前 言
随着科技的发展以及人们对机器人的工作要求不断提高,常见的轮式、足式机器人在某些环境中已经无法满足要求。因此,人们提出了一种新型机器人--全向球形机器人。球形机器人具有良好的动态和静态平衡性,运动方向可控性好,一旦运动失态也能很快自我恢复;球形机器人具有适应能力强的特点,它能在无人、沙尘、潮湿等恶劣环境中运行,无论是光滑、或是粗糙、还是柔软的地形,都不会影响其灵活性;且球形机器人的能耗低,由于它在滚动运行过程中受到的阻力小,能量的消耗相对较低,可用于长时间操作的领域。
目前,国内外越来越多的学者开始重视球形机器人的研究,而众多研究的重点则集中在驱动装置和控制方法两个方面。
主 体
1.国外发展情况
国外对球形机器人的研究与我国相比较早,已有十几年的历程,最早的研究是从芬兰赫尔辛基科技大学的海尔姆教授开始,随后,美国、日本、瑞典等国家也相继开展了球形机器人的研究,就目前的研究成果来看,国外的技术相对成熟。
1.1球形机器人Spherical Mobile Robot
1996年Aarne Halme等人研制出了第一台具有真正意义上的球形运动机构--Rollo。它的驱动方式由主动轮和被动轮组成,主动轮位于球形内部,被动轮处于另一侧,并带有弹簧装置。主动轮和被动轮均与球壳直接接触,主动轮围绕安装轴与主轴旋转,其他组件安装在与主轴固定连接的圆台上,这样既增大了球壳与主动轮之间的压力,也可以正价运动时主动轮与球壳的摩擦力,主动轮通过绕安装轴转动来使机器人向前移动,在围绕主轴转动的过程中,驱动单元产生的惯性力通过摩擦传递到球壳,从而实现机器人的转向,这种驱动称为转动体驱动。球体的球壳是由有机玻璃或其它相似的材料制成的,以保证球体内部构件能够与外部控制部分进行无线电通讯联系。图1和图2分别是Halme研制的球形运动机器人(Spherical Mobile Robot)的内部结构简图及Pro/e模型图。
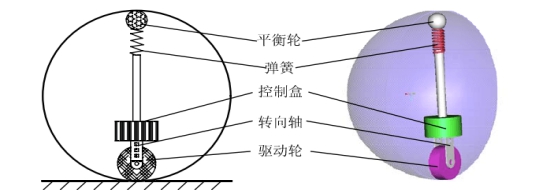
图1 球形移动机器人结构图 图2 球形移动机器人三维图
1.2球形机器人Sphericle
1997年,意大利比萨大学的Antonio Bicchi推出了白行设计的球形机器人“Sphericle”。这种机器人具备球-车运动系统,即在球体的内部放置一个四轮小车,小车上装有各种传感器、蓄电池、电动机和控制系统,这些设备构成了配重质量块,增大了车轮和球壳之间的摩擦力,机器人前进靠车轮的同步转动来实现,机器人转向靠车轮差速转动来实现,这种驱动称为车驱动。这种机器人可以连续运动,但是其适应能力具有一定的局限性,例如当球体的运动轨道不够平坦时,由于颠簸和振动使小车的车轮和壳体之间产生间隙,就会使机器人偏离运动轨迹;当车轮转速过快时,壳体与车轮间出现滑动现象也会影响机器人的运动速度;而当球体与物体发生碰撞时,小车一旦与球体分离,机器人就会失去运动的动能。在运动分析上,是将平面—球系统模型与独轮车系统模型进行叠加来进行的。“Sphericle”的原始图片和Pro/e模型如图3、4所示。
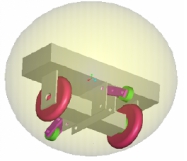
图3 “Sphericle”球面图 图4 “Sphericle”三维图
1.3球形机器人Spherical Rolling Robot
