|
2、国内外发展情况(文献综述)
2、1清洁机器人研究现状
清洗机器人是一种机械设备,它可以沿管道内壁行走,它可以携带一种或多种传感器以及操作装置(如CCD传感器,超声波传感器,位置传感器,简单的操作机械手,防腐喷漆装置以及本课题用的雨刷清洗装置等),一系列的管道检测和清洗作业通过操作人员的操作来进行。移动载体,基于计算机视觉的定位检测系统,动力传输系统和信号传递及驱动控制系统组成了一个完整的管道清洗机器人系统,其中驱动控制系统是管道清洗机器人的核心部分。在管道机器人技术方面,美国,英国,德国,日本等发达国家已做了大量的工作,取得了比较好的成绩。据统计,国际上生产管道清洗机器人的公司不少于20家,如美国的Nicro与Vsi,加拿大的Airtox,英国的Indoor,丹麦的Danduct,瑞典的Wintclean,韩国的Hanlim等。
相较于国外,我国管道清洗机器人的研究和制造要晚一些,随着科技的发展和人民生活水平的提高,诸如空调,油烟机等电器使用的越来越多,并且自2003年之后,我国民众和餐饮业开始关注空调,油烟机的安全卫生,人工清洗难度大且往往洗不干净,市场对管道清洗机器人产品的需求越来越大,政府部门,社会以及商家也更重视这一产业的发展。
2004年中科院兰州分院研制成功我国第一台管道清洗机器人,据介绍,研究人员是按照400MMx400MM规格的空调的通风管道来设计的清洗机器人的样机,具有的功能如下:①可以在管道中行走;②可以观察管道内污染的情况;③可以清洁管道内的污染物I_刀。随后国内管道清洗机器人行业取得了较快的发展,国内一些科研院所和重点高校已经设计并生产出较先进的成套的管道清洗机器人设备,如清华大学,浙江大学,哈尔滨工业大学,深圳大学,东华大学等,并取得了较好的成果。
2、2驱动电源研究现状
驱动电源作为整个电子设备的“心脏”,其性能的好坏与设备的运行情况有着必然的联系。电源从线性电源发展到今天的开关电源,广泛的应用于航空、军事、工业、自动化、农业等领域。根据拓扑结构的不同可将驱动电源分为两大类:直流放大式驱动电源(有时也称线性电源)和直流变换式驱动电源(有时也称高频开关电源)。
1、直流放大式压电驱动电源
直流放大式驱动电源是指调整管工作在线性状态下的稳压电源,稳定输出电压靠深度负反馈作用在电路中实现,特点主要是稳定性好、可靠度高、输出电压的纹波小。主要有电压型驱动电源与电流型驱动电源两类。
1)电压型压电驱动电源
此拓扑结构具有频响范围较宽,输出纹波小等特点,将高压放大电路与功率放大电路以及及反馈保护电路集成一体,在压电陶瓷驱动电源中应用较为广泛,基本原理如图1.5所示(王永红等,2013。如李福良等应用APEX公司推出的PA系列高压运放芯片为主芯片设计驱动电源驱动压电陶瓷微运动(李福良,2004);张铁民等也运用此系列高压运放芯片为基础设计成可宏/微转换的驱动系统驱动压电直线电机(张铁民等,2015)。
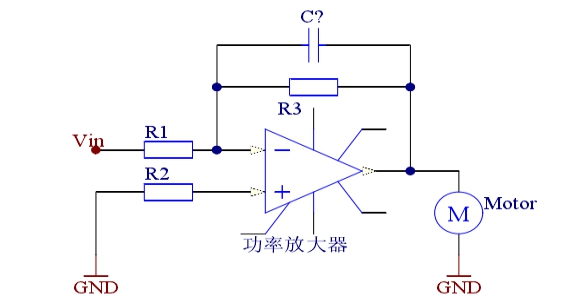
图1.5电压型压电电源原理图
2)电流(电荷)型压电陶瓷驱动电源
电流(电荷)型驱动电源(董维杰等,2002),主要是利用其压电陶瓷的位移量与其所带的自由电荷量成线性关系,在单位时间内对充电电流进行积分算得电流(电荷)量进行反馈控制,也可由积分放大器反馈得到,相应原理如图1.6和图1.7所示,电路中有电荷(或电流量)反馈电路(陈立国等,2006)。但由于压电陶瓷是电容性负载,工作时会出现电荷泄露现象影响其控制精度,在静态定位控制中效果不好。根据不同的应用场合和需求,国内外很多厂商己经研制出许多相应的压电陶瓷驱动器,如德国PI公司、美国Kinetic Ceramics Lnc公司、美国RHK公司、美国Columbia公司、德国Dynamic structures & Materials公司等。
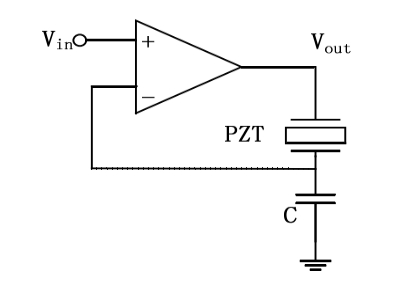
图1.6电流型驱动电源原理图
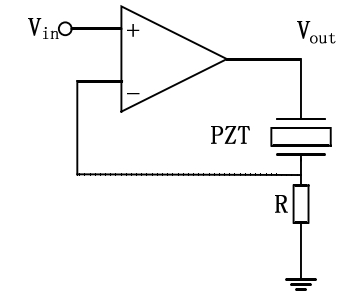
图1.7电荷型驱动电源原理图
2、直流变换式驱动电源
随着电源技术的不断发展,对电源的小型化、轻便化提出了更高的要求,因此,以高频化为主要特点的开关电源进入工程师们的视线,并很快在工业、农业、航空等领域中广泛的应用。开关电源是利用现代电力电子技术,控制开关晶体管开通和关断的时间比率,维持稳定输出电压的一种电源,开关电源一般由脉冲宽度调制(PWM控制IC和MOSFET构成。该类型驱动电源损耗较小且有较多纹波,频响范围窄。阮新波等以半桥电路作为主驱动电路,采用软开关技术对电路进行改善,实现对超声电机的控制;德国Saarland大学过程自动化实验室给出了一种基于PWM开关型的压电驱动电源,可在负载为2.2uF等效电容情况下,输出电压达到800V瞬时输出电流为0.75A(张磊,2014)。

图1.8双极性PWM原理图
本实验所研究的宏微驱动直线电机集宏/微机械结构于一体,具有体积小,结构设计灵活,定位速度高等特点,因此要求驱动电源既要能够实现同时驱动宏/微运动,实现小型化,又要完成对压电电机的运动状态进行精密控制。综合各种驱动方式的优缺点,本论文主要以直流变换式技术为基础,并结合整流调压的技术,以DSP为核心控制器,设计驱动电源控制器,以实现对精密定位平台进行精密的定位控制。
|

