|
开题报告(不少于1000字)
一、选题背景、意义及依据
“空中航母”,这种从大型飞行器上释放回收小飞机的设想,一直活跃在现在各类科幻作品中,从美国早期的“阿克伦”巨型飞艇,苏联的轰炸机版“空中航母”TB-3,德国的子母轰炸机,人们对空中航母的现实尝试也没有停止,碍于早期技术限制和对飞行技巧的超高要求,各国未没能对空中航母提出一个完善的方案。
目前无人技术日趋完善,无人机广泛应用于军事侦察打击对抗、农业植保、环境监测、通信中继、电力巡检等多个方面,由于大多数无人机单机的续航和负载能力有限,在提升单机性能的方法之外,各国也在大力发展对无人机集群释放、控制、应用、回收的研究。美国国防部重新提出了“弹药母机”项目[1],美军应用了新研制的空中释放/回收系统,使得它可以在空中释放无人机,并且可以在半小时内回收4架无人机,这种可放可收的技术使得空中航母设想成为了现实,美军希望在未来空中航母能够携带大量无人机通过饱和式打击为隐身战机开辟空中进攻走廊。
2019 年 11 月,美军进行“空中航母”级搭载无人机试飞的试验,却以失败而告终。在美国犹他州盐湖城附近的杜格威,美军的 C130 运输机搭载了 X61A“小精灵”无人机投射起飞。在飞行过程中,X61A 在 C130 上完成了空中发射并且实现稳定动力飞行。然而,好景不长,在回收环节出现了无人机失联的情况,美军在不间断搜索之后,最终只找到了 X61A 的残骸。
空中航母的未来重要性不仅体现于军事方面,比如在民用救灾方面,空中航母携带无人机进入道路中断的救灾区域,实现快速应急基站搭建[2],通过回收无人机进行充电维修,延长续航时间,扩大搜救和运输物资范围,提升救灾效率。在电力巡检,遥感监测,农业植保方面,
就现在释放/回收技术,主要集中在旋翼无人机和垂起固定翼无人机,这两者控制相比传统固定翼更加简单,但设计相比传统固定设计更复杂,同样复杂的结构使得载荷能力、续航能力和抗风能力都有所下降,而固定翼无人机因控制和动力学耦合,加大了控制系统设计和移动平台的回收难度,我希望通过该项目设计一种固定翼的移动平台的自主降落回收系统,实现固定翼自主在移动平台降落的方法,从而降低对无人机操作人员的要求,提高回收效率。
二、国内外研究现状
针对固定翼自主降落的问题,国内外针对不同情况都有研究,根据降落平台环境不同,提出不同的回收的方法[3]。
1. 传统跑道回收法
基于传统跑道回收法对无人机降落要求较低,但对场地要求更高,海上移动平台需要甲板、尾钩和阻拦索等设施辅助固定翼降落,比较成功的是美军在航母上起降“捕食者”,但空中平台因空间限制基本不使用该种方法。
2. 网回收法[4]
基于弹性网回收无人机技术是固定翼无人机在小型舰船和移动车辆较为可行且应用范围较广的方法,并且不需要过多考虑降落姿态,只需确保着陆速度尽可以小,通过弹性网体和支体进行吸能缓冲,最后通过人力回收无人。该方法控制系统设计简单,但对无人机重量有一定要求,目前有南京航空大学研制的无人机拦阻网成功回收了重量在120kg-140kg,速度26m/s的无人机[5]。
3. 降落伞回收法
降落伞回收法通过降落伞维持无人机着陆速度,因伞对风敏感度较高,主要用于陆基无人机降落回收。
4. 深失速回收法
深度失速回收法指的是固定翼无人机在回收时刻通过改变升降舵,大幅度增加迎角,使得无人机升力大幅度减小,阻力大幅度增加,导致无人机速度迅速降低的过程[6],这种方法无需跑道和回收装置,但回收最后触地速度较大,目前只应用于重量较小的无人机[7]。
5. 定点高精度回收法
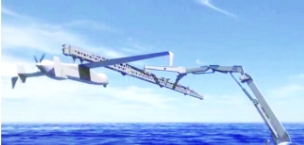
小型舰船易受甲板空间所限,难以寻到无人机所需着陆空间.美国国防高级研究计划局(DARPA)公布了SideArm系统原型旨在解决500 kg下固定翼无人机在小型船舶上回收的问题. SideArm系统由起重机、滑轨和制动装置3部分组成.在回收过程中,机载飞控系统根据接收到的SideArm信号控制无人机减速,从而通过滑轨降落到SideArm的制动装置中
因回收方式不同,固定翼控制方法也不同,主流针对固定翼的控制器有pid控制、总能量控制,传统pid控制主要针对固定翼在固定高度平飞进行控制设计,不同高度时,控制结果会有一些偏差,以PX4为主流的控制器则对前者的情况采用了总能量法,通过总能量不变的思路,在调整俯仰角的同时补偿滚转角,使无人机保持同高度的平飞状态,但因为改变高度使用L1方法进行路径规划,使得改变高度时需要改变无人机姿态, 姿态和轨迹耦合, 无法达到比较理想近距离轨迹控制, 针对空中加油这种需要精确控制的环境, 南京航空大学采用直接力控制对飞机姿态和轨迹进行解耦[8]。
