1 ʵ��Ŀ��
ͨ�� matlab ����ʾ�������� PCA ԭ��
2 ʵ��ԭ��
���ɷַ��� (principal component analysis PCA), ͨ�������任��һ����ܴ�������Եı��Aת����һ�����Բ���صı��A��ת��֮���������A�������ɷ֡�����ǧ��ȡ������Ҫ�������A������ǧ��ά���ݵĽ�ά������ͳ�Ʒ����ķ����о�����A��ʱ���A�ĸ���̫�࣬�����˸����ԣ���ǧ���A֮������һ��������Եģ�Ҳ����˵��ͬ�ı��A��������ȫ����Ϣ�����ص���������ġ����㷨������ͼ 1��ʾ��

ͼ 1: PCA �㷨����ͼ
3 ʵ������
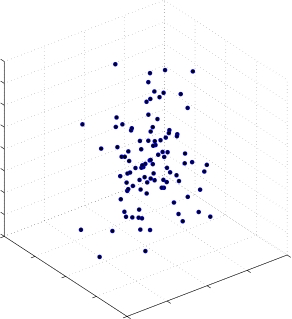
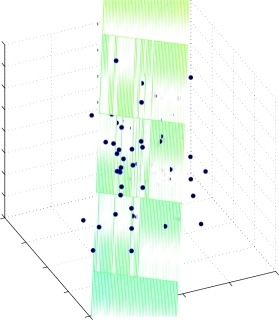
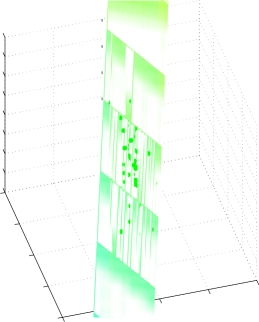
��ͼ 2��ʾ��������� 3 ά�㣬��ͼ 3��ʾ��ѡȡ����ֵ���������������A����ͶӰ��������ͶӰƽ�棬��ͼ 4��ʾ�����Ƴ� 3 ά�� 2 ά��ͶӰ������ʾ��������̵�ԭ������ͼ 5��ʾΪ���ͶӰ�õ��Ķ�ά������ά�����е�λ�ã����Կ�������Щ�㶼λǧһ��ƽ���ϣ���ͼ 6��ʾΪ��ά�㵽һά���ͶӰ�ߣ���ѡ��ͶӰ��Ϊ����ֵ�����������A����ͼ 7��ʾ�������˶�ά��һά��ͶӰ���ߣ���ͼ 8��ʾΪ��ά��Ϊһά�ĵ㡣����������ʾ��һ����ά����Ϊһά�Ĺ��̣�����������ʧ���������ܱ����֡�
 2
2
1.5
1
0.5
0
−0.5
−1
−1.5
−2
2
1 2
0 1
0
−1 −1
−2 −2
ͼ 2: �����ά��
x 2.67049435798803e1−y 5.058306494383652e−1
 2
2
1.5
1
0.5
0
−0.5
−1
−1.5
−2
2
1
0
2
−1 1
0
−1
y −2 −2
x
ͼ 3: ��ά����άͶӰ��
 2
2
1.5
1
0.5
0
−0.5
−1
−1.5
−2
2
1
0
−1
−2 −2 −1.5 −1 −0.5 0 0.5
y
x
1 1.5 2
ͼ 4: ��ά����ά��ͶӰ����
x 2.67049435798803e1−y 5.058306494383652e−1
 2
2
1.5
1
0.5
0
−0.5
−1
−1.5
−2
2
1
0
−1 2
1
 y 0
y 0
−2 −2
x
ͼ 5: ��ά����ά��ͶӰ��
 2
2
1.5
1
0.5
0
−0.5
−1
−1.5
−2
2 2
1 1
 0 0
0 0
−1
−2 −2
y x
ͼ 6: ��ά��һά��ͶӰ��
x 2.67049435798803e1−y 5.058306494383652e−1
 2
2
1.5
1
0.5
0
−0.5
−1
−1.5
−2
2 2
1 1
 0 0
0 0
−1
−2 −2
y x
ͼ 7: ��ά��һά��ͶӰ����
 2
2
1.5
1
0.5
0
−0.5
−1
−1.5
−2
2 2
1 1
 0 0
0 0
−1
−2 −2
y x
ͼ 8: ��ά��һά��ͶӰ��
4 �ĵ����
1. ʹ�� PCA �����ݽ��н�ά��˼·�����������������һ��������A����
X⃗ = {X1, X2, X3, ...XN } N = 0, 1, 2... (1)
�� M ��������˵�������� M �� X⃗
�¼���X⃗
�� N ά��ÿһάΪ������������A XN ����Ҫ����ά��
��ά������������ڲ���ά֮���Э����Ϊ 0���ѱ�֤��ά������������࣬ÿһλ��ʾ����Ϣ���������ص���ͬʱ��ά�ķ�����Ҫ�����Ϊ�������������ݼ�����Խ�˵��Խ���㱻ئ��������AЭ�� ������У���ά��ֵλǧ�Խ��ߣ�Э����λǧ�����ǶԽ���λ�ã�������Ҫ�Խ���ֵ�������λ��ֵΪ 0���ⲻ���������뵽�˾���ĶԽǻ����Խǻ���ɵĹ������ǽ�������Խ���Ϊ����Ԫ�ر�� 0. ����ĶԽǻ�����ʽΪ
B = T −1AT (2)
���� A Ϊ���Խǻ�����T Ϊ A ���������A��ɵľ����������ǽ� A �����ǵ�Э���������ô T �������Э��������������A��ɵľ��Խǻ��Ĺ����Ѿ������Э���� 0 ����������ʹ��ά�ķ������ B �ĶԽ���Ԫ�������Ϊ����ֵ����������A�Ǿ���任����Ҫ����������ռ�ı任�ɷ�Ӧ�ñȽϴ� B �ĶԽ���Ԫ��Ӱ��Ҳ�Ƚϴ�����������и�������ֵ�������������A����ɾ��� T �ķ��������ճɷֵĹ����ʣ�����ִ�н�ά��ά�ȹ����ʲ�����ǧ 80%��
