(微电机控制电路)
,
题目名称:微电机驱动电路设计
摘要:本微电机驱动电路装置是以H桥驱动电路为核心,使用两个S9013三极管作为前级驱动,H桥采用两个TIP42和两个TIP41功率三极管,每个时刻是两个功率管导通,从而实现微电机的正反转,以及停止电机,同时在电机两端并联瓷片电容,避免谐波的影响,是电机稳定运行。用LM317将12V调至5V,给单片机供电,同时采用51单片机STC89C52的IO口来控制微电机的正反转和停止,本装置还可以实现任意位置定位,将电位器与电机轴同轴捆绑,变阻器两端接5V,触头送入单片机AD采集,通过PID算法,实现微电机的精准定位,而且本电机还加入的电流电压保护电路,实现最整个装置的保护。
The micro motor drive circuit device using H bridge driving circuit as the core,using a two S9013 transistor as former driver, H bridge with two TIP42 and two TIP41 power transistor, each moment is two power tube, so as to realize inversion of micro motor, and stop the electric machine, at the same timer the two ends of the motor shunt ceramic capacitors, avoid the influence of harmonic, stable operation of motor. At the same time using 51 enhanced MCUSTC89C52 IO port to control rotating micro motor and stop, the device also can realize positioning at any position, the and the motor shaft bundle, rheostat ends 5V, contact into the micro AD acquisition,through the PID algorithm, the real positioning precision micro motor, and them is the addition of current and voltage protection circuit, protection to achieve the whole device.
关键字:S9013 TIP41 TIP42 STC89C52 TLV2543 REF5040 INA271 LM317
题目名称:微电机驱动电路设计 1
1、 方案论证与比较 3
1.1、驱动部分核心电路方案 3
1.2、降压变换电路 3
1.3、微电机与电位器的选择 3
1.4、保护电路部分 4
1.5、CPU控制器件的选择 4
1.6、AD采集器件的选择 4
2、 系统设计 5
2.1、总体设计 5
