目 录
目 录
摘 要
Abstract
第一章 绪论
1.1 研究的目的及意义
1.2 机械手在国内外现状和发展趋势
1.3 主要研究的内容
1.4 解决的关键问题
第二章 可编程控制PLC
2.1 PLC 简介
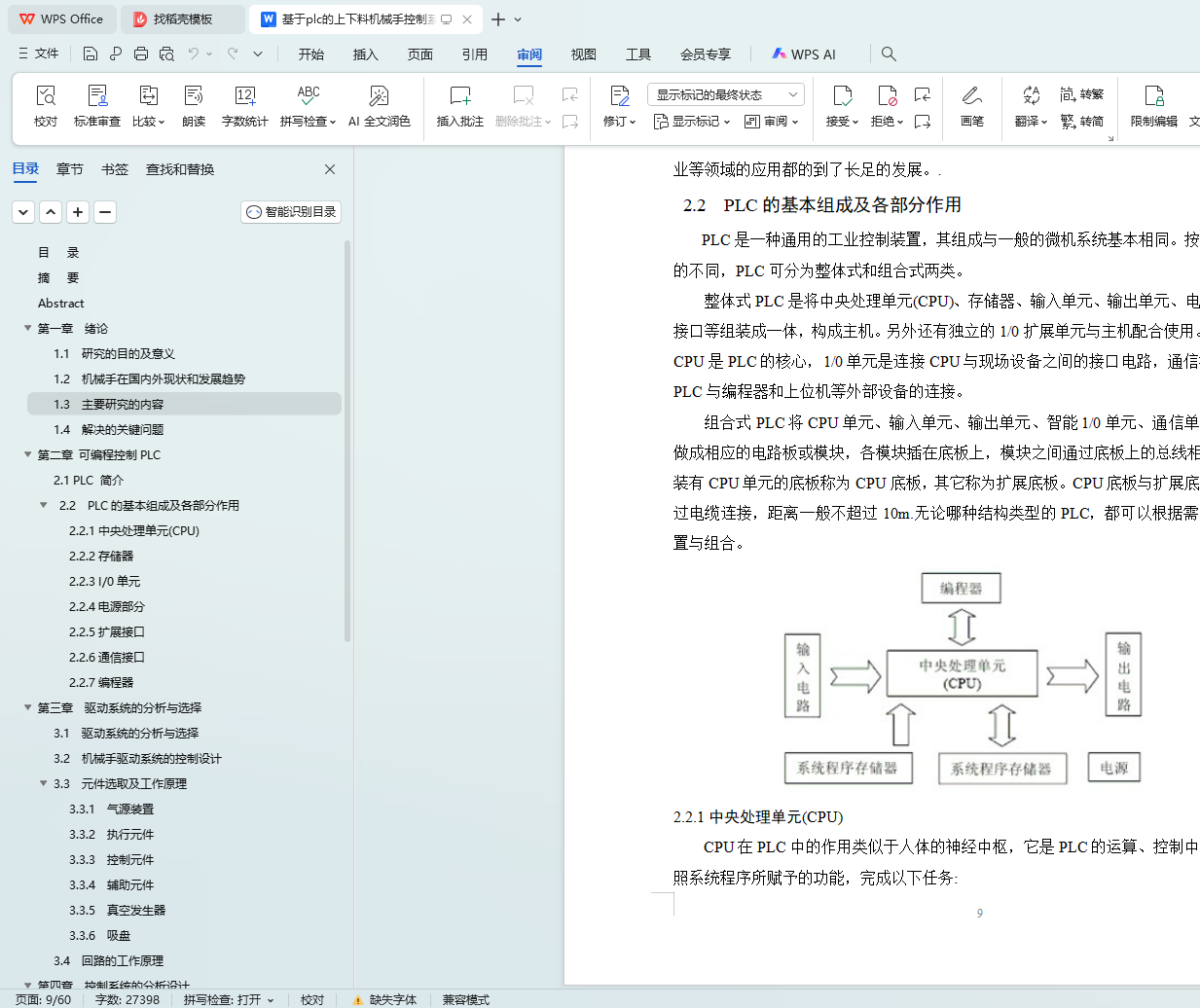
2.2 PLC的基本组成及各部分作用
2.2.1中央处理单元(CPU)
