柔性制造物料抓取及加工系统设计
摘 要
柔性制造加工环节中的并联机器人设计具有较强应用性,机械系统和控制器件较为复杂,尤其是应用在工业环境中,机械误差、信号干扰与电气之间的信号耦合较多,需要学生具有较高的机械设计能力与搭建低压电器控制电路的实践知识。
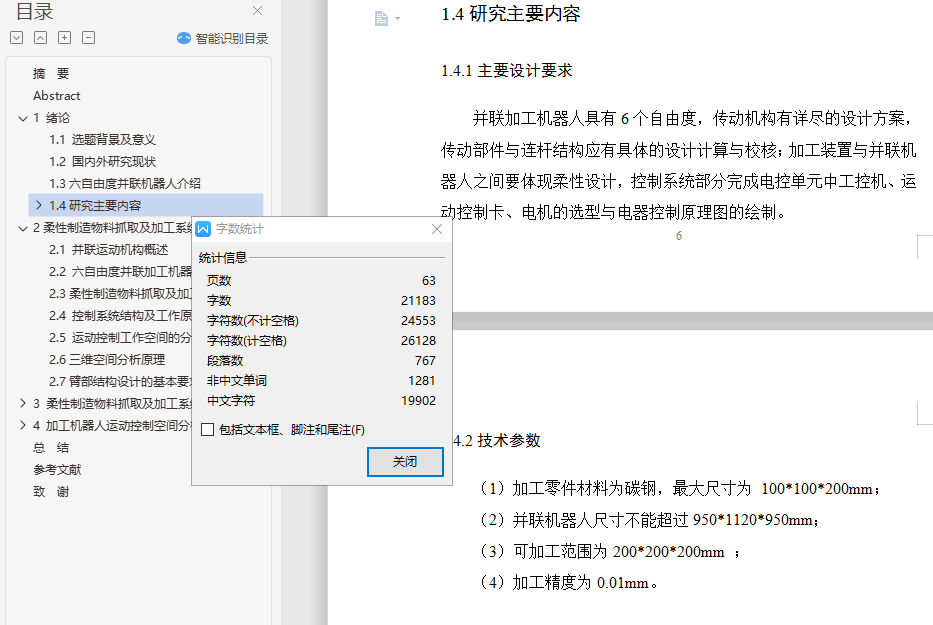
本次设计对柔性制造加工环节总体设计方案、并联加工机器人的机械与控制系统设计、系统中传动系统和驱动设备的选型以及计算;并联加工机器人具有6个自由度,传动机构有详尽的设计方案,传动部件与连杆结构应有具体的设计计算与校核;加工装置与并联机器人之间要体现柔性设计,控制系统部分完成电控单元中工控机、运动控制卡、电机的选型与电器控制原理图的绘制。
关键词:六自由度;并联加工机器人;运动控制卡;运动控制
Abstract
The design of parallel robot in the flexible manufacturing process has strong application. The mechanical system and control device are more complex,especially in the industrial environment,the mechanical error,signal interference and signal coupling between the electrical and the signal are more,especially in the industrial environment. Students are required to have high mechanical design ability and practical knowledge of building low-voltage electrical control circuit.
The overall design scheme of flexible manufacturing and machining links,the mechanical and control system design of parallel machining robot,the selection and calculation of transmission system and driving equipment in the system;Parallel machining robot has 6 degrees of freedom,transmission mechanism has a detailed design scheme,transmission components and linkage structure should be specific design calculation and verification;The flexible design should be embodied between the machining device and the parallel robot. In the part of the control system,the industrial control computer,the motion control card,the type selection of the motor and the drawing of the electrical control principle diagram of the electronic control unit should be completed.