球形滚动机器人是Shourov Bhattacharya和Sunilk.Agrawal在2000年提出来的。它的外壳采用铝合金材料,由上、下两个半球壳组成。在每个半球壳内部均包含有接收器、电机设备、转子和蓄电池,电池安装在电机转子轴上。它的驱动系统是由两个互相垂直的转子构成的。电机和电池的把持装置通过螺栓安装在球壳上。球体外表面有六个十字形的标记,这些标记是为了让安装在空中的摄像机对球形滚动机器人进行定位。球体内的各部件对称分布,这样,保证了机器人的质心位于球体几何形心。有效地防止了球体发生翻转。图5是球形滚动机器人的两张图片资料。
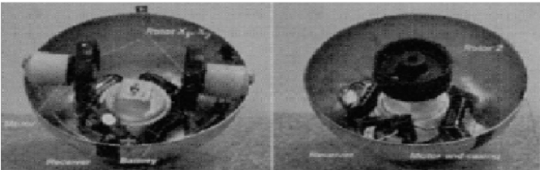
图5 Sphedcal rolling robot模型图
1.4 全方位球形运动机器人August
Amir Homayoun Javadi A.和Puyan Mojabi在2002年开发了一种全方位球形运动机器人,Javadi和Mojabi等人将它命名为“August”。这种球形机器人的驱动方式为移动质量块驱动,也称为四驱动球形机器人。它能够全方位移动,由蓄电池供电,控制系统由球心和球壳两部分组成,通过无线电控制机电系统来完成运行和操作。之所以叫做四驱动机器人,是因为August由四个质量块和四个传动螺杆构成,并且每根螺杆各有一套独立的驱动系统,每个质量块靠步进电机的驱动力在导轨上移动。由于质量块的移动使机器人整体重心的位置得到了改变,机器人就通过这种偏心力矩的作用原理向前移动。后来Ranjan Mukherjee等人设计了一种Spherobot球形机器人的基本结构,Spherobot采用的驱动方式也是移动质量块驱动方式,但是并没有做出实体样机,只是建立了这种机器人的数字模型、研究了这种机器人的路径规划方法。通过对移动质量块驱动的不断研究,这种驱动方式能够实现球形机器人的全方位行走,但是通过控制四个配重块的协调移动来实现全向行走的难度相当大。同时配重块在球壳内部的分布方式影响了驱动力矩的质量,进而影响了机器人运动速度。August结构如图6所示

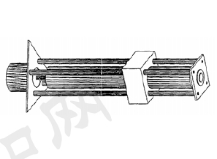
图6 August结构图
1.5 Ball--shape Robot
从1995—2002年,A.Bicchi等人先后生产了近十球体的外部被喷涂成蓝色,有两条正交的红色条形带环绕在球体上,这些记号都是用来对球体进行定位的。August的控制系统是由一个便携式的摄像机安装个系列的种球形机器人,最新型的球形机器人的外壳上采用透明的材料,两个半球壳在中间支撑部分进行连接,内部的驱动单元的质心位于球体形心的正下方,机器人的各种运动功能通过两个电机的工作来实现。机器人的各种运动功能通过两个电机的工作来实现,其模型及主体的驱动部分rIDU一5如图7、8所示

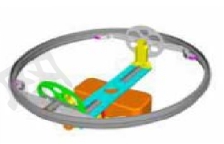
图7 球形机器人原型 图8 IDU.5的三维模型
1.6 Roball
Roball(如图9所示)代表了一类用于娱乐和家庭服务功能的球形机器人。当Roball遇到四种不同的情况时采取相应的滚动速度和运动方向,依照优先权来分这四种情况,依次是突发事件、旋转、直行和巡航。通过语音系统,在遇到不同的情况时,可以发出各种声音或者播放不同的音乐,以增加和孩子的交流能力。与Roball相似,日本的索尼公司生产的Sony Robot(如图11所示)球形机器人,也是主要用于家庭使用。在家庭环境的有限空间中,它具有安全和可操作性强的特点。
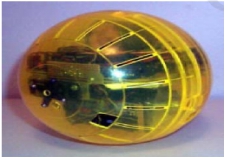
