机械手的机械和控制系统
文章来源: Dirk Osswald, Heinz Wörn. Department of Computer Science , Institute for Process Control and Robotics (IPR).,Engler-Bunte-Ring 8 - Building 40.28.
摘要: 最近,全球内带有多指夹子或手的机械人系统已经发展起来了, 多种方法应用其上,有拟人化的和非拟人化的。不仅调查了这些系统的机械结构,而且还包括其必要的控制系统。如同人手一样,这些机械人系统可以用它们的手去抓不同的物体,而不用改换夹子。这些机械手具备特殊的运动能力(比如小质量和小惯性),这使被抓物体在机械手的工作范围内做更复杂、更精确的操作变得可能。这些复杂的操作被抓物体绕任意角度和轴旋转。本文概述了这种机械手的一般设计方法,同时给出了此类机械手的一个示例,如卡尔斯鲁厄灵巧手Ⅱ。本文末介绍了一些新的构想,如利用液体驱动器为类人型机器人设计一个全新的机械手。
关键词:多指机械手;机器人手;精操作;机械系统;控制系统
1. 引言
2001年6月在德国卡尔斯鲁厄开展的“人形机器人”特别研究,是为了开发在正常环境(如厨房或客厅)下能够和人类合作和互动的机器人系统。设计这些机器人系统是为了能够在非专业、非工业的条件下(如身处多物之中),帮我们抓取不同尺寸、形状和重量的物体。同时,它们必须能够很好的操纵被抓物体。这种极强的灵活性只能通过一个适应性极强的机械人手抓系统来获得,即所谓的多指机械手或机器人手。
上文提到的研究项目,就是要制造一个人形机器人,此机器人将装备这种机器人手系统。这个新手将由两个机构合作制造,它们是卡尔斯鲁厄大学的IPR(过程控制和机器人技术研究院)和c(计算机应用科学研究院)。这两个组织都有制造此种系统的相关经验,但是稍有不同的观点。
IPR制造的卡尔斯鲁厄灵巧手Ⅱ(如图1所示),是一个四指相互独立的手爪,我们将在此文中详细介绍。IAI制造的手(如图17所示)是作为残疾人的假肢。
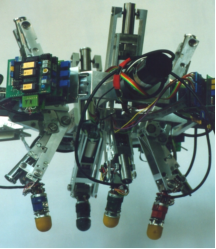


图1.IPR的卡尔斯鲁厄灵巧手Ⅱ 图2. IAI开发的流体手
2. 机器人手的一般结构
一个机器人手可以分成两大主要子系统:机械系统和控制系统。
机械系统又可分为结构设计、驱动系统和传感系统,我们将在第三部分作进一步介绍。在第四部分介绍的控制系统至少由控制硬件和控制软件组成。
我们将对这两大子系统的问题作一番基本介绍,然后用卡尔斯鲁厄灵巧手Ⅱ演示一下。
3. 机械系统
机械系统将描述这个手看起来如何以及由什么元件组成。它决定结构设计、手指的数量及使用的材料。此外,还确定驱动器(如电动机)、传感器(如位置编码器)的位置。
3.1 结构设计
结构设计将对机械手的灵活度起很大的作用,即它能抓取何种类型的物体以及能对被抓物体进行何种操作。设计一个机器人手的时候,必须确定三个基本要素:手指的数量、手指的关节数量以及手指的尺寸和安置位置。
为了能够在机械手的工作范围内安全的抓取和操作物件,至少需要三根手指。为了能够对被抓物体的操作获得6个自由度(3个平移和3个旋转自由度),每个手指必须具备3个独立的关节。这种方法在第一代卡尔斯鲁厄灵巧手上被采用过。但是,为了能够重抓一个物件而无需将它先释放再拾取的话,至少需要4根手指。
