来完成。而在机器人在复杂地形中行进时自动避障和智能报警是项必不可少也是最基本的功能。因此,自动避障和智能报警系统的研发就应运而生。我们的自动避障小车就是基于这一系统开发而成的。此外本设计还加入了液晶显示部分。同时本次设计可全面提高个人对单片机技术、传感器技术智能控制技术、计算机控制技术知识的综合应用能力。掌握从系统级、电路级到芯片级各层次的设计和实现手段。在此设计过程中,将会用到多门学科的理论知识,是对以前所学知识的一个全面的复习和巩固,更重要的是培养自我分析问题和解决问题的能力,还增强了实际的动手能力。
研究预期目标:
1.实现小车的避障功能,小车遇到障碍物时,当距离障碍物大于25cm,PWM信号自增,驱动电机加速,小车加速前进,当小于15cm时,PWM信号自减,驱动电机减速,小车减速前进,并且小车采取相应的避障措施。
2.采用红外线传感器作为探测装置,运用单片机搭建控制电路,把红外信号接到单片机上,通过单片机对信号的检测和处理,控制外围电路使小车转向,来避开障碍物。
3.通过H桥驱动电路来控制电机的转向和前进。
研究基本内容:
1.现小车的避障功能:小车遇到障碍物时,当距离障碍物大于25cm,PWM信号自增,驱动电机加速,小车加速前进,当小于15cm时,PWM信号自减,驱动电机减速,小车减速前进,并且小车采取相应的避障措施
2.探测装置:因为红外在距离检测方面的准确定位。所以采用红外线传感器作为探测装置
3.运用单片机搭建控制电路:把红外信号接到单片机上,通过单片机对信号的检测和处理,控制外围电路使小车转向,来避开障碍物并通过H桥驱动电路来控制电机的转向和前。
方案论证:
小车的车体是整个智能小车的载体,在这个载体上,添加合适的控制单元以实现智能化,因此这个小车车体需要符合相关的设计要求。我们有以下两种方案可以考虑:
方案1:市场上存在很多不同型号的电动玩具小车,这种小车都有完整的车体和车轮以及电机和驱动电路。但是这种小车存在很多的缺点,由于是成品电动玩具车,一般都是装配紧凑,要想在其才车体上安装用于检测的传感器十分困难。还有就是这种小车一般采用的都是前轮转向后轮驱动的模式,不能方便迅速的进行原地90度或180度旋转。而且这种电动玩具车多为直流电机,力矩小,负载性能差,且不易调速,因此我们放弃了此方案。
方案2:买现成的车模。经过反复考虑论证,我们制定了买左右两轮分别驱动,后万向轮转向的车模方案。即左右轮分别用两个转速和力矩基本完全相同的直流减速电机进行驱动,后装一个万向轮。这样,当两个直流电机转向相反同时转速相同时就可以实现电动车的原地旋转,由此可以轻松的实现小车坐标不变的90度和180度的转弯。
综上考虑,本设计选择方案2。
本次设计采用STC89C52作为控制电路,把两个红外信号接到单片机上,通过单片机对信号的接收和处理,控制外围电路使小车转向,来避开障碍物。通过H桥驱动电路来控制电机的转向和前进。通过为微控制芯片对数据进行处理,处理速度远远满足小车的运行和避障的需求。也可以通过编写不同的程序,增加模块来增加小车的功能。它通过红外线传感器获知前方的障碍物情况,若不存在障碍物,小车直线前进;若左前方发现障碍物,左前放的红外传感器将信号传给单片机,单片机作出处理后控制小车向右转弯以躲开障碍物;若右前方发现障碍物,右前放的红外传感器将信号传给单片机,单片机作出处理后控制小车向左转弯以躲开障碍物;若正前方发现障碍物,则两个红外传感器将信号传给单片机,单片机作出处理后控制小车倒车至合适距离后,通过传感器传来的信号决定转弯方向,以躲开障碍物。检测使用的红外传感器是专业的红外避障传感器,当有障碍物时,它能够反映出电平高低的变化,而且更加廉价易得,适合简单的避障。系统总体设计方案图如图1所示。
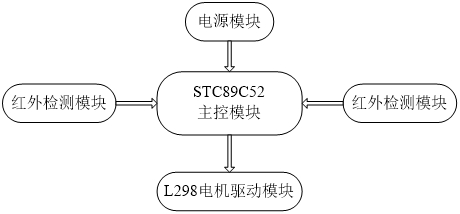
图1 系统总体设计方框图
根据系统方案设计,系统包括以下模块:STC89C52主控模块、L298N电机驱动模块、电源模块、红外检测模块等。各模块作用如下:
STC89C52主控模块,作为整个智能小车的“大脑”,将根据传感器的信号,控制算法做出控制决策,驱动直流电机等完成对智能小车的控制。
电源模块,为整个系统提供合适而又稳定的电源。
红外检测模块,检测障碍信号,为单片机提供前方道路信息。
电机驱动模块,驱动直流电机完成智能车的加减速和转向控制。
设计思路:
1.检测模块是小车自动避障的“眼睛”,它的存在至关重要,它为单片机提供障碍信号,为小车的运行提供参考数据。检测的方法很多,比如超声波检测、红外线检测等,综合考虑,红外线线检测更加实用,因此我们采用红外线检测,市场上有现成的红外E18-D50NK光电开关,完全符合我们本次设计的要求,且使用简单,因此我们采用这种红外避障传感器作为检测模块。
2.检测使用的红外传感器是专业的红外避障传感器,它通过红外线传感器获知前方的障碍物情况,若不存在障碍物,小车直线前进;若左前方发现障碍物,左前放的红外传感器将信号传给单片机,单片机作出处理后控制小车向右转弯以躲开障碍物;若右前方发现障碍物,右前放的红外传感器将信号传给单片机,单片机作出处理后控制小车向左转弯以躲开障碍物;若正前方发现障碍物,则两个红外传感器将信号传给单片机,单片机作出处理后控制小车倒车至合适距离后,通过传感器传来的信号决定转弯方向,以躲开障碍物。
3.本避障小车电路在硬件上采用了E18-D50NK红外光电开关组成的避障传感器来避障。由于采用了6节干电池供电使系统的抗干扰性得到加强。在软件上,充分利用了STC89C52的系统资源,使智能小车完美的实现了障碍物检测、避开障碍物自动巡航等功能。
|