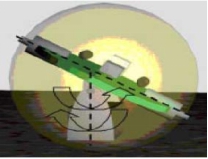
图10 Roball的原型 图11 SonyRobot的原型
2.国内的情况
国内球形机器人研究较晚,但是发展速度很快,其中国内高校对球形机器人的研究做出了杰出的贡献。
2.1球型智能运动单元
北京航空航天大学机器人研究所设计了一种新型月球探测车运动机构一球型智能运动单元(SphericalSmart Moving Unit),该单元将机构、电机、驱动器和控制器集成密封在一个球形的壳体内。它采用内部驱动的方式来控制球体的运动,依靠陀螺力来获得它的动态稳定性。球型智能运动单元可以通过无线或有线的通讯方式接收外部的运动指令,也可以做自主运动,它具有前进、后退、左转或右转等运动功能。该球型智能运动单元既可以作为一个独立的运动实体,也可以作为车轮机构构成一个多轮驱动的月球探测车。
2.2北京邮电大学研制的球形机器人
北京邮电大学研制了一种球形机器人,球形机器人实物如图12所示。该球形机器人通过调整和改变重心位置而产生的驱动力矩来实现机器人的滚动。其运动的具体实现是通过两个电机分别驱动两组齿轮传动机构,从而带动相应的配重块向期望的方向偏转,以改变其重心位置,最终使得整个球体向期望的方向移动。同时,通过调节其重心向两边偏斜,可以产生实现机器人转向功能时所需要的力矩。
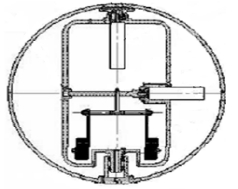
图12 球形机器人内部结构图
2.3哈尔滨工业大学研制的“球形运动器”
哈尔滨工业大学宇航与空间机构研究所早在2002年便对球形机器人进行了研究,设计制造了一种名为“球形运动器”的装置。该运动器是轴线共线的两个电机来进行控制的,分别实现运动器的驱动和转向两种运动方式。球体直径350mm,整机重量6.6kg,驱动质量1.05kg,驱动半径R89.5kg。该球形运动器结构简单,重量轻,力学性能良好。具体实物如图13所示。

图13 球形运动器实物图
总 结
在国内外学者的研究下,球形机器人的发展较为迅速,研发出了多种不同的驱动方式。这些驱动方式都有各自的特色,但是现在的驱动装置还是存在着一些不足之处:首先,球体内无法提供一个相对稳定的平台;其次,这些方案的驱动机构是相互关联的,形成了约束和限制,无法实现真正的平面无条件自由运动。本文针对这一缺陷,希望能在小车驱动的基础上改进使球形机器人实现任意方向的运动,从而实现更加有效的运用。
参考文献
[1]江洁.内外驱动兼备的球形机器人设计及性能分析[D].西安:西安电子科技大学,2010
[2]赵勃,孙立宁,李满天.球形机器人研究综述[J].机械与电子.2010.9(09),65-70
[3]张义刚.一种球形机器人的运动规划和控制研究[D].西安:西安电子科技大学,2006
[4]林星陵.一种新型球形机器人的结构设计[J].组合机床与自动化加工技术.2015.5[5]104-107
[5]马国静.全方位移动机器人的运动控制研究.机构学与机器人技术.2015.3
[6]廖欢欢.球形机器人运动控制研究.哈尔滨工业大学,2011.6
[7]赵勃.同轴双偏心质量驱动球形机器人系统建立及运动控制研究.哈尔滨工业大学,2011.10
[8]岳明.双驱动球形机器人及其运动控制的研究.哈尔滨工业大学,2008.5
[9]邓宗全.球形机器人的发展概况综述.哈尔滨工业大学.
[10]刘家念.球形机器人未来发展方向研究.科技创新与研究第18期.2015
