摘 要
随着科技的发展,物料搬运装置在工业领域得到越来越广泛的运用,它可以帮助人们完成危险、重复的体力劳动,大大提高生产效率。
本课题对物料搬运装置的手爪、手腕、手臂、腰部和机座部分进行了设计,确定物料搬运装置采用圆柱坐标式。手爪的张合,手臂和腰部的伸缩,机座和手腕的旋转都采用气缸驱动。此物料搬运装置可以运用于工业流水线上,完成把指定物件从一个地方运送至另一地方的任务。物料搬运装置的系统控制由可编程序控制器完成,按照物料搬运装置的动作流程,完成了相应的接线图和程序编制。
关键词:物料搬运装置,工业领域,气缸,可编程序控制器
ABSTRACT
With the development of science and technology,the material handling device has been widely used in the industrial field. It can help people to accomplish dangerous,repeated manual work and greatly improve the production efficiency.
In this paper,the claw,wrist,arm,waist and base of the material handling device are designed,and the cylindrical coordinate is used for the material handling device. Claw tension,arm and waist extension,seat and wrist rotation are all driven by cylinders. This material handling device can be used in industrial assembly lines to complete the task of transporting specified objects from one place to another. The system control of the material handling device is completed by the programmable controller. According to the movement flow of the material handling device,the corresponding wiring diagram and program are completed.
Key words: material handling device,industrial field,cylinder,programmable controller
目 录
1 绪论 1
1.1 物料搬运装置的概述 1
1.2 物料搬运装置的发展史 1
1.3 气动技术及气动物料搬运装置的发展过程 2
1.4 物料搬运装置未来的发展趋势 3
1.5 本课题研究内容 6
1.6 课题研究的意义 6
2 物料搬运装置的总体设计方案 7
2.1 物料搬运装置的工作原理及系统组成 7
2.2 物料搬运装置基本形式的选择 8
2.3 驱动机构的选择 9
2.4 物料搬运装置详细设计参数 9
2.5 本章小结 9
3 物料搬运装置手部结构设计及计算 10
3.1 手部结构 10
3.2 物料搬运装置手爪设计计算 10
3.3 夹紧气缸的设计 12
3.4 手爪夹持范围计算 14
3.5 物料搬运装置手爪夹持精度的分析计算 15
3.6 弹簧的设计计算 16
3.7 本章小结 18
4 腕部的设计计算 19
4.1 腕部设计的基本要求 19
4.2 腕部的结构以及选择 19
4.3 腕部的驱动力矩计算 20
4.4 腕部工作压力的计算 21
4.5 气压缸盖螺钉的计算 22
4.6 动片和输出轴间的连接螺钉 23
4.7 本章小结 24
5 物料搬运装置手臂机构的设计 25
5.1 手臂的设计要求 25
5.2 伸缩气压缸的设计 25
5.3 导向装置 29
5.4 本章小结 29
6 物料搬运装置腰部和基座结构设计及计算 30
6.1 结构设计 30
6.2 控制手臂上下移动的腰部气缸的设计 30
6.3 导向装置 33
6.4 平衡装置 33
6.5 机身回转机构的计算 33
6.6 本章小结 34
7 物料搬运装置的PLC控制系统设计 35
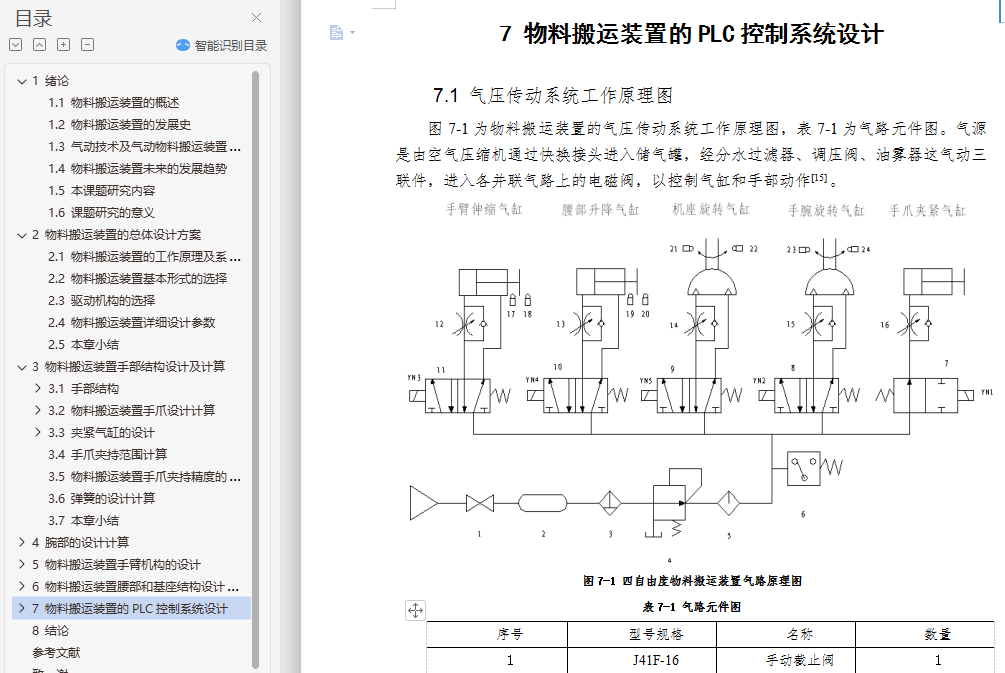
7.1 气压传动系统工作原理图 35
7.2 可编程序控制器的选择及工作过程 36
7.3 可编程序控制器的使用步骤 36
7.4 物料搬运装置可编程序控制器控制方案 37
7.5 本章小结 47
8 结论 48
参考文献 49
致 谢 50