摘 要
针对批量加工无缝管内孔人工上下料效率低下、劳动强度大及安全风险高的问题,本设计提出了一种经济型基于数控车床的自动上下料机构。该机构有效提高了生产自动化程度,能够模仿人的手部动作,根据作业要求,按照预先确定的程序、轨迹,通过液压系统实现精准的抓取和搬运操作。
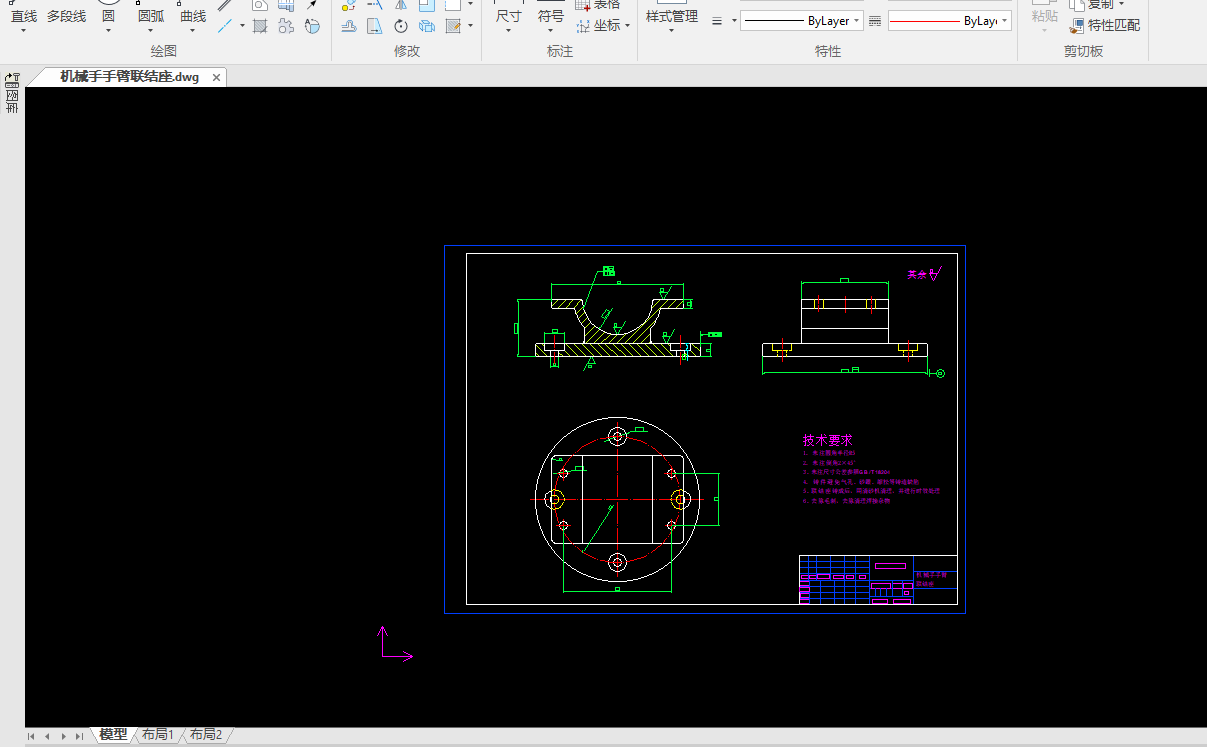
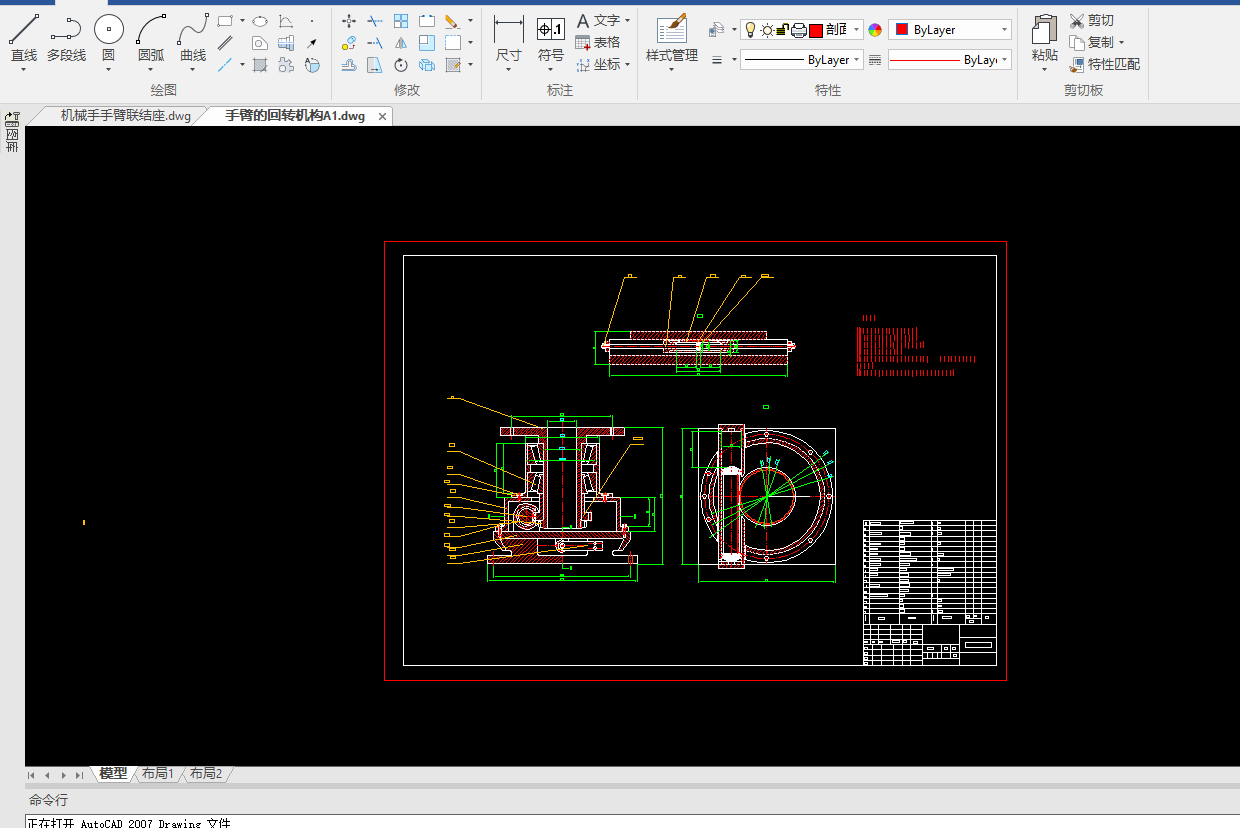
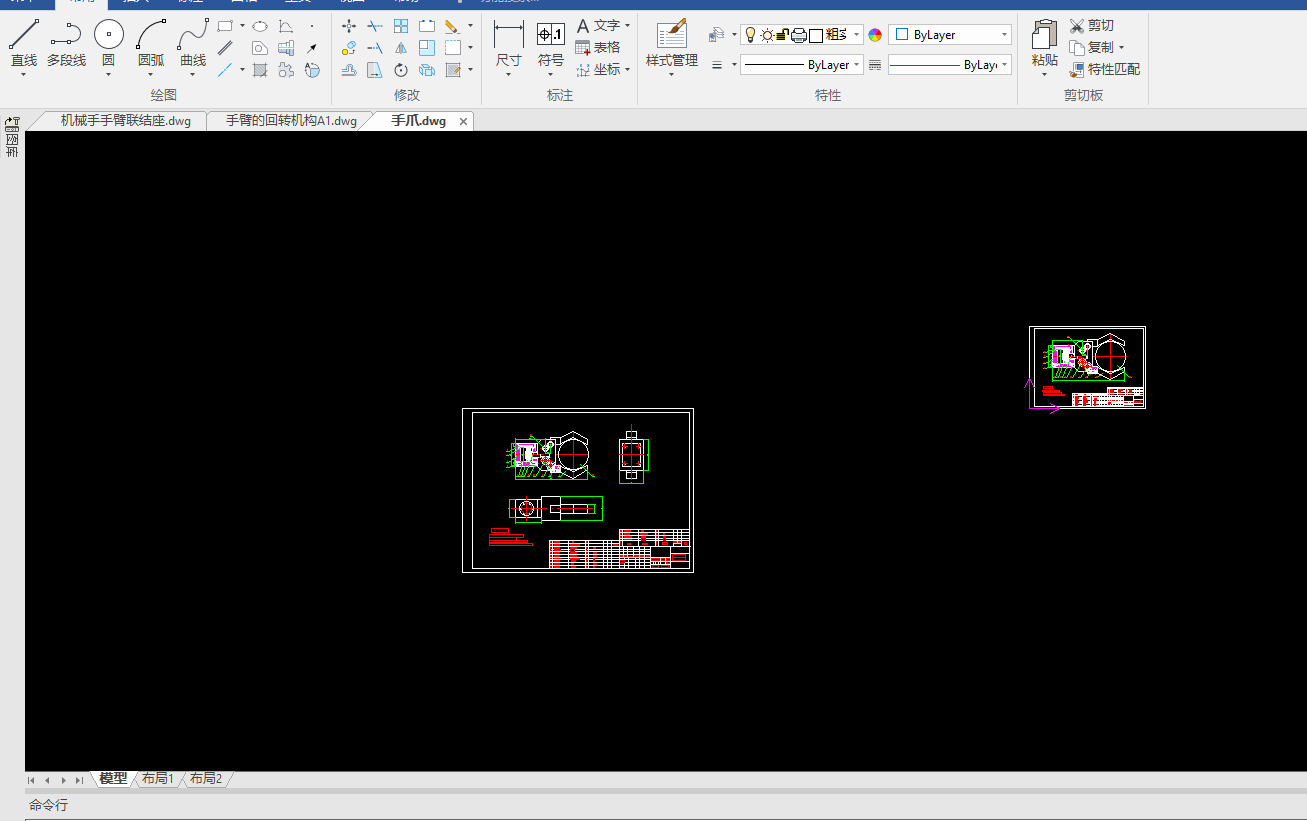
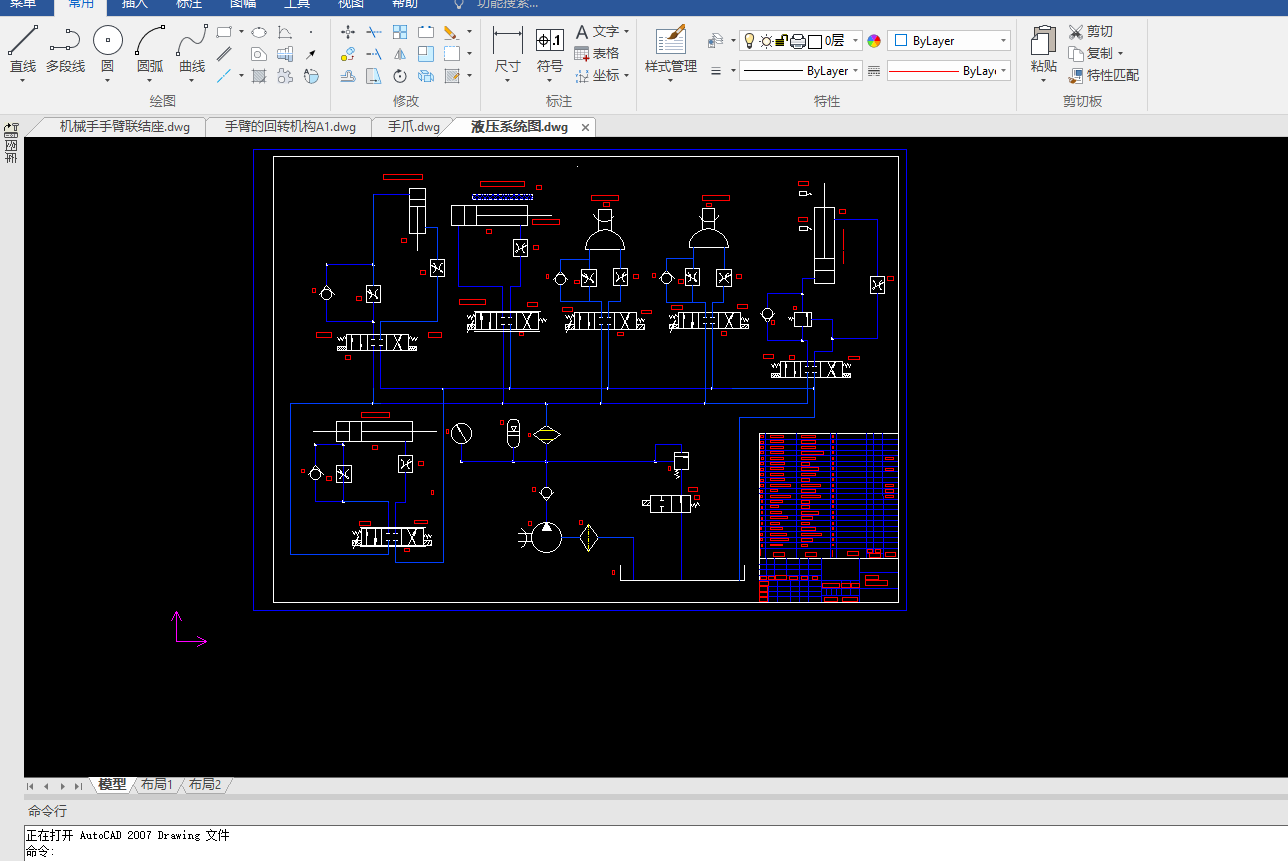
本次设计的四自由度自动上下料机构,基于数控车床的实际加工需求与空间布局,综合运用了机械设计、液压传动与控制等专业知识。机构的机械结构主要由油缸、螺杆、导向筒等机械器件组成,确保了运动的精确性和稳定性。在液压传动系统中,手臂的伸缩、手腕的回转、立柱的转动、机构的升降以及立柱的横移等功能均通过相应的油缸实现。通过控制电磁阀的开关,可以精确地控制机构进行相应的动作循环,从而实现自动上下料的功能。当按下连续停止按钮后,机构在完成一个动作循环后会停止运动,保证了操作的安全性和灵活性。
本研究旨在提高数控车床的加工效率,降低操作人员的劳动强度和安全风险。通过详细的设计、计算和仿真分析,验证了该自动上下料机构的可行性和有效性。同时,本研究还绘制了必要的装配图、液压系统图等工程图纸,为后续的制造和安装提供了详细的技术支持。
关键词:机构设计;液压传动;控制回路;数控车床;自动上下料
ABSTRACT