2.2.2存储器
2.2.3 I/0单元
2.2.4电源部分
2.2.5扩展接口
2.2.6通信接口
2.2.7编程器
第三章 驱动系统的分析与选择
3.1 驱动系统的分析与选择
3.2 机械手驱动系统的控制设计
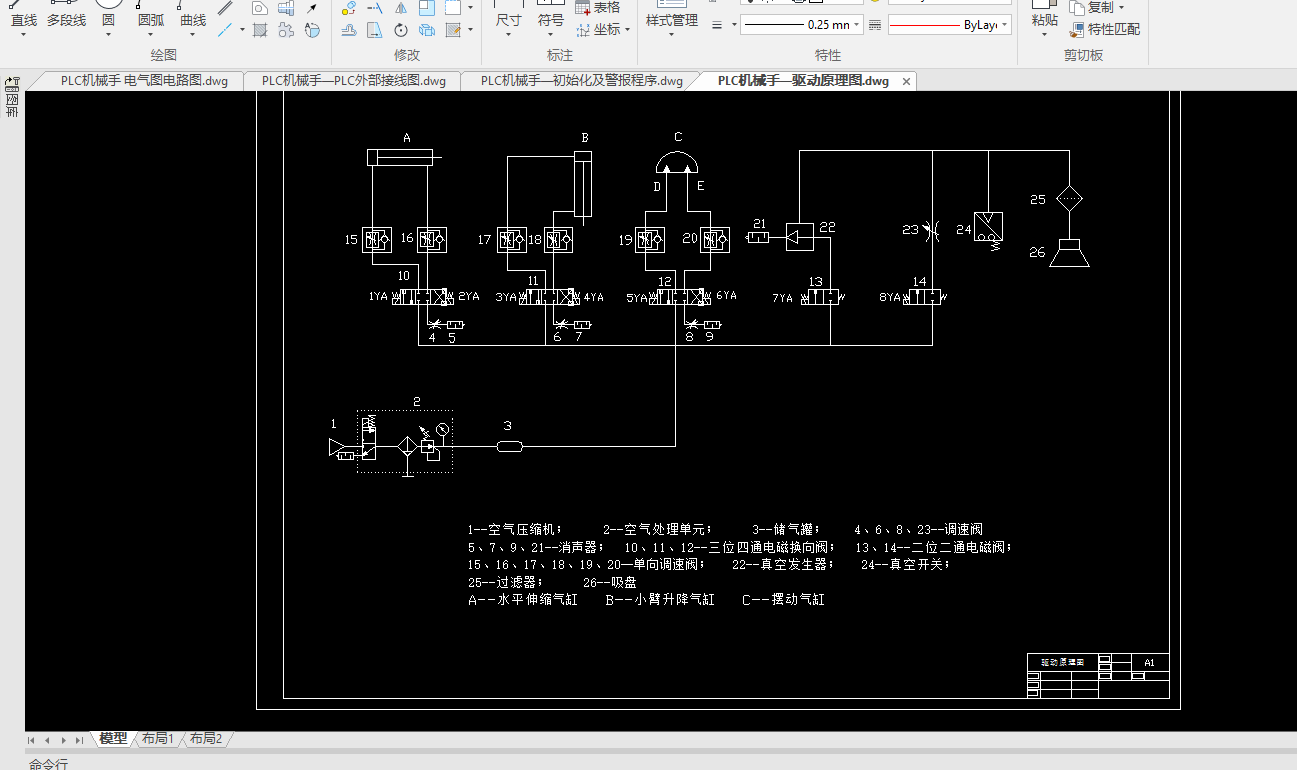
3.3 元件选取及工作原理
3.3.1 气源装置
