ABB三轴机器人泡棉贴敷设备设计
摘要
随着电子产品和汽车零部件等市场需求的持续增长,泡棉贴敷工艺在各类产品生产流程中的重要性日益凸显。泡棉贴敷的精准性、稳定性和效率直接关系到最终产品的品质和企业经济效益。然而,现有的泡棉贴敷设备在实际应用中常面临定位不准确、贴敷一致性差、设备运行速度慢以及换料和调试时间长等问题,导致产品良率下降,生产成本增加。本研究旨在设计一种基于ABB三轴机器人的泡棉贴敷设备,以解决现有设备存在的问题。通过对泡棉贴敷设备的结构设计进行优化,引入更高精度的定位系统,实施严格的质量控制流程,优化机械结构以提高运行速度,并设计人性化的换料和调试界面,旨在实现泡棉的高效、精准贴附。本研究的意义在于提高生产效率,提升贴敷精度,降低人工成本,并推动工业自动化的发展。
关键词:泡棉贴敷;ABB三轴机器人;设备设计;生产效率;贴敷精度
Abstract
With the continuous growth of the market demand for electronic products and auto parts, the importance of foam paste process in the production process of various products is becoming increasingly prominent. The precision, stability and efficiency of foam paste are directly related to the quality of the final product and the economic benefit of the enterprise. However, in the actual application, the existing foam