��ʹ��ʽ 3����Э��������ʱ��A Ϊ�������ݼ�����N Ϊ����ά������Ҫע������������ݼ�
A ����ȥ��ֵ����ʹ������ά��ֵΪ 0������ʹ�øù�ʽ��������IJ���Э�������
 C = 1 AAT (3)
C = 1 AAT (3)
N
��ִ�����ݽ�ά��ʱ�Ӷ�ά���ݽ���һά�ı任Ϊ A���õ������һά���������� A �Ļ�Ϊ���������ٳ���������ķ�����������任������ͬ���һ�µĻ����õ���һά����Ϊ��ͶӰ���ȡ�Matlab �м����������A�ĺ����Ѿ�������������A��λ���IJ��������ԣ�������ͬ���ڻ��õ��ı���ͶӰ���ȡ� ʵ�����漰�����ͶӰ������ԭ����ά������ʾ�����⣬ֻҪ�����ͶӰ���ȳ���ԭ��ͶӰ�Ļ����A�� ���ˡ�
Matlab �����Ҫ����д����������ǰ axes�����л�ͼ��ֻ��Ҫ����һ�� hold on, �Ϳ��Է�ֹ plot Ѯ�����Զ����ա�
5 ����
 PCAdemo.m
PCAdemo.m
1 f u n c t i o n PCAdemo
2 c l o s e a l l ; c l e a r ; c l c ;
3 h_figure=f i g u r e ;
4 mu=[0 0 0 ] ;
5 %Э������� �� �Խ�Ϊ����ֵ 0 . 3 �� 0 . 3 5
6 dim=3;
7 var =[ 0.2 0 0 ; 0 0 . 5 0 ; 0 0 0 . 8 ] ;
8 samNum=100;
9 data=mvnrnd(mu, var ,samNum ) ;
10 h_plotMain=p l o t3 ( gca , data ( : , 1 ) , data ( : , 2 ) , data ( : , 3 ) , �� o �� , . . .
11 �� MarkerSize �� , 5 , �� MarkerFaceColor �� , �� k �� ) ;
12 xlim ([ −2 2 ] ) ; ylim ([ −2 2 ] ) ; z l im ([ −2 2 ] ) ;
13 g r i d on ; a x i s square ; hold on ;
14 pause ( ) ;
15 covdata = cov ( data ) ;%���������
16 [ e i g Ve cto r , e i g Val u e ]= e i g ( covdata ) ;%�� Э �� �� �� �� �� �� �� ֵ �� �� �� �� �A
17 e i g Val u e=d iag ( e i g Val u e ) �� ;
18 [ eigValue_sort , IX]= s o r t ( eigValue , 2 , �� descend �� ) ;
19 e i g Ve c to r _s o r t = [ ] ;
20 f o r i =1:dim
21 tempIX=IX( i ) ;
22 e i g Ve c to r _s o r t =[ e i g Ve c to r _s o r t e i g V e c to r ( : , tempIX ) ] ;
23 end
24 base_3to2=e i g Ve c to r _s o r t ( : , 1 : 2 ) ;%��ά�� 2 ά
25 base_3to1=e i g Ve c to r _s o r t ( : , 1 ) ;%��ά�� 1 ά
26 base_3to2=base_3to2 �� ;
27 base_3to1=base_3to1 �� ;
28 %%%%%����3 ά��� 2 ά�ȵ�ͶӰƽ��%%%%%
29 A=base_3to2 ( 1 , : ) ;%�»� i ñ ( ���ԭ�� )
30 B=base_3to2 ( 2 , : ) ;%�»� j ñ ( ���ԭ�� )
31 C=[0 0 0 ] ;
32 syms x y z ;
33 D=[ ones ( 4 , 1 ) , [ [ x , y , z ] ; A;B;C ] ] ;%�� �� �� �� �� �� �� �� �� �� ֪ ��D�� �� �� ʽ �� ǧ �� �� �� ƽ �� �� �� ��
34 detd=det (D) ;
35 z=s o l v e ( detd , z ) ;
36 ezmesh ( z ,[ −2 , 2 , −2, 2 ] ) ;
37 pause ( ) ;
38 %%%%%%%%%%%%
39 data_proj3_2=base_3to2*data �� ;%ͶӰ���»����� ( ����»� )