3.3.2 执行元件
3.3.3 控制元件
3.3.4 辅助元件
3.3.5 真空发生器
3.3.6 吸盘
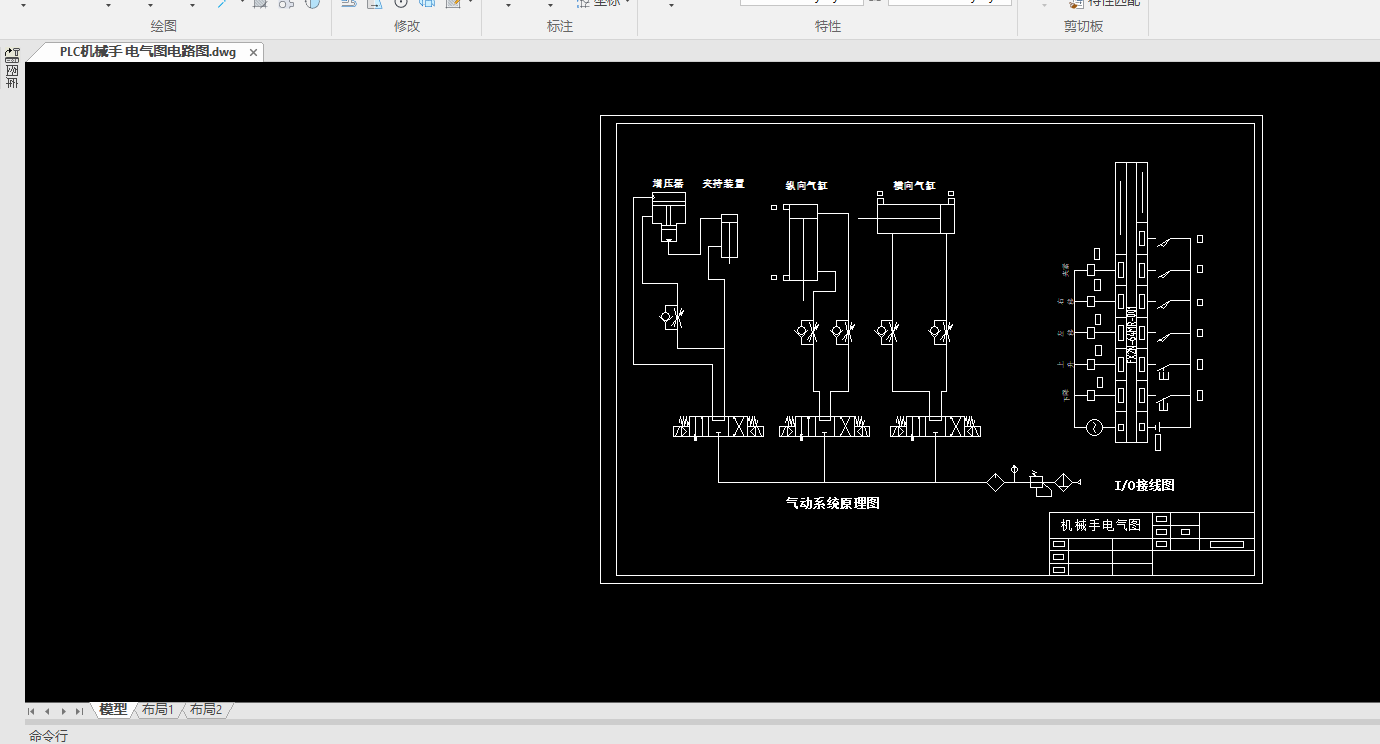
3.4 回路的工作原理
第四章 控制系统的分析设计
4.1 控制系统的组成结构
4.2 控制系统的性能要求
4.3 传感器的选择
4.3.1 位置检测装置