application equipment often faces problems such as inaccurate positioning, poor consistency of application, slow running speed of equipment and long refueling and debugging time, which leads to the decline of product yield and the increase of production cost. This study aims to design a foam sticking device based on the ABB triaxial robot to solve the problems of the existing equipment. By optimizing the structural design of the foam paste equipment, introducing a more high-precision positioning system, implementing a strict quality control process, the mechanical structure is optimized to improve the operation speed, and the humanized refueling and debugging interface is designed to realize the efficient and accurate adhesion of the foam. The significance of this study is to improve production efficiency, improve application accuracy, reduce labor costs, and promote the development of industrial automation.
Key words: foam application; ABB three-axis robot; equipment design; production efficiency; application accuracy
目 录
1绪论
1.1选题背景及意义
1.2国内外研究现状
1.2.1国外现状
1.2.2国内现状
1.2.3发展趋势
1.3研究主要内容
2ABB三轴机器人泡棉贴敷设备的总体设计
2.1设计要求
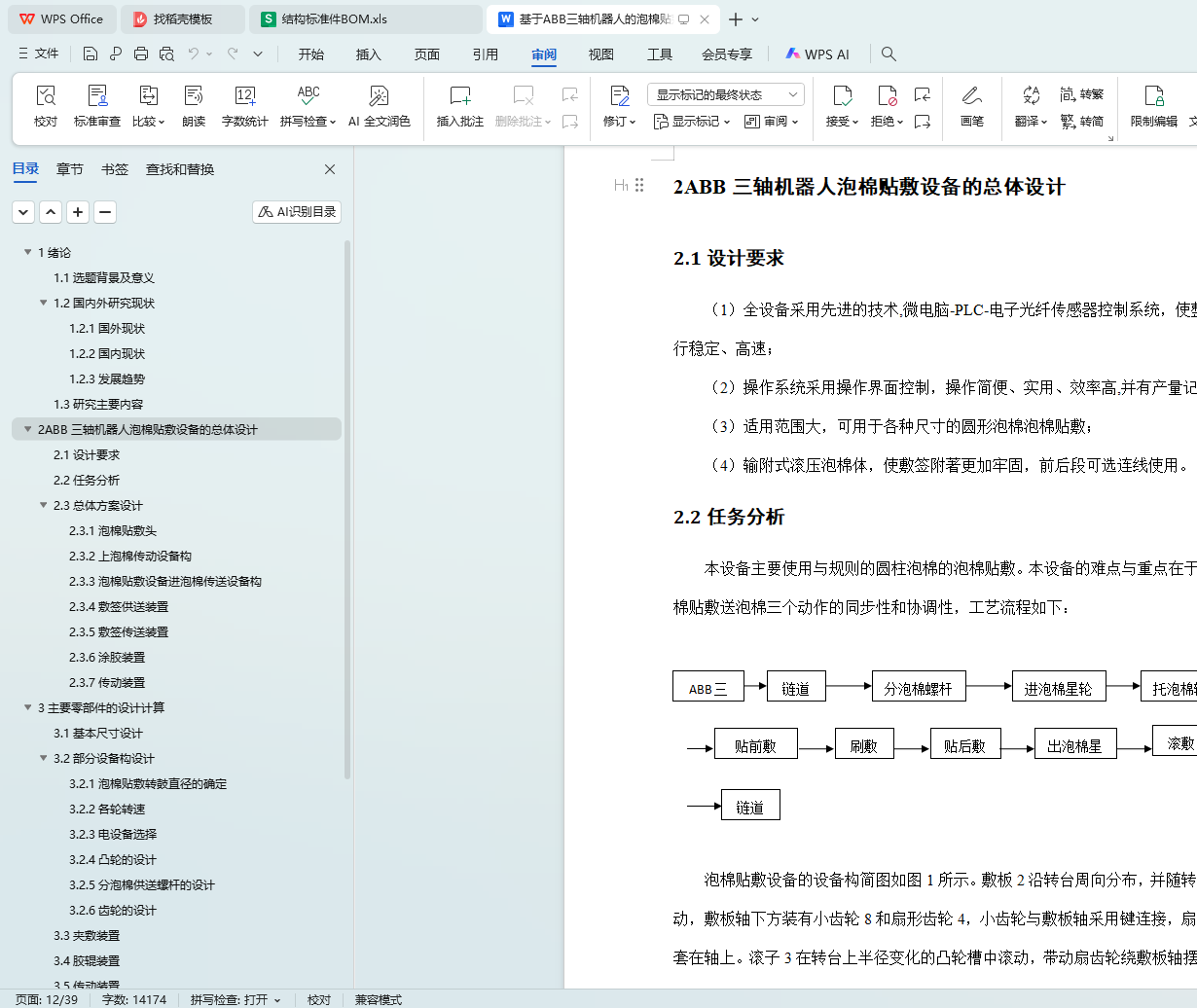
2.2任务分析
2.3总体方案设计
2.3.1泡棉贴敷头
2.3.2上泡棉传动设备构
2.3.3泡棉贴敷设备进泡棉传送设备构
2.3.4敷签供送装置
2.3.5敷签传送装置
2.3.6涂胶装置
2.3.7传动装置
3主要零部件的设计计算
3.1基本尺寸设计
3.2部分设备构设计
3.2.1泡棉贴敷转鼓直径的确定
3.2.2各轮转速
3.2.3电设备选择
3.2.4凸轮的设计
3.2.5分泡棉供送螺杆的设计
3.2.6齿轮的设计
3.3夹敷装置
3.4胶辊装置
3.5传动装置
4 PLC控制系统设计
4.1ABB三轴机器人泡棉贴敷设备控制要求
4.2控制系统设计方案
4.3可编程控制器PLC的选用
4.4 PLC的I/O分配
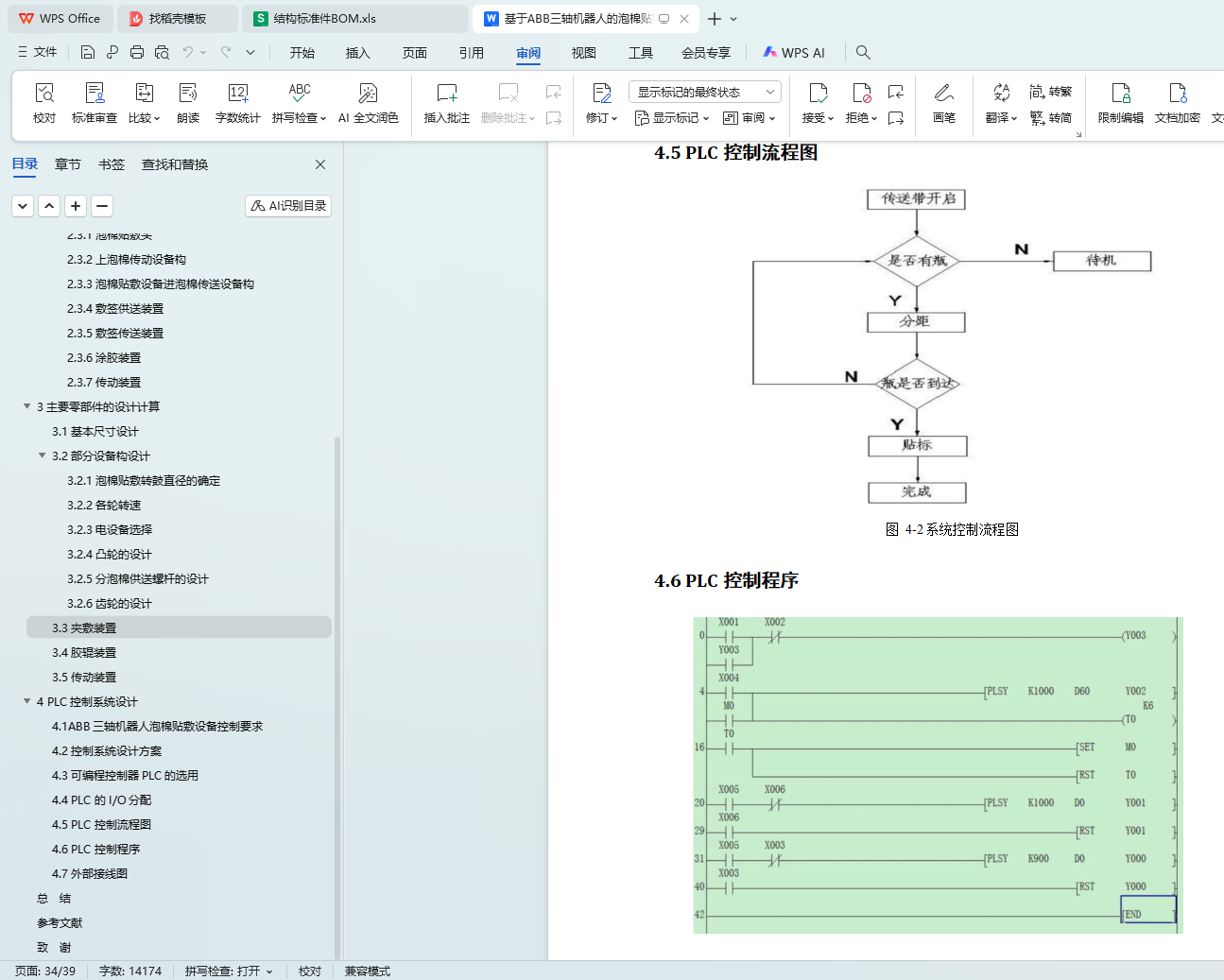
4.5 PLC控制流程图
4.6 PLC控制程序
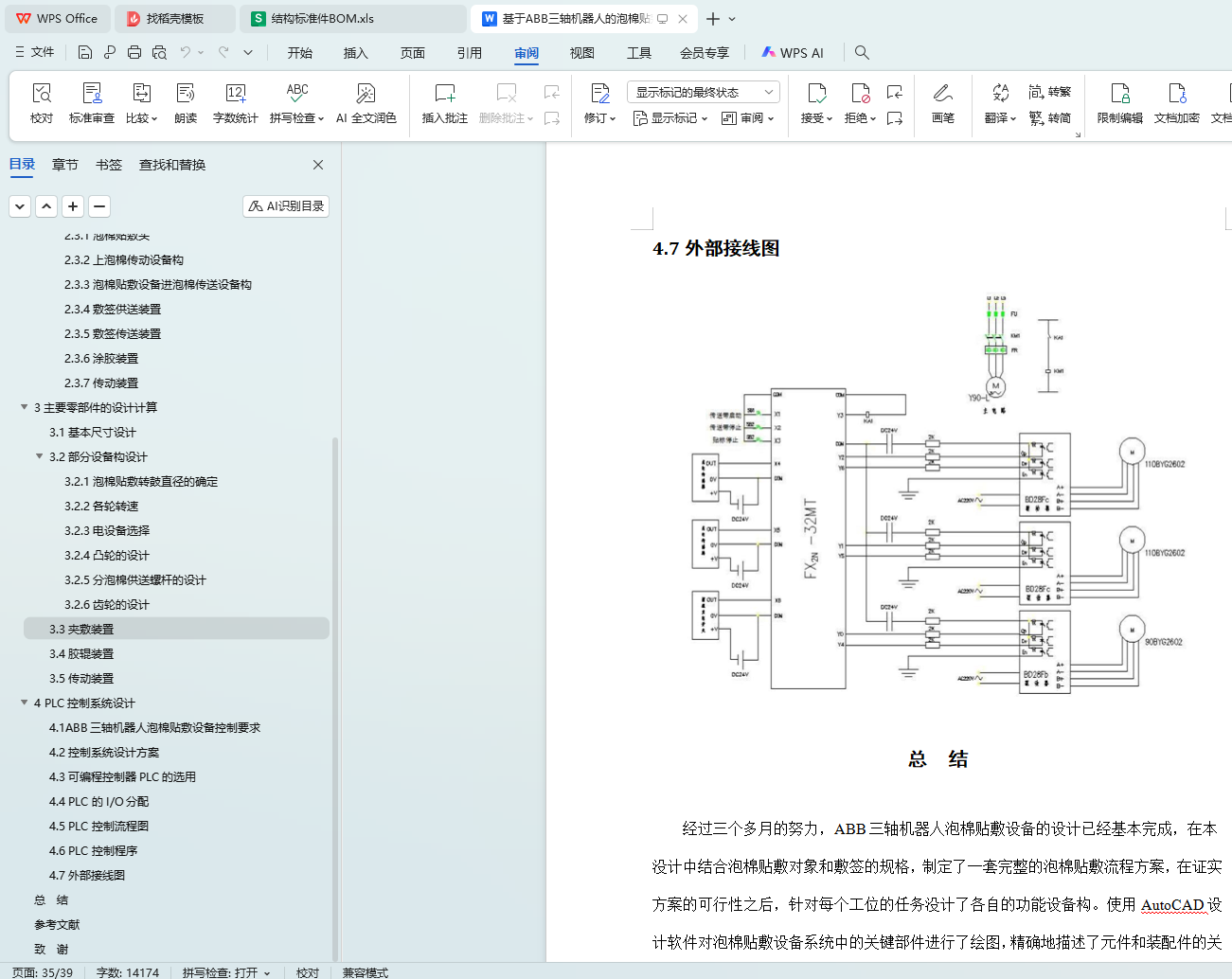
4.7外部接线图
总 结
参考文献
致 谢