Aiming at the low loading efficiency, high labor intensity and high safety risk, this design proposes an economical automatic loading mechanism based on CNC lathe. The organization effectively improves the degree of production automation, can imitate people's hand movements, according to the operation requirements, according to the pre-determined procedures, trajectory, through the hydraulic system to achieve accurate grasping and handling operation.
The design of four degrees of freedom automatic loading and unloading mechanism, based on the actual processing requirements and spatial layout of CNC lathe, comprehensive use of mechanical design, hydraulic transmission and control and other professional knowledge. The mechanical structure of the mechanism is mainly composed of mechanical devices such as oil cylinder, screw and guide cylinder, which ensure the accuracy and stability of the movement. In the hydraulic transmission system, the stretching of the arm, the rotation of the wrist, the rotation of the column, the lifting of the mechanism and the transmovement of the column are all realized through the corresponding oil cylinder. By controlling the switch of the solenoid valve, the machine can be accurately controlled mechanism to perform the corresponding action cycle, so as to realize the function of automatic loading and unloading. When the continuous stop button is pressed, the mechanism will stop moving after completing an action cycle, ensuring the safety and flexibility of the operation.
This study aims to improve the processing efficiency of CNC lathe and reduce the labor intensity and safety risk of operators. The feasibility and effectiveness of the automatic loading and unloading mechanism are verified through detailed design, computation and simulation analysis. At the same time, this study also drew the necessary assembly drawings, hydraulic system drawings, which provided detailed technical support for the subsequent manufacturing and installation.
Key words: mechanism design; hydraulic drive; control loop; CNC lathe; automatic loading and unloading
目 录
摘 要
ABSTRACT
第一章 绪论
1.1基于数控车床的自动上下料机现状
1.2设计目的
1.3 国内外研究方向
1.4 设计原则
