视频监控机器人制作教程
原材料和组件
1) 方形卡通宠物外观的纸巾盒 1 个
2) 万能手机夹 1 个
3) 网灵机器人 3D 打印件 1 套
4) Arduino 控制板 + 蓝牙小板 1 块
5) L298N 电机驱动模块 1 块
6) 标准舵机 1 个
7) 电池电压传感器模块 1 个
8) 可充电锂电池 1 块
9)65mm 轮子 + 电机(转速不要太快,大概为 50 转每分钟) 2 套
10) 一寸万向轮 1 个
11) 开关 1 个
12) M3x30mm 长螺丝 4 根,M3x25mm 螺丝若干,M3x8mm 螺丝若干,自攻螺丝若干,铜柱长螺丝 2 根,M3 螺母若干
13)
杜邦线若干,导电线若干

工具
电烙铁,电钻,502 胶,电胶布,钳子,改锥,小刀组装步骤
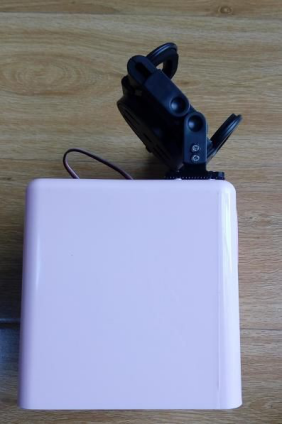
首先,将纸巾盒的上下两部分揭开,分为上面的盒子和下面的底盖,先用盒子。
将 3D 打印件--手机夹左支架 和 手机夹右支架 用自攻螺丝固定到盒子上,如下图,注意左右支架都要固定到盒子的最边缘, 否则后面步骤将没有足够的宽度放置手机夹。

准备好标准舵机,尺寸 40.7*19.7*42.9mm

用 2 个自攻螺丝把舵机固定到‘手机夹左支架’上面,如下图:
从正面看看,

下面开始弄万能手机夹,先把里面的一层透明塑料板拆下来,透明塑料板后面要用到,别扔了。 把一侧的 2 片可活动塑料片调整一下位置,下方的一片将会固定到‘手机夹右支架’上。
将 3D 打印件--‘手机夹联轴器’ 插到手机夹的凹槽处,如下图所示:

注意,舵机配带的一字摆臂是事先用自攻螺丝 固定到‘手机夹联轴器’上,这个一字摆臂是将要插到舵机的转轴上的。
准备将手机夹安放到 左右 2 个支架上去。一边是:一字摆臂插到舵机的转轴上。
另一边是:用 2 个自攻螺丝将‘手机夹右支架’和手机夹的下方可活动塑料片 紧紧固定。

到此,盒子部分就准备好了。下面开始弄底盖部分。
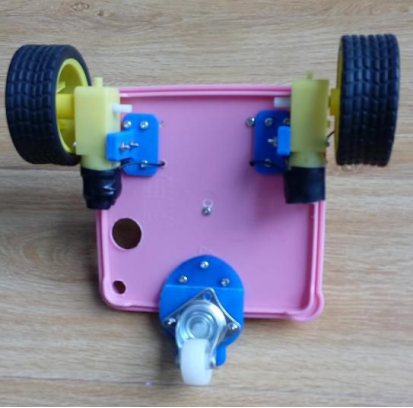
用 M3x25mm 的长螺丝 将 2 个 3D 打印件‘底盘车轮支架’固定到底盖。
然后把 3D 打印件‘底盘万向轮支架’也固定到底盖。
反面看是这样的:
用电钻在底盖上钻 2 个孔:
一个直径 20mm, 用于装开关;
另一个直径 9mm,用于装充电接口;
然后用 M3x30mm 的长螺丝把 2 个车轮(带电机)安装到‘底盘车轮支架’上,两对电机线 4 根从底盖穿孔引到里面去; 用 M3x8mm 的螺丝把万向轮安装到‘底盘万向轮支架’上。
在里面用螺丝固定 3D 打印件‘电池固定盒’,
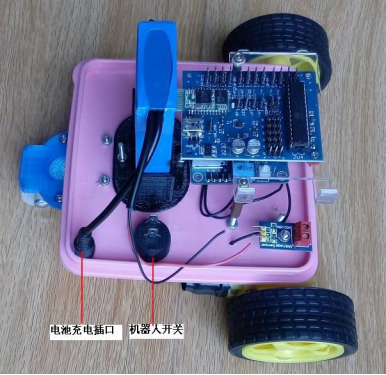
然后安装 L298N 电机驱动板,如下图所示:
把 2 个长的 M3 铜柱螺丝装上去,然后把之前拆下来的手机夹透明塑料板安装到铜柱螺丝上,用 2 个螺母固定。透明塑料板上的螺丝孔可以用电路铁或电钻弄出来。

把“Arduino+蓝牙”控制板用螺丝固定到透明塑料板上, 把锂电池安装到‘电池固定盒’中:
换个角度看看:

把电池电压检测模块小板 也安装上去:
把锂电池的 DC 母头线安装到 底盖的充电孔中,用 502 胶固定; 把 20mm 直径的开关安装到 底盖的开关孔中。
到此,底盖部分要装的也装好了。(当然,后续如果你要往 Arduino 控制板上连接传感器模块的话,随时可以揭开盒子连接线路!)
准备把纸巾盒上下两部分盖上:

OK,物理结构就组装完毕了,大功告成!!!
最后还可以在左右两边再装上 2 个舵机,固定 2 个小手臂,机器人看起来会更萌。