直接力控制属于主动控制的一种,是20世纪60年代中期美国的一种飞机设计技术。60年代中期,美军将战略目标集中在发展机动性好的空中优势战斗机,集中精力研究主动控制技术 (ACT),以此来提升战斗机的机动性。在实现方法上,直接力控制有直接法和外加法。直接法就是直接从飞机动力学来考虑控制系统的设计与实现,得到相应的解耦控制。如美国的先进综合技术验证机AFTI/F16采用按任务剪裁的多模式控制系统,单独设计了解耦模态控制律。外加法是在已有的控制增稳系统基本闭环回路的基础上,考虑直接力控制系统的设计与实现,以完成解耦控制。外加法是采用多模态切换与叠加方法,在基本控制回路上附加部分前馈和反馈,以达到与内回路兼容条件下的解耦目的。美国的随控布局YF-16飞机和日本的主动控制技术验证机都是采用开环解耦,闭环修正的方法实现直接力控制,并都属于静态解耦[9]。
三、课题研究目标、研究内容、研究方法及关键技术
1. 研究方法及研究目标
该课题采用理论与实验相结合, 希望设计一种针对固定翼的移动平台的自主降落的控制引导系统,通过研究移动平台降落路径规划方法、融合平台GPS和视觉双传感器,使无人机至降落区域,机载电脑和PX4控制无人机降落。
2. 研究内容及关键技术
1)完成对选择机型无人机的动力学建模。无人机本身的状态、性能、操作机构影响后续主动控制方法的选择和设计,同时将更加精确的无人机动力学建模应用于仿真能使结果更加贴近实际,能更好的地应用到实际平台,增强实际控制的鲁棒性。
2)多传感器融合感知系统。GPS和视觉的结合,通过坐标系转换能够提供无人机关于平台更加精确的位置和姿态信息。
3)从飞机动力学来考虑控制系统的设计与实现,得到相应无人机姿态和轨迹的解耦控制,使无人机能更好以要求的姿态到达回收区域。
4)针对变化的风场环境和飞行参数,为维持飞机姿态变化,使用状态观测器(ESO)对误差进行拟合处理,将处理后的数据反馈给系统舵机输入,使无人机飞行过程更加平稳精确。
四、论文所遇到的困难和问题、拟采取的解决措施及预期达到的目标
1. 遇到的困难和问题
1)试验航模机型没有详细的动力学参数,数学建模遇到困难,拟采用一定的自适应控制使得控制器有一定控制余度
2)固定翼在空中移动平台自主降落的文献较少,项目涉及数学建模 程序编写 硬件开发等多个方面,很多需要通过实验边验证边修改方案.
2. 预期到达的目标
1) 设计固定翼在移动平台自主降落的方案
2) 撰写一篇论文
五、论文进度安排
2月 理论修改,完成硬件地面测试
3月上旬-4月上旬 方案修改与实验验证
4月下旬-五月 完成论文写作
六、参考文献
[2]马昊鹏,刘由之,李荣军,阎华,杨卫民.无人机航母系统的构建与应用[J].科技创新与应用,2020(01):37-40+43.
[3]谭立国,杨小艳,宋申民,霍建文.面向小型舰船的固定翼无人机海上回收方法综述[J].哈尔滨工业大学学报,2019,51(10):1-10.
[4] Wilkening D A. Airborne boost-phase ballistic missile defense[R]. Science and Global Security,2004: 1-3.
[5]李悦,周同礼,董立敏.某型无人机拦阻网回收系统设计[J].南昌航空工业学院学报(自然科学版),2004(01):82-85.
[6]胡涛. 无人机侧臂定轨拦阻仿真技术研究[D].南京航空航天大学,2020.DOI:10.27239/d.cnki.gnhhu.2020.000486.
[7]刘伏虎,马晓平.小型电动无人机深失速回收仿真研究[J].飞行力学,2011,29(05):77-80.DOI:10.13645/j.cnki.f.d.2011.05.020.
[8]黄永康. 基于直接力的空中加油对接飞行控制及仿真[D].南京航空航天大学,2021.DOI:10.27239/d.cnki.gnhhu.2021.001056.
[9] DENHAM J W.Project MAGIC CARPET:advanced controls and displays for precision carrier landings:AIAA 2016-1770[C]// Proc.of the 54th AIAA Aerospace Sciences Meeting,2016:1-14.
(宋体、小四、行间距25磅)
|