2.2、单元电路设计 6
3、作品性能测试与分析 11
3.1、系统测试设备 11
3.2、系统测试方法与数据 11
4、附录一:部分电路原理图 13
5、附录二:PCB电路板 15
1、方案论证与比较
1.1、驱动部分核心电路方案
方案一:驱动部分采用三极管直接驱动电机,四个三极管组成H桥,轮流导通,直接用4个IO口控制电机的转动。
方案二:驱动电路采用H桥驱动电路,H桥有功率三极管组成,前级接入三极管构成两级驱动,由2个单片机IO口控制电机的正反转和停止。
通过方案论证与比较:可以发现两个方案都有涉及到H桥,但方案一直接用单片机IO口驱动三极管,由于单片机拉电流很低,可能无法驱动H桥,故方案一不可行,方案二采用了两级驱动,而且使用了功率三极管,即使电流上升到200MA,功率三极管性能也很好,而且具有较强的驱动能力,故选择方案二。
1.2、降压变换电路
方案一:采用LM7805稳压器将12V降为5V给单片机供电。
方案二:采用LM317可调稳压器结合电位器将12V降为5V,给单片机和AD芯片供电。
方案三:通过降压斩波电路降压。
通过方案论证与比较:方案一虽然可以将12V稳定降至5V,但由于输入与输出压差过大,使得LM7805转换效率较低,发热严重,造成能源浪费,方案三虽然降压效率比较高,但是电路比较复杂,输出电压不稳定,方案三功率较高,也比较好调节,比较稳定,电路结构比较简单,故选择方案二。
1.3、微电机与电位器的选择
方案一:采用异步电机或普通直流电机。
方案二:采用减速直流电机。
通过方案论证与比较:方案一中步进电机控制复杂,而且不利于控制正反转,普通直流电机转速太大,不易于定位,而且转矩较小,容易堵转,造成电流过大,烧毁电机;方案二中减速直流电机转速很慢,转矩很大,便于定位,电位器采用高精度多圈旋转电位器;故旋转方案二。
1.4、保护电路部分
方案一:通过程序来保护电路。
方案二:通过硬件电路切断电源来保护电路。
通过方案论证与比较:方案一通过程序保护电路不够全面,而方案二可以通过继电器来及时切断整个电路的供电电源,保护整个电路。
1.5、CPU控制器件的选择
方案一:采用单片机来控制电路,如89C52、12C5A60S2
方案二:采用现场可编程门阵列FPGA控制整个电路。
通过方案论证与比较:方案一可以采用增强型单品机提高整个系统的运行速度,比较容易控制,而且器件价格合适,而方案二中FPGA虽然性能很好,但价格高,故单片机相对较合适,选择方案一。
1.6、AD采集器件的选择
方案一:采用普通AD采集器件,比如PCF8591
方案二:采用TI公司的TLC2543结合REF5040采集电压。
通过方案论证与选择:现在高速AD采集器件TLC2543。
2、系统设计
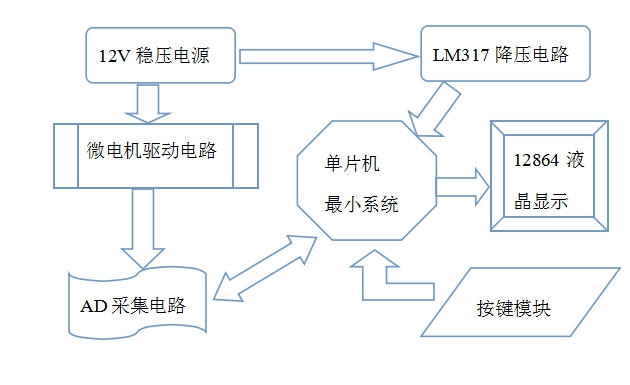
2.1、总体设计