要确定手指的尺寸和安置位置,可以采用两种方法:拟人化和非拟人化。然后将取决与被操作的物体以及选择何种期望的操作类型。拟人化的安置方式很容易从人手到机器人手转移抓取意图。但是每个手指不同的尺寸和不对称的安置位置将增加加工费用,并且是其控制系统变得更加复杂,因为每个手指都必须分别加以控制。对于相同手指的对称布置,常采用非拟人化方法。因为只需加工和构建单一的“手指模块”,因此可减少加工费用,同时也可是控制系统简化。
3.2 驱动系统
指关节的驱动器对手的灵活度也有很大的影响,因为它决定潜在的力量、精度及关节运动的速度。机械运动的两个方面需加以考虑:运动来源和运动方向。在这方面,文献里描述了有几种不同的方法,如文献[3]中说可由液压缸或气压缸产生运动,或者,正如大部分情况一样使用电动机。在多数情况下,运动驱动器(如电机)太大而不能直接与相应的指关节结合在一起,因此,这个运动必须由驱动器(一般位于机器臂最后的连接点处)转移过来。有几种不同的方法可实现这种运动方式,如使用键、传动带以及活动轴。使用这种间接驱动指关节的方法,或多或少地降低了整个系统的强度和精度,同时也使控制系统复杂化,因为每根手指的不同关节常常是机械地连在一起,但是在控制系统的软件里却要将它们分别独立控制。由于具有这些缺点,因此小型化的运动驱动器与指关节的直接融合就显得相当必要。
3.3 传感系统
机器手的传感系统可将反馈信息从硬件传给控制软件。对手指或被抓物体建立一个闭环控制是很必要的。在机器手中使用了3种类型的传感器:
1. 手爪状态传感器确定指关节和指尖的位置以及手指上的作用力情况。知道了指尖的精确位置将使精确控制变得可能。另外,知道手指作用在被抓物体上的力,就可以抓取易碎物件而不会打破它。
2. 抓取状态传感器提供手指与被抓物体之间的接触状态信息。这种触觉信息可在抓取过程中及时确定与物体第一次接触的位置点,同时也可避免不正确的抓取,如抓到物体的边缘和尖端。另外还能察觉到已抓物体是否滑落,从而避免物体因跌落而损坏。
3. 物体状态或姿态传感器用于确定手指内物体的形状、位置和方向。如果在抓取物体之前并不清楚这些信息的情况下,这种传感器是非常必要的。如果此传感器还能作用于已抓物体上的话,它也能控制物体的姿态(位置和方向),从而监测是否滑落。
根据不同的驱动系统,有关指关节位置的几何信息可以在运动驱动器或直接在关节处出测量。例如,如在电动机和指关节之间有一刚性联轴器,那么就可以用电机轴上的一个角度编码器(在齿轮前或齿轮后)来测量关节的位置。但是如果此联轴器刚度不够或着要获得很高的精度的话,就不能用这种方法。
3.4卡尔斯鲁厄灵巧手Ⅱ的机械系统
为了能够获得如重抓等更加复杂的操作,卡尔斯鲁厄灵巧手Ⅱ(KDHⅡ)由4根手指组成,且每根手指由3个相互独立的关节组成。设计该手是为了能够在工业环境中应用(图3所示)和操纵箱、缸及螺钉螺帽等物体。因此,我们选用四个相同手指,将它们作对称、非拟人化配置,且每个手指都能旋转90°(图4所示)。
鉴于从第一代卡尔斯鲁厄灵巧手设计中得到的经验,比如因传动带而导致的机械问题以及较大摩擦因数导致的控制问题,卡尔斯鲁厄灵巧手Ⅱ采用了一些不同的设计决策。每根手指的关节2和关节3之间的直流电机被整合到手指前部肢体中(图5所示)。这种布置可使用很硬的球轴齿轮将运动传递到手指的关节处。处在电机轴上的角度编码器(在齿轮前)此时可作为一个精度很高的位置状态传感器。

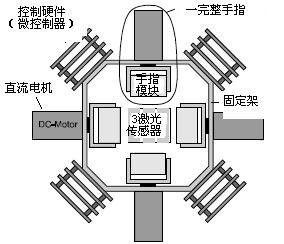
图3.工业机器人上的KDHⅡ 图4. KDHⅡ的顶视图