40 data_proj3_1=base_3to1*data �� ;%ͶӰ���»����� ( ����»� )
41
42 data_proj3_2=data_proj3_2 �� ;
 43 data_proj3_1=data_proj3_1 �� ;
43 data_proj3_1=data_proj3_1 �� ;
44
45 data_proj_respect_to_orienbasis3_2 = [ ] ;%�� �� �� �� �� ԭ �� �� ʾ
46 data_proj_respect_to_orienbasis3_1 = [ ] ;%�� �� �� �� �� ԭ �� �� ʾ
47 f o r i =1:samNum
48 data_proj_respect_to_orienbasis3_2 =[ data_proj_respect_to_orienbasis3_2 ; . . .
49 data_proj3_2 ( i , 1 ) * base_3to2 ( 1 ,:)+ data_proj3_2 ( i , 2 ) * base_3to2 ( 2 , : ) ] ;
50 data_proj_respect_to_orienbasis3_1 =[ data_proj_respect_to_orienbasis3_1 ; . . .
51 data_proj3_1 ( i )* base_3to1 ( 1 , : ) ] ;
52 end
53
54 %����3 ά��Ϊ 2 ά�������
55 h_plot3_2=p l o t3 ( gca , data_proj_respect_to_orienbasis3_2 ( : , 1 ) , . . .
56 data_proj_respect_to_orienbasis3_2 ( : , 2 ) , data_proj_respect_to_orienbasis3_2 ( : , 3 ) , . . .
57 �� o �� , �� MarkerSize �� , 5 , �� MarkerEdgeColor �� , �� g �� , �� MarkerFaceColor �� , �� g �� ) ;
58
59 %����3 ά��Ϊ 2 ��ͶӰ����
60 hl3_2 = [ ] ;
61 hl3_1 = [ ] ;
62 f o r i =1:samNum
63 dd=[ data_proj_respect_to_orienbasis3_2 ( i , : ) ; data ( i , : ) ] ;
64 hl3_2 ( i )=p l o t3 ( gca , dd ( : , 1 ) , dd ( : , 2 ) , dd ( : , 3 ) , �� −. �� , �� m a r k e r s i z e �� , 1 0 ) ;
65 end
66 pause ( ) ;
67 d e l e t e ( h_plotMain ) ; d e l e t e ( hl3_2 ) ;
68 pause ( ) ;
69 %����3 ά��Ϊ 1 �Ļ���
70 h_zhixian=p l o t3 ( gca , data_proj_respect_to_orienbasis3_1 ( : , 1 ) , . . .
71 data_proj_respect_to_orienbasis3_1 ( : , 2 ) , data_proj_respect_to_orienbasis3_1 ( : , 3 ) , . . .
72 �� c o l o r �� , �� r �� , �� l i n e w i d t h �� , 2 ) ;
73 pause ( ) ;
74 %����3 ά��Ϊ 1 ������
75 h_plot3_1=p l o t3 ( gca , data_proj_respect_to_orienbasis3_1 ( : , 1 ) , . . .
76 data_proj_respect_to_orienbasis3_1 ( : , 2 ) , data_proj_respect_to_orienbasis3_1 ( : , 3 ) , . . .
77 �� o �� , �� MarkerSize �� , 5 , �� MarkerEdgeColor �� , �� r �� , �� MarkerFaceColor �� , �� r �� ) ;
78 %����3 ά��Ϊ 1 ��ͶӰ����
79 f o r i =1:samNum
80 dd=[ data_proj_respect_to_orienbasis3_1 ( i , : ) ; data_proj_respect_to_orienbasis3_2 ( i , : ) ] ;
81 hl3_1 ( i )=p l o t3 ( gca , dd ( : , 1 ) , dd ( : , 2 ) , dd ( : , 3 ) , �� −. �� , �� m a r k e r s i z e �� , 1 0 ) ;
82 end
83 pause ( ) ;
84 d e l e t e ( h_plot3_2 ) ; d e l e t e ( hl3_1 ) ; d e l e t e ( h_zhixian ) ;
85 end