本微电机驱动电路装置是以H桥驱动电路为核心,采用的分立元件构成的电路,从单片机出来的高低电平信号驱动9013三极管,H桥作为后级驱动电路,四个功率TIP42、TIP41三极管组成H桥,当实现正反转时的任意时刻,上下各有一个三极管导通,构成回路驱动电机转动,驱动电流能力也比较强,同时在驱动电路加入采样电阻,通过IAR271仪表放大,送入单片机监测电流;另一方面,将直流12V通过LM317可调降压电路降为5V给单片机供电,将微电机与电位器同轴相连,5V加在电位器两端,电位器触头通过电阻分压送入单片机检测,通过PID算法调节电机转动使得电位器停在任意设定的位置,这样便实现了微电机的任意位置定位。
2.2、单元电路设计
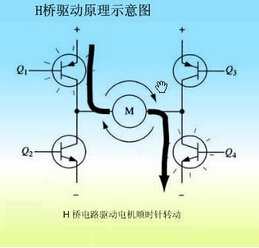
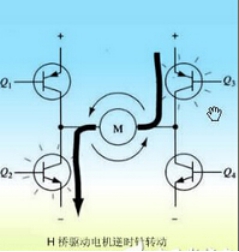
2.2.1、H桥驱动电路
H桥驱动电路: 图中所示为一个典型的直流电机控制电路。电路得名于“H桥驱动电路”是因为它的形状酷似字母H。4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:该图只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。图所示,H桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向;要使电机运转,必须使对角线上的一对三极管导通。例如,如下图所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。该流向的电流将驱动电机顺时针转动。当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动;在H桥的基础上,本电路添加了两个三极管构成前级驱动放大作用,使得单片机可以很容易控制电机的转速和转向。同时本电路接入了采样电阻,便于监测电流的大小。
2.2.2、89C52主板控制电路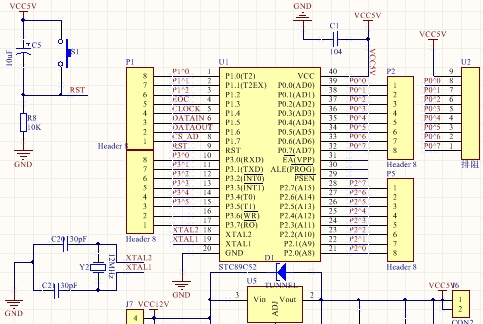
2.2.3、LM317稳压器降压电路
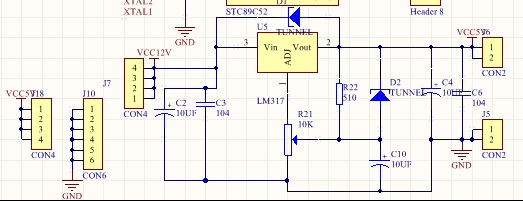
LM317T是一种这样的器件:由Vi端提供工作电压后,他便可以保持其+V out端(2脚)比其ADJ端(1脚)的电压高1125V。因此,只需要用极小的电流来调整ADJ端的电压,便可在V out端得到比较大的电流输出,并且电压比ADJ端高出恒定的1125V。还可以通过调整ADJ端(1端)的电阻值改变输出电压(LM317T会保证接入ADJ端和+V o端的那部分电阻上的电压为1125V)。所以,当ADJ端(1端)的电阻值增大时,输出电压将会升高。
值得注意的是,LM317T有一个最小负载电流的问题,即只有负载电流超过某一数值时,他才能起到稳压的作用。这个电流随器件的生产厂家不同在3~8mA不等,这个可以通过在负载端口外接一个合适的电阻来解决。
输出电压计算公式:输出电压=1.25*{ADJ端到地电阻/ADJ端到OUT的电阻}
2.2.4、TLC2543的AD采集电路
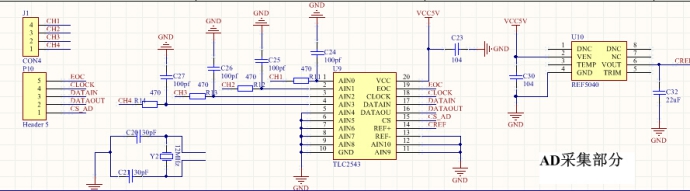
TLC2543是TI公司的12位串行模数转换器,使用开关电容逐次逼近技术完成A/D转换过程。由于是串行输入结构,能够节省51系列单片机I/O资源;且价格适中,分辨率较高,因此在仪器仪表中有较为广泛的应用。