为了感知作用在物体上的手指力量,我们发明了一个六维力扭矩传感器(图6所示)。这个传感器可当作手指末端肢体使用,且配有一个球形指尖。它可以抓取较轻的物体,同时也能抓取3-5kg相近的较重物体。此传感器能测量X、Y和Z方向的力及绕相关轴的力矩。另外,3个共线的激光三角测量传感器被安置在KDHⅡ的手掌上(图5所示)。因为有3个这样的传感器,因此不仅可以测量3单点之间的距离,如果知道物体的形状,还能测出被抓物体表面之间的距离和方向。物体状态传感器的工作频率为1kHz,它能检测和避免物体的滑落。
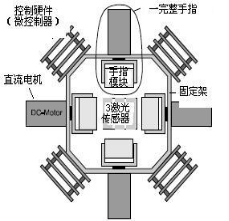
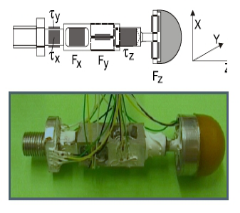
图5. KDHⅡ的侧视图 图6. 带应变计量传感器的六自由度扭转传感器
4. 控制系统
机器人手的控制系统决定哪些潜在的灵巧技能能够被实际利用,这些技能都是由机械系统所提供的。如前所述,控制系统可分为控制计算机即硬件和控制算法即软件。
控制系统必须满足以下几个的条件:
1. 必须要有足够的输入输出端口。例如,一具有9个自由度的低级手,其驱动器至少需要9路模拟输出端口,且要有9路从角度编码器的输入端口。如再加上每个手指上的力传感器、触觉传感器及物体状态传感器的话,则端口数量将增加号几倍。
2. 需具备对外部事件快速实时反应的能力。例如,当检测到物体滑落时,能立即采取相应的措施。
3. 需具备较高的计算能力以应对一些不同的任务。如可以对多指及物体并行执行路径规划、坐标转换及闭环控制等任务。
4. 控制系统的体积要小,以便能够将其直接集成到操作系统当中。
5. 在控制系统与驱动器及传感器之间必须要电气短接。特别是对传感器来说,若没有的话,很多的干扰信号将会干扰传感器信号。
4.1 控制硬件
为了应对系统的要求,控制硬件一般分布在几个专门的处理器中。如可通过一个简单的微控制器处理很低端的输入输出接口(马达和传感器),因此控制器尺寸很小,能轻易地集成到操纵系统中。但是较高水平的控制端口则需要较高的计算能力,且需要一个灵活实时操作系统的支持。这可以通过PC机轻易地解决。
因此,控制硬件常由一个非均匀的分布式计算机系统组成,它的一端是微控制器,而另一端则是一个功能强大的处理器。不同的计算单元则通过一个通信系统连接起来,比如总线系统。
4.2 控制软件
机器人手的控制软件是相当复杂的。必须对要对手指进行实时及平行控制,同时还要计划手指和物体的新的轨迹。因此,为了减少问题的复杂性,就有必要将此问题分成几个子问题来处理。
另一方面涉及软件的开发。机器人手其实是一个研究项目,它的编程环境如用户界面,编程工具和调试设施都必须十分强大和灵活。这些只能使用一个标准的操作系统才能得到满足。在机械人中普遍使用的分层控制系统方法都经过了修剪,以满足机械手的特殊控制要求。
4.3卡尔斯鲁厄灵巧手Ⅱ的控制系统
如在4.1节中所说,对于卡尔斯鲁厄灵巧手Ⅱ的控制硬件,采用了一种分布式方法(图7所示)。一个微控制器分别控制一个手指的驱动器和传感器,另外一个微控制器用于控制物体状态传感器(激光三角传感器)。这些微控制器(图7左侧和右侧的外箱)直接安装在手上,所以可以保证和驱动器及传感器之间较短的电气连接。这些微控制器都是使用串行总线系统和主控计算机连在一起的。这个主控计算机(图7、图8中的灰色方块)是由六台工业计算机组成的一个并行计算机。这些电脑都被排列在一个二维平面。相邻电脑模块(一台电脑最多有8个相邻模块)使用双端口RAM进行快速通信(图7中暗灰色方块所示)。一台电脑用于控制一个手指。另一台用于控制物体状态传感器及计算物体之间的位置。其余的电脑被安在前面提到的电脑的周围。这些电脑用于协调整个控制系统。控制软件的结构反映了控制硬件的架构。如图9所示。
