摘 要
机械化、智能化农业是21世纪农业生产方式的代表性变化,在新世纪要提高农业现代化水平必须积极地推进农业机械化技术创新。而水果种植业是现代农业的重要组成部分;果园的采摘机械是解决果园采摘作业难的有效手段。本文说明了果实机械化采摘的意义,详细介绍了国内外机械式采摘的发展历程、主要的采摘方式、采摘机械装置、系统组成,以及从采摘机器人机械手的设计、末端执行器的设计、行走装置的设计、果实的识别和定位方面分析了果实采摘机器人的国内外发展现状;并指出了我国果园采摘机械发展中存在的问题,最后分析了果园采摘机械的发展趋势。
本次设计从采摘的方式上入手,先是考虑剪切式采摘装置,之后是考虑抓取式采摘,参考水果的一些知识,并根据自己采摘水果的经验发现水果和一般的果实有不同之处。水果树枝条韧性大,果实主要分布在水果树枝条的前端,在较高的水果树面前使用抓拉式采摘装置最为方便实用。又考虑到可伸缩性,最后确定可伸缩性用铝合金管实现,。另外考虑到自动定位功能,动、定齿梳采用半圆形来实现。重点从定位、动力传送和可伸缩性等方面入手,利用Pro/e和AutoCAD软件,绘制三维图及二维图。
关键词:水果;采摘;采摘装置;高空采摘
Abstract
Mechanization and intelligent agriculture are the representative changes of agricultural production mode in the 21st century. In order to improve the level of agricultural modernization in the new century, we must actively promote the technological innovation of agricultural mechanization. Fruit planting is an important part of modern agriculture, and orchard picking machinery is an effective means to solve the problem of orchard picking. This paper explains the significance of mechanization of picking fruit, introduces in detail the development process of mechanical picking at home and abroad, the main picking methods, the picking mechanism, the system composition, and the design of robot manipulator for picking. Design of end Actuator, Design of Walking device, Analysis of Fruit Identification and location The development status of the fruit picking robot at home and abroad is also pointed out, and the development trend of the orchard picking machinery is analyzed.
This design starts from the way of picking, first consider the cutting-type picking device, then consider the grab-type picking, referring to some knowledge of the fruit, and according to their own experience of picking fruit and found that there are differences between the fruit and the general fruit. The fruit branch has great toughness and the fruit is mainly distributed in the front end of the fruit branch. It is most convenient and practical to use the grab pick-up device in front of the higher fruit tree. Also considering the scalability, the final determination of the scalability of aluminum alloy tubes,. In addition, taking into account the automatic positioning function, moving, fixed-tooth comb using semicircle to achieve. Focus on positioning, power delivery and scalability, etc. Three-dimensional and two-dimensional drawings were drawn with Pro/e and AutoCAD software.
Key words: fruit; picking device; High altitude picking
目 录
摘 要 I
Abstract II
1 绪论 1
1.1 选题背景及意义 1
1.2研究现状 1
1.2.1国外果园采摘机械现状 1
1.2.2国内果园采摘机械现状 4
1.2.3果园机械存在问题 5
1.2.4果园采摘机械的发展趋势 6
1.3研究主要内容 7
2 高空简易水果采摘装置原理 8
2.1 水果实采摘方式的选择 8
2.1.1高空简易水果采摘装置的采摘对象分析 8
2.1.2高空简易水果采摘装置原理简述 8
2.1.3便携式水果实采摘机械三维总装配图 9
3 高空简易水果采摘装置设计与计算 11
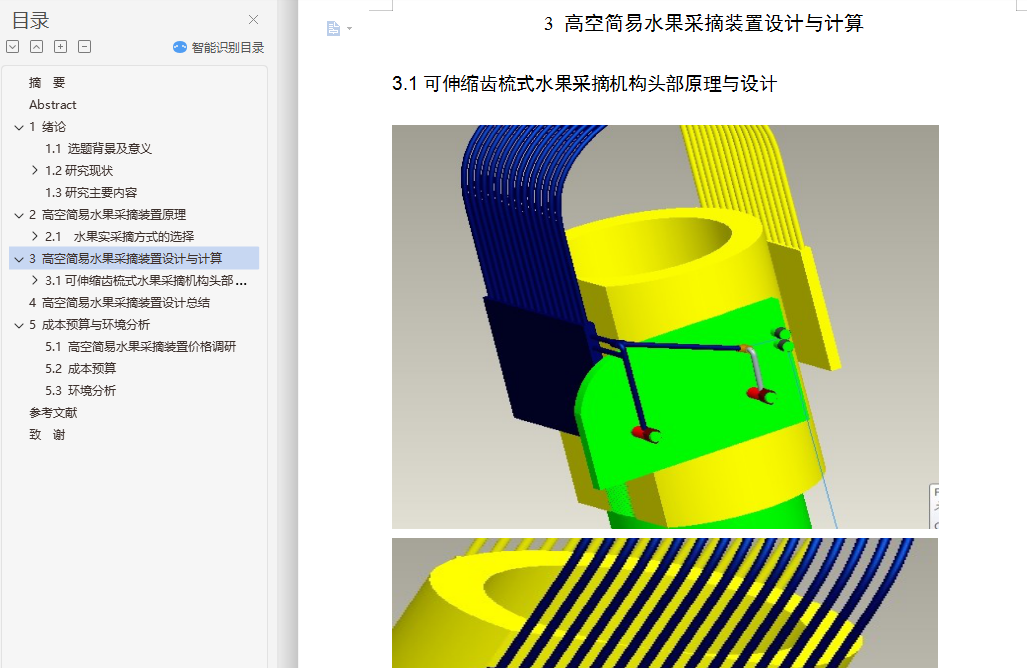
3.1可伸缩齿梳式水果采摘机构头部原理与设计 11
3.1.1可伸缩齿梳式水果采摘机构可伸缩原理与机构设计 12
3.1.2动力部分原理及计算 14
3.1.3动力部分机构设计与计算 14
3.1.4各个零配件材料的选择 14
4 高空简易水果采摘装置设计总结 16
5 成本预算与环境分析 17
5.1 高空简易水果采摘装置价格调研 17
5.2 成本预算 17
5.3 环境分析 19
参考文献 20
致 谢 22