TLC2543的特点:
(1)12位分辩率A/D转换器;
(2)在工作温度范围内10μs转换时间;
(3)11个模拟输入通道;
(4)3路内置自测试方式;
(5)采样率为66kbps;(6)线性误差±1LSBmax;
(7)有转换结束输出EOC;
(8)具有单、双极性输出;
(9)可编程的MSB或LSB前导;
(10)可编程输出数据长度。
本AD采集电路12通道的AD采集芯片TLC2543,由REF5040提供基准电压,将此模块送入单片机检测,从而可以实现对电压的采集,实现系统功能
2.2.5、其他部分电路
a、电流监测电路:
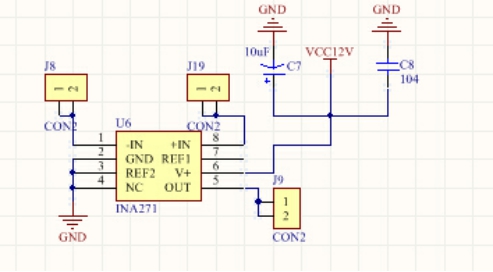
电流检测电路采用的是TI的芯片INA271,内含仪表放大电路。两个输入进行差分放大,将小信号放大为大信号便于AD的采集和读取,提高精确度,通过多次测量可以算出其实际放大倍数。
b、按键控制电路:
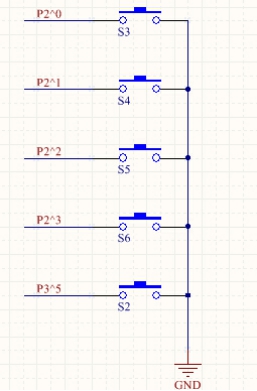
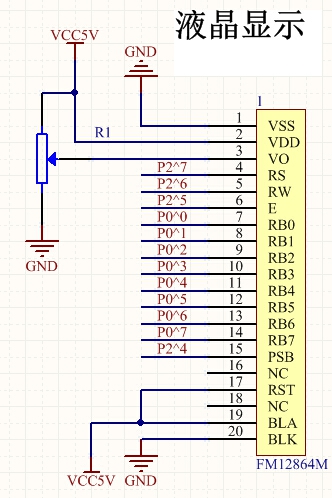
c、液晶显示电路:
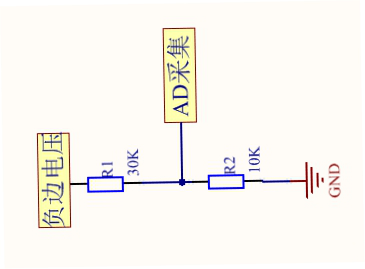
d、分压电路:
3、作品性能测试与分析
3.1、系统测试设备
万用表
直流稳压源
量角器
3.2、系统测试方法与数据
(1)正反转测试
将系统接入微电机,通过按键控制控制正反转和停止,通过测试可知,无论是带负载还 是空载,微电机都可以正反转和停止。
(2)驱动电流测试
将负载换成功率滑动变阻器,通过调节不同的阻值,可以得到不同的电流,可以测试出驱动板的最大驱动电流,通过测试,本电路板可以驱动超过200MA的电流。
(3)任意位置定位测试
将定位角度先用于定位电压,然后将电压换成对应的角度,因为每一个电压值对应于一个角度,这样便实现了电机的定位。
|
实验
次数
|
输入电压U/V
|
降压电压U/V
|
定位电压U/V
|
定位角度
/度
|
误差电压
U/V
|
误差角度
/度
|
|
1
|
12.00V
|
5.00
|
0.828
|
0
|
0.004
|
1.0
|
|
|
|
|
|
|
|
|
3.3、实物图
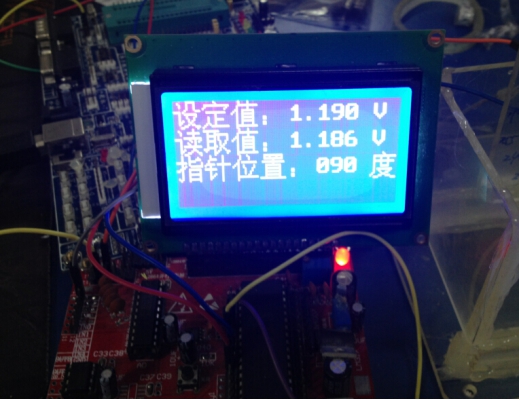
(液晶显示采集值以及定位及哦啊度)
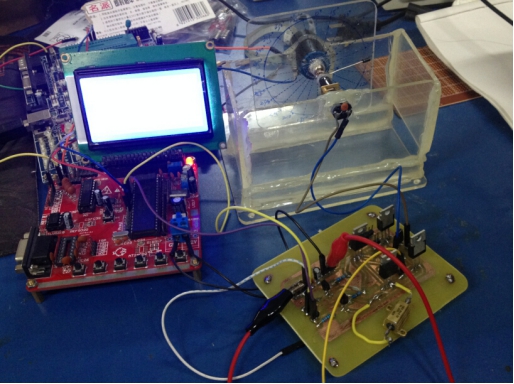
(整体实物图)
4、附录一:部分电路原理图

(最小系统、降压、按键电路、仪表放大电路)
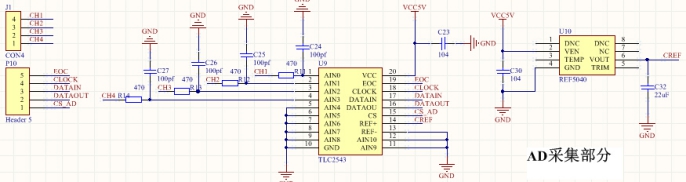
(TLC2543AD采集电路)
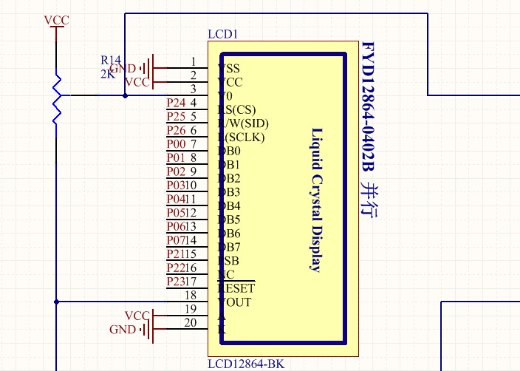 (12864液晶显示)
(12864液晶显示) (微电机驱动电路)
(微电机驱动电路)
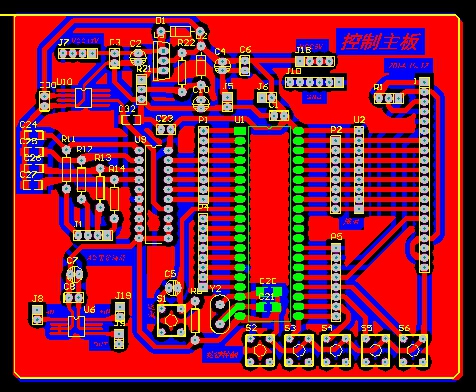
5、附录二:PCB电路板
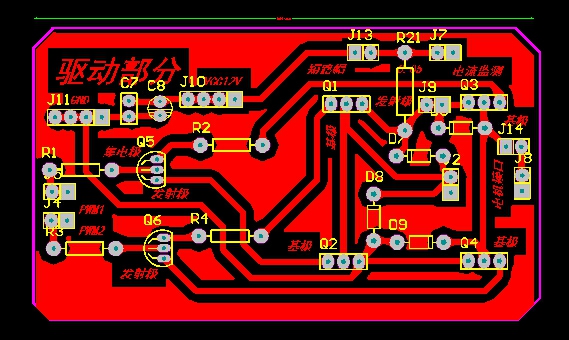
(微电机驱动电路)