摘要
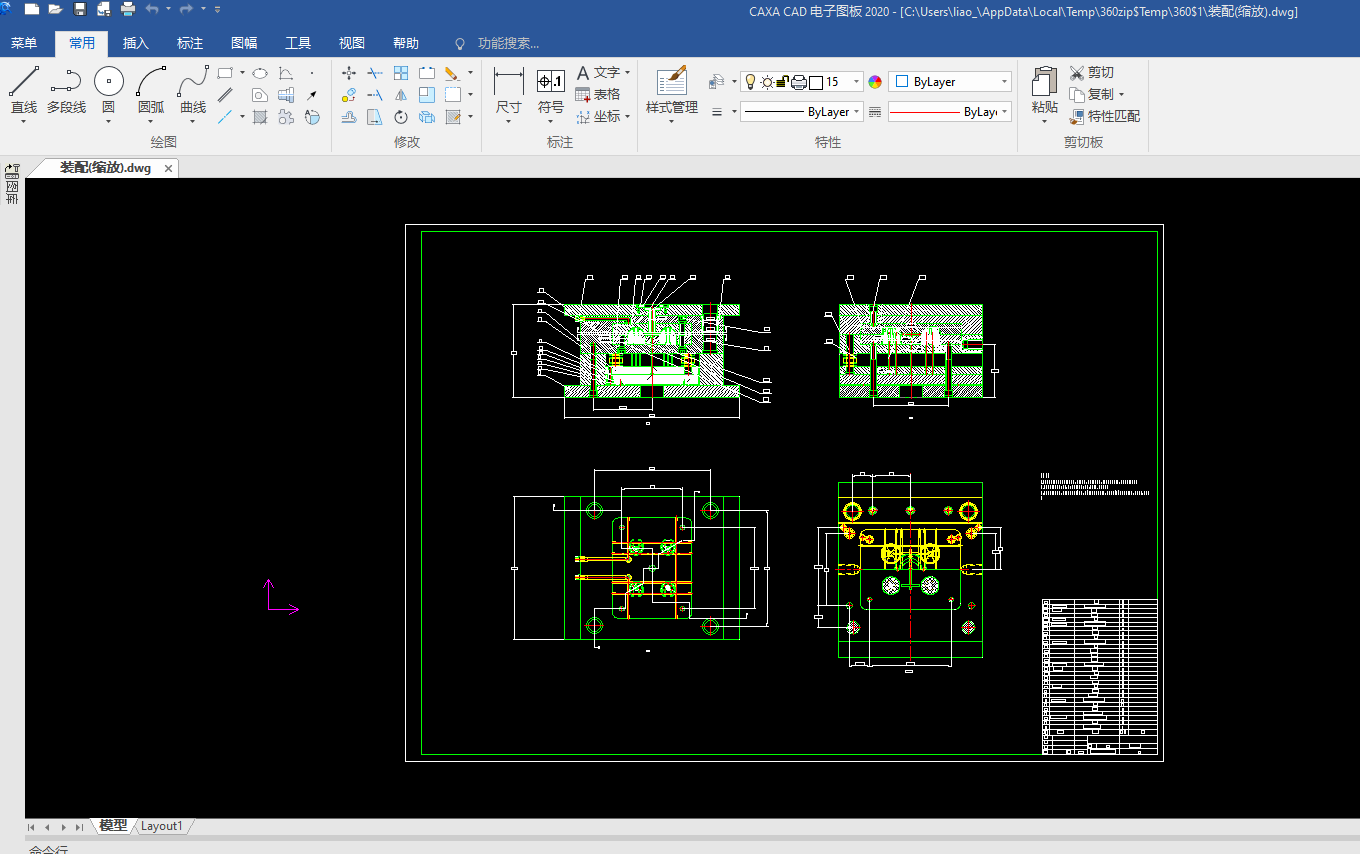
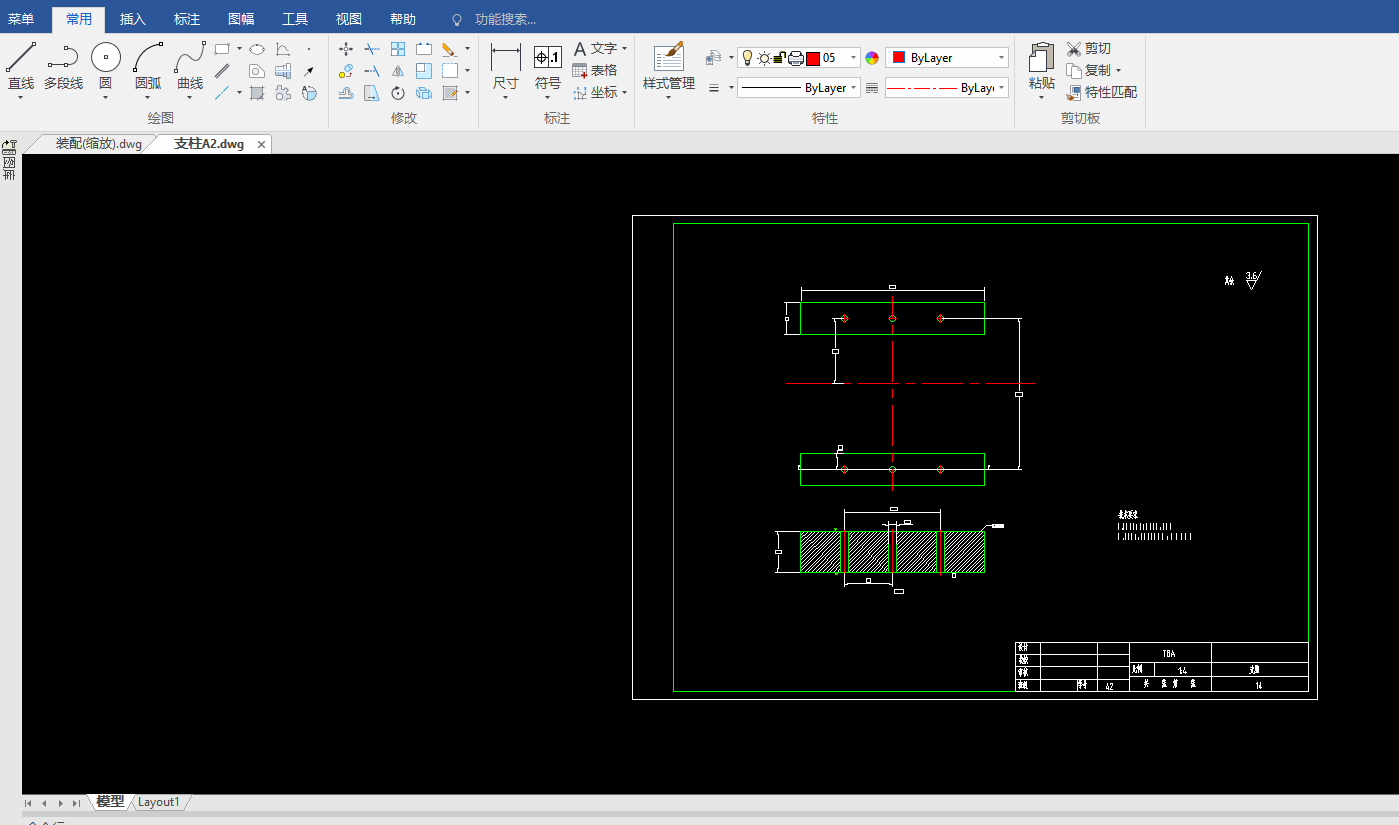
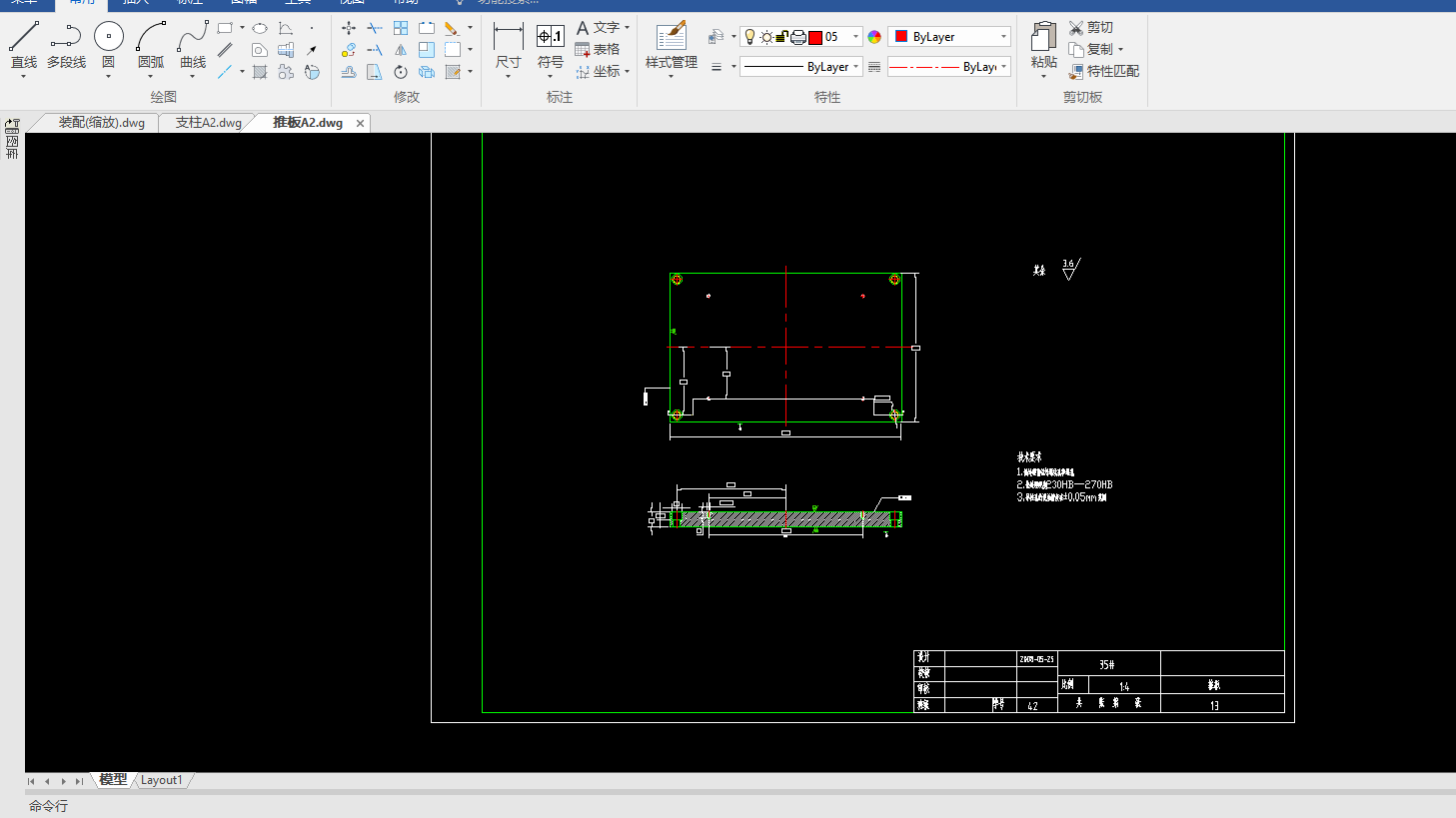
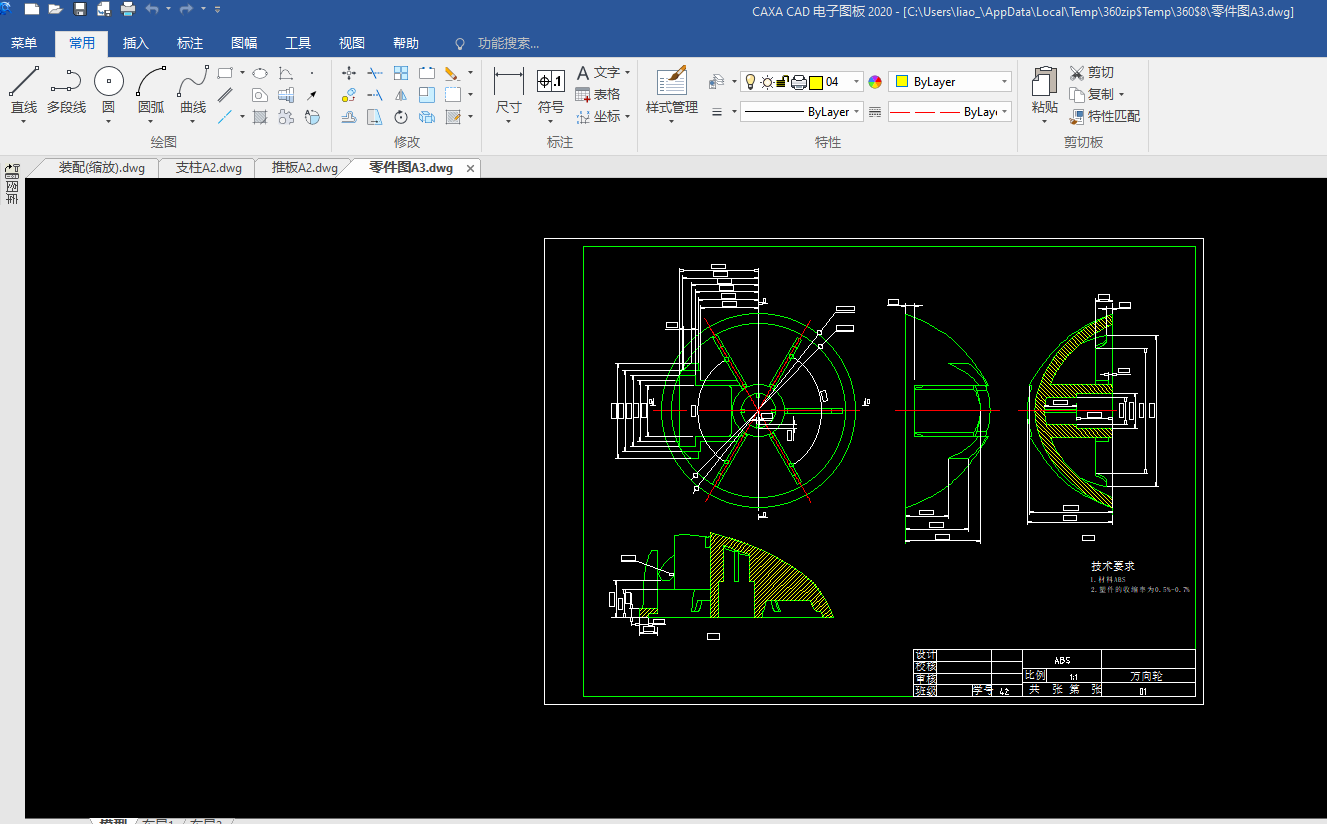
本文基于三维软件技术,对扫地机器人万向轮的注塑模设计进行了深入研究。首先,通过三维建模软件对扫地机器人万向轮进行精确建模,详细分析了其结构特点和尺寸要求。随后,根据万向轮的几何形状和材料特性,进行了模具分型面的设计与优化,确保了模具的顺利开合和产品的顺利脱模。在模具设计过程中,还充分考虑了注塑过程中的填充、保压、冷却等关键工艺参数,以确保产品质量和生产效率。此外,本文还探讨了模具材料的选用、模具零部件的设计与制造,以及模具的装配与调试等关键环节。通过实际生产验证,所设计的注塑模具能够稳定生产出符合质量要求的扫地机器人万向轮,为同类产品的模具设计提供了有益的参考。
关键词:三维软件;扫地机器人;万向轮;注塑模设计;模具分型面;注塑工艺参数
Abstract
Based on the design of the-software the is paper. First of all, the accurate modeling is conducted through the 3 D modeling software, and the structural characteristics and size requirements are analyzed in detail. Then, according to the geometric shape and material characteristics of the universal wheel, the design and optimization of the mold classification surface were carried out to ensure the smooth opening and closing of the mold and the smooth release of the product. In the design process of the mold, the key process parameters such as filling, pressure retention and cooling in the injection molding process are also fully considered to ensure the product quality and production efficiency. In addition, this paper also discusses the selection of mold materials, the design and manufacture of mold parts, as well as the assembly and debugging and other key links. Through the actual production verification, the designed injection mold can stably produce the universal wheel of the sweeping robot that meets the quality requirements, which provides a useful reference for the mold design of similar products.
Key words: 3 D software; sweeping robot; universal wheel; injection mold design; mold surface; injection process parameters