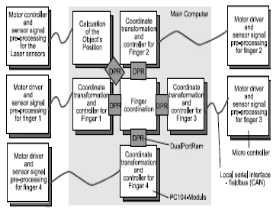
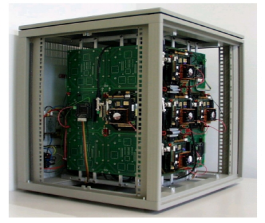
图7. KDH II的控制硬件构架 图8.控制KDH II的平行主计算机
一个关于此手控制系统的三个最高层次的网上计划正在规划。理想的物体位移命令可由优越的机器人控制系统得到,并可用作物体路径的精确规划。根据已产生的目标路径就可规划可行的抓取行为(手指作用在物体上的可行抓取位置点)。现在知道了物体的运动计划,就可以由手指路径规划得出每个手指的运动轨迹,并传递给系统的实时能力部分。如果一个物体被抓取了,那么其手指的运动路径就传递给了物体的状态控制器。这个控制器控制物体的姿态,它由手指和物体状态传感器所决定,用以获得所需的物体姿态。如果一个手指没有跟物体接触,那么它的移动路径将会直接传递给手控制器。这个手控制器将相关的预期手指位置传递给所有的手指控制器,以协调所有手指的运动。这些在手指传感器的帮助下又反过来驱动手指驱动器。
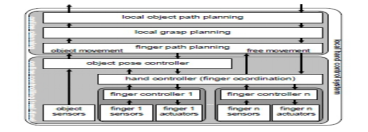
图9. KDHⅡ的手部控制系统
5. 实验结果
为了验证卡尔斯鲁厄灵巧手Ⅱ的能力,我们选择了两个要求操作问题。一个问题是在网上对处于外部影响下的被抓物体姿态(位置和方向)的控制。另一个问题是被抓物体必须能够绕任意角度旋转,这只能通过重抓才能实现。这可以反映卡尔斯鲁厄灵巧手Ⅱ对复杂任务的操作能力。
5.1 物体姿态控制
这个物体姿态控制器的目的是为了确定好被抓物体的位置和方向以适合给定的轨迹。此任务必须在实时条件通过在线获得,尽管有内部变化及外部干扰的存在。内部变化比如在物体移动过程中,球形指尖在被抓物体上的滚动。这种状况如图10、图11所示。这将导致物体的不必要的额外移动和倾斜。这些错误的物体姿势很难预先估计。因此,物体状态传感器的输入必须要修改这些错误。对于卡尔斯鲁厄灵巧手Ⅱ来说,其上的三个激光三角传感器就是用来纠正此种错误的。图12定量地说明了图9中物体在没有姿态控制情况下的倾斜情况。下图显示了在X方向上随时间推移的预期轨迹,而上图显示了物体实际的旋转(倾斜)结果情况。因为启用了物体状态控制,图13中的物体倾斜得到了很大的减少。上图物体的旋转保持基本恒定,这和期望的一样。

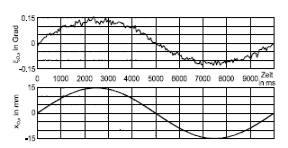
图10.因滚动产生的额外位移 图12.没有状态控制的物体倾斜
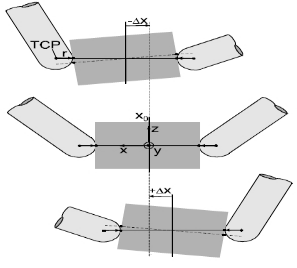
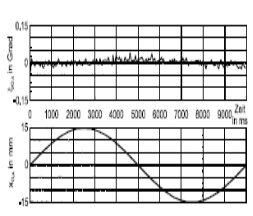
图11.因球形指尖在物体上的滚动而产生 图13.物体状态控制下减少的物体
额外的不期望倾斜情况 倾斜情况
物体状态控制器对补偿外界干扰也是十分必要的。比如,机器人(手臂、手或手指)或被抓物体与外界的碰撞可能导致物体的滑落。这更有可能导致被抓物体的损耗,这是不能出现的情况。为了能够避免物体在这种情况下的损失,就必须检测出物体的滑落并迅速采取行动以稳定物体的状态。