4.3.2 滑觉传感器
4.3.3 视觉传感器
4.4 控制系统PLC的选型及控制原理
4.4.1 PLC控制系统设计的基本原则
4.4.2 PLC种类及型号选择
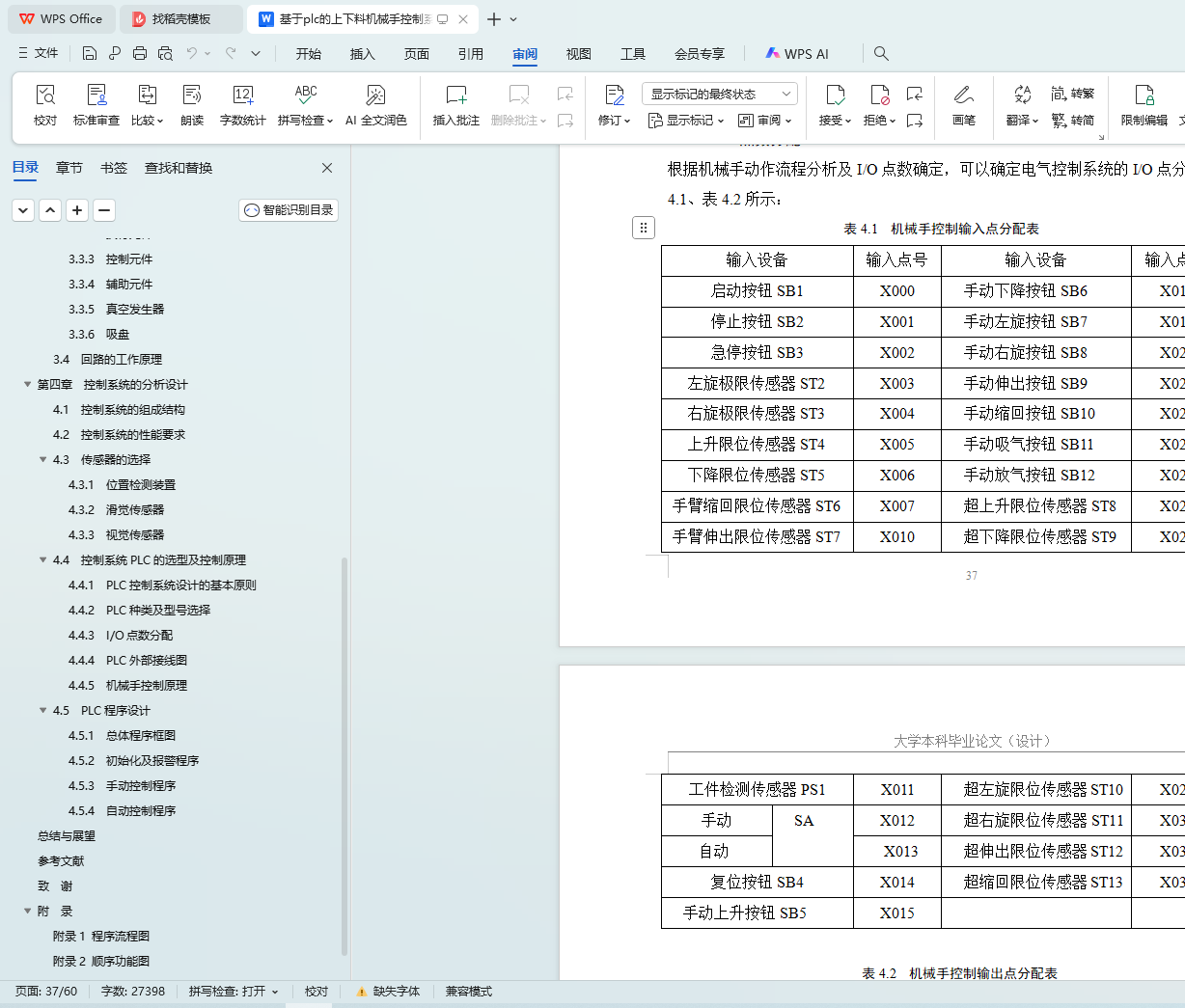
4.4.3 I/O点数分配
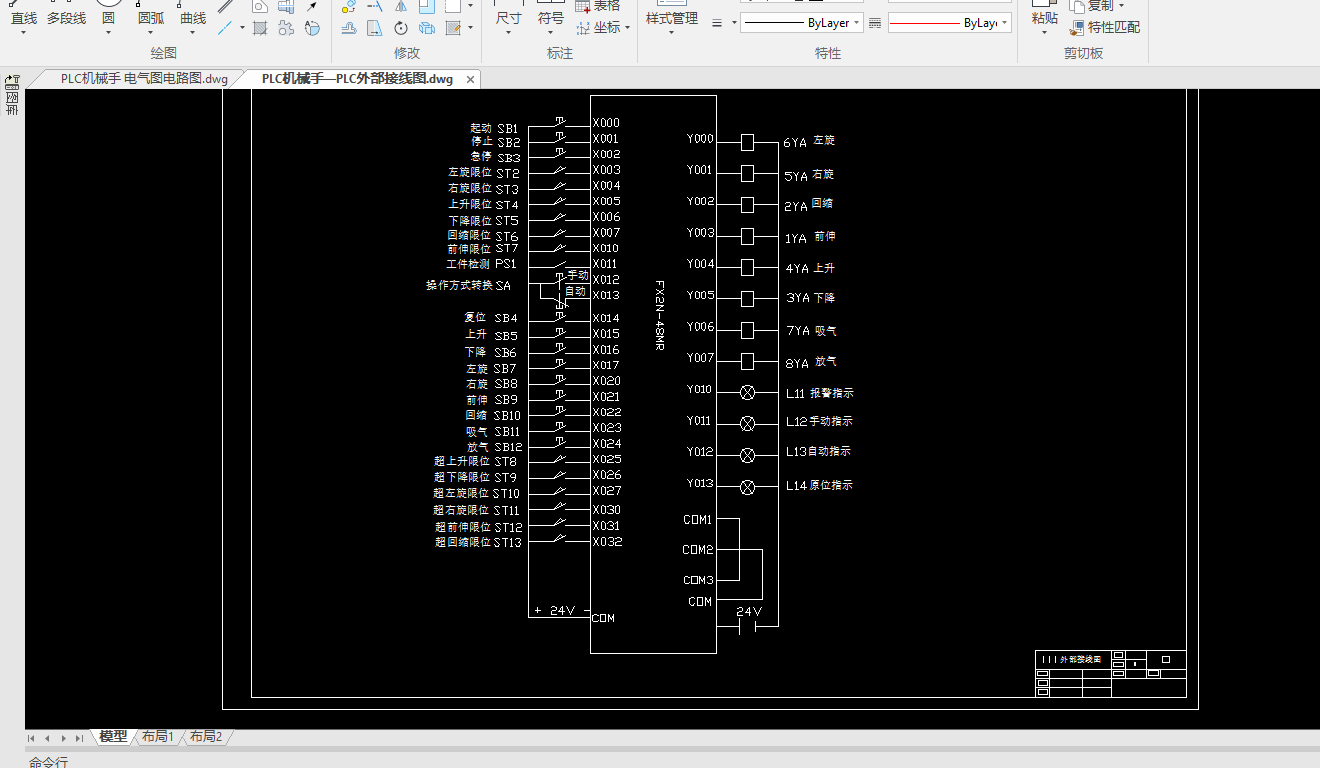