第二章 基于数控车床的自动上下料机构方案设计
2.1基于数控车床的自动上下料机构的总体设计
2.1.1 机构总体结构的类型
2.1.2 设计具体采用方案
2.2 机构腰座结构的设计
2.2.1 机构腰座结构的设计要求
2.2.2 设计具体采用方案
2.3 机构手臂的结构设计
2.3.1 机构手臂的设计要求
2.3.2 设计具体采用方案
2.4 机构腕部的结构设计
2.4.1 机器手手腕结构的设计要求
2.4.2设计具体采用方案
2.5机构末端执行器(手爪)的结构设计
2.5.1机构末端执行器的设计要求
2.5.2机器人夹持器的运动和驱动方式
2.5.3 机器人夹持器的典型结构
2.5.4设计具体采用方案
2.6机构的机械传动机构的设计
2.6.1工业机器人传动机构设计应注意的问题
2.6.2工业机器人常用的传动机构形式
2.6.3 设计具体采用方案
2.7机构驱动系统的设计
2.7.1机器手各类驱动系统的特点
2.7.2机器手液压驱动系统
2.7.3 机器人气动驱动系统
2.7.4机器手电动驱动系统
2.7.5设计具体采用方案
第3章 理论分析和设计计算
3.1本机构的动作范围确定如下:
3.2 确定运动速度
3.3确定液压系统的主要参数
3.3.1计算液压缸的总机械载荷
3.3.2手爪执行液压缸工作压力计算
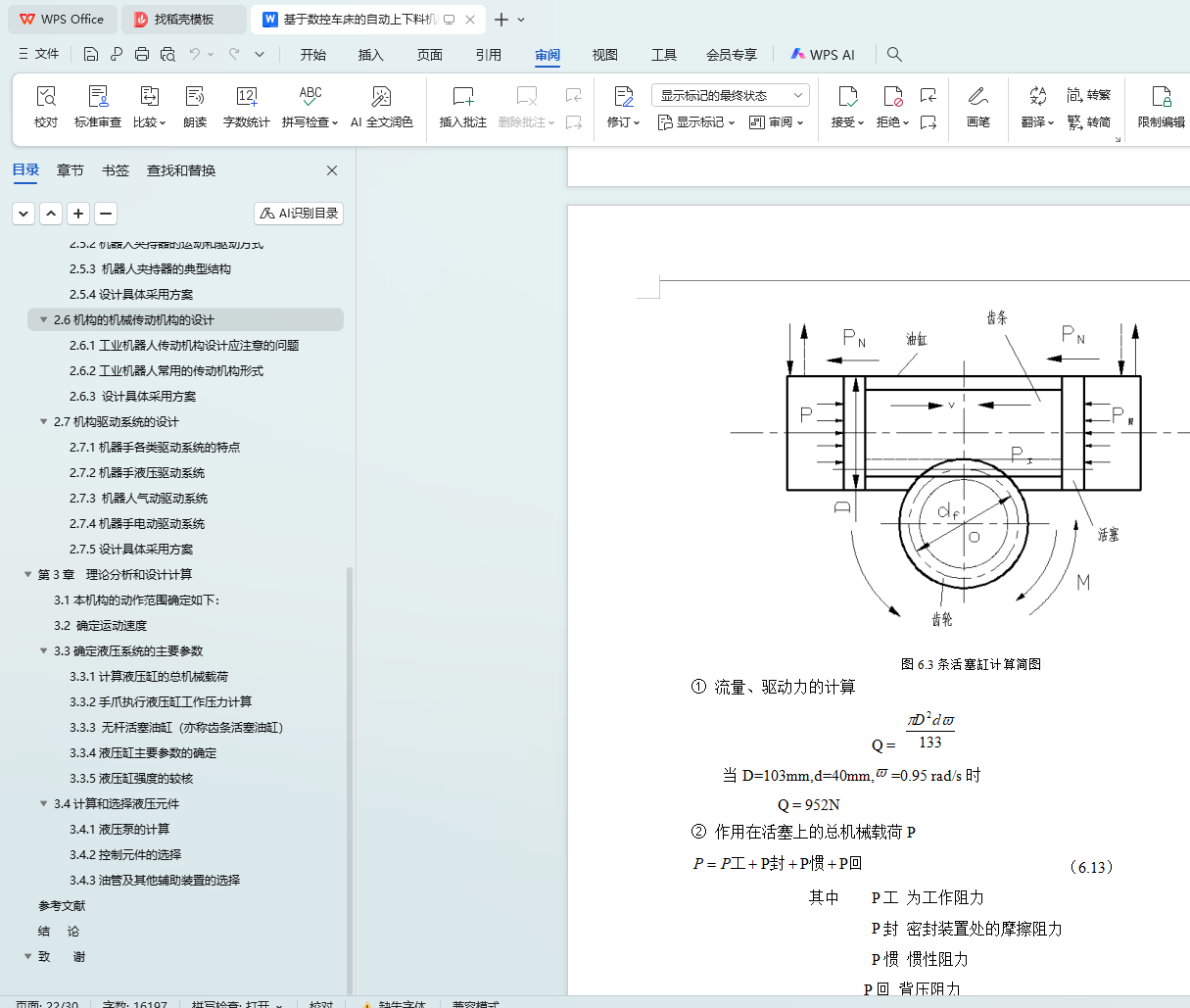
3.3.3 无杆活塞油缸(亦称齿条活塞油缸)
3.3.4液压缸主要参数的确定
3.3.5液压缸强度的较核
3.4计算和选择液压元件
3.4.1液压泵的计算
3.4.2控制元件的选择
3.4.3油管及其他辅助装置的选择
参考文献
结 论
致 谢