Key words: six degrees of freedom;parallel machining robot;motion control card;clamping mechanism
目 录
摘 要 I
Abstract II
1 绪论 1
1.1 选题背景及意义 1
1.2 国内外研究现状 2
1.3六自由度并联机器人介绍 3
1.4研究主要内容 6
1.4.1主要设计要求 6
1.4.2技术参数 7
2柔性制造物料抓取及加工系统的结构及工作原理 8
2.1 并联运动机构概述 8
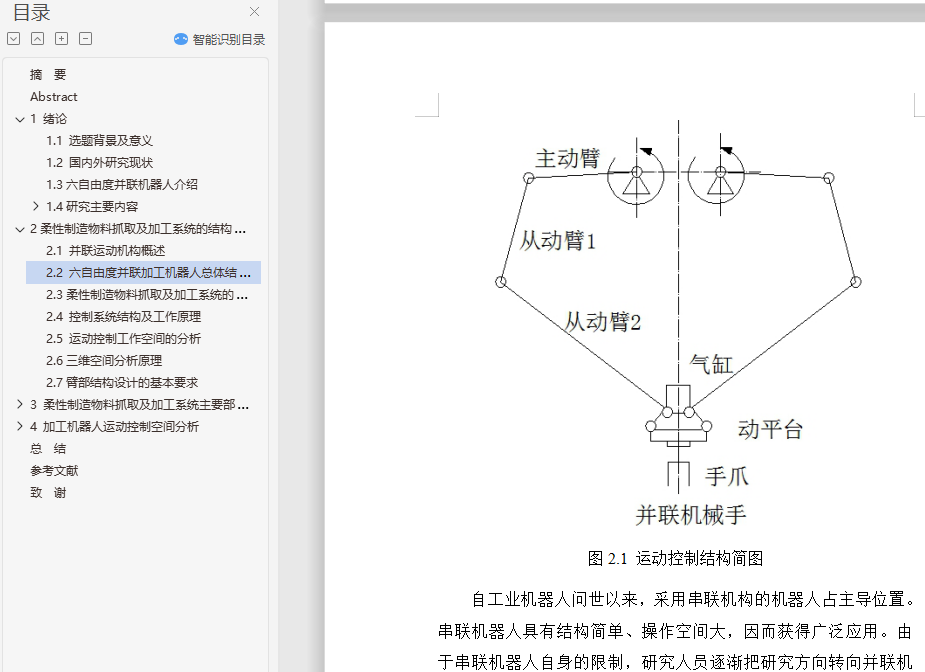
2.2 六自由度并联加工机器人总体结构原理 9
2.3柔性制造物料抓取及加工系统的总体结构 11
2.4 控制系统结构及工作原理 12
2.5 运动控制工作空间的分析 14
2.6三维空间分析原理 16
2.7臂部结构设计的基本要求 22
3 柔性制造物料抓取及加工系统主要部件的设计 25
3.1电动机选型 25
3.2电机的分类 26
3.3选择步进电机的计算 26
3.4传动结构形式的选择 30
3.5 轴承的寿命校核 32
3.6 手爪夹持器结构设计与校核 35
3.6.1手爪夹持器种类 35
3.6.2夹持器设计计算 36
3.7 夹持装置气缸设计计算 38
3.7.1 初步确系统压力 38
3.7.2气缸计算 38
3.7.3 活塞杆的计算校核 41
3.7.4 气缸工作行程的确定 42
3.7.5 活塞的设计 43
3.7.6 导向套的设计与计算 43
3.7.7 端盖和缸底的计算校核 44
3.7.8 缸体长度的确定 45
3.7.9 缓冲装置的设计 45
3.8 气压元件选取及工作原理 46
3.8.1 气源装置 46
3.8.2 执行元件 47
3.8.3 控制元件 48
3.8.4 辅助元件 50
3.8.5 真空发生器 51
4 加工机器人运动控制空间分析 52
4.1加工机器人运动控制的运动学约束 52
4.1.1 连杆杆长约束 52
4.1.2 运动副转角约束 52
4.1.3 连杆杆间干涉 53
4.2 确定运动控制空间的基本方法 53
总 结 55
参考文献 56
致 谢 58