为了验证卡尔斯鲁厄灵巧手Ⅱ控制系统对这种干扰情况的处理能力,我们做了以下的实验:物件被抓后,将手指的接触力恒定减少直至物体开始滑落。在激光三角传感器检测滑落后,物体状态控制器采取措施将物体重新调控到所期望的位置。图14和图15展示了此种实验的一个例子。尤其是图14,它显示出物体滑落启动的相当突然且相当快。但是物体状态控制器也能够足够快地检测和补偿滑落,这样物体的位置(这里:特别是X方向,就是滑落的方向)和物体的方向能够与最开始的期望值很快地相符。
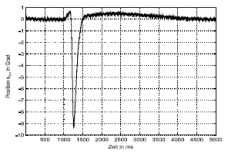
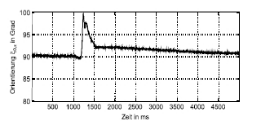
图14.滑落实验:X方向的实际物体 图15.滑落实验:关于Z轴的实际
位置 物体方向
5.2 重抓
虽然卡尔斯鲁厄灵巧手Ⅱ非常的灵活,但是它不能在第一次操作中就能得到每一个理想的对象操纵。这源于这样一个事实:手指相对于正常的工业机器人来说是十分小的,因此所具备的工作范围也是很有限的。如果物体被手指抓住,那么它第一次只能在所有手指的剩余空间内被操纵。可行操作的条件是所有的接触点必须长期地处在相联手指的工作范围内。这很大地限制了操作的可行性。为了能够克服此种限制,一个叫做重抓的操作就必须执行。即当一个接触点到达了相联手指的限制区域时,这个手指就必须从物体上脱离,并移到一个新的接触位置。这必须是多于3个手指的手才能使操作可靠。周期性的移动这些手指,就能使任意的操作变得可行。关于此种操作有一个例子,就是在大角度旋转被抓物体时,此时重抓动作很有必要。图16显示了卡尔斯鲁厄灵巧手Ⅱ在旋转一个螺帽状物体时的一系列图片。这个物体是绕它的垂直轴旋转的。在a到c图中所有的手指都跟物体接触,并且四个手指相互协调运动才使物体旋转。图d到图f显示了一个手指的的重抓动作。在d图中这个手指已经运动到其工作范围的极限位置,这时所有手指的协调运动也被终止。左前方的手指脱离物体并单独移动到另一个接触点。在图f中这个手指重新跟物体接触,另一个手指此时可以重新定位(没有显示)。所有的手指重新定位之后,协调旋转运动继续进行。视具体情况而定,卡尔斯鲁厄灵巧手Ⅱ也可以同时进行几个手指的重抓动作。这可以加速重抓过程,但是只能是被抓物体与外界接触的条件下才有可能。比如说螺丝钉上的螺帽或孔里的一挂钩。图17显示了卡尔斯鲁厄灵巧手Ⅱ将一个木柱从一个平方的基座孔内拉出来的一系列图片。图a到图b显示木柱被拉出一半,然后左手指和右手指在同一时刻脱离物体并重新定位(图c到图e)。那之后,前面与后面的手指也重新定位(图f)。那之后,整个木柱被拉出,从而可进行进一步的操作(没有显示)。
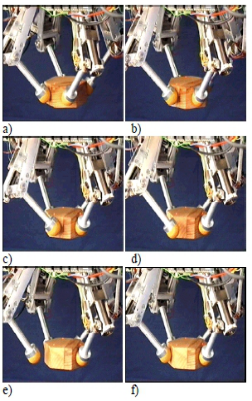
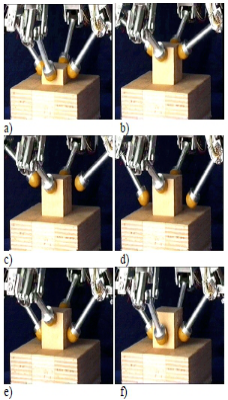
图16.利用重抓旋转螺帽状物体 图17.利用重抓从孔中拉出木柱
6.结论
为了使机械手能够完成灵活精确的操作,一合适的机械系统和控制系统是必需的。这些介绍的标准是必需加以考虑的,正如文中所说。卡尔斯鲁厄灵巧手Ⅱ表现的非常成功。这种机械手能够抓取很大范围的不同形状、尺寸和重量的物体。被抓物体的姿态也能可靠地加以控制,即使在外部干扰的情况下。此外,由于此系统,复杂的精细操作(如重抓)也能实现。在人行机器人的特殊研究领域,基于一个不同的概念叫做流体化(图2所示)的基础上,小型机械手也具有拟人化和机械化。这概念是由卡尔斯鲁厄研究中心的IAI所提出的。但是,这个控制软件的主要结构可经过相应修改而为此种小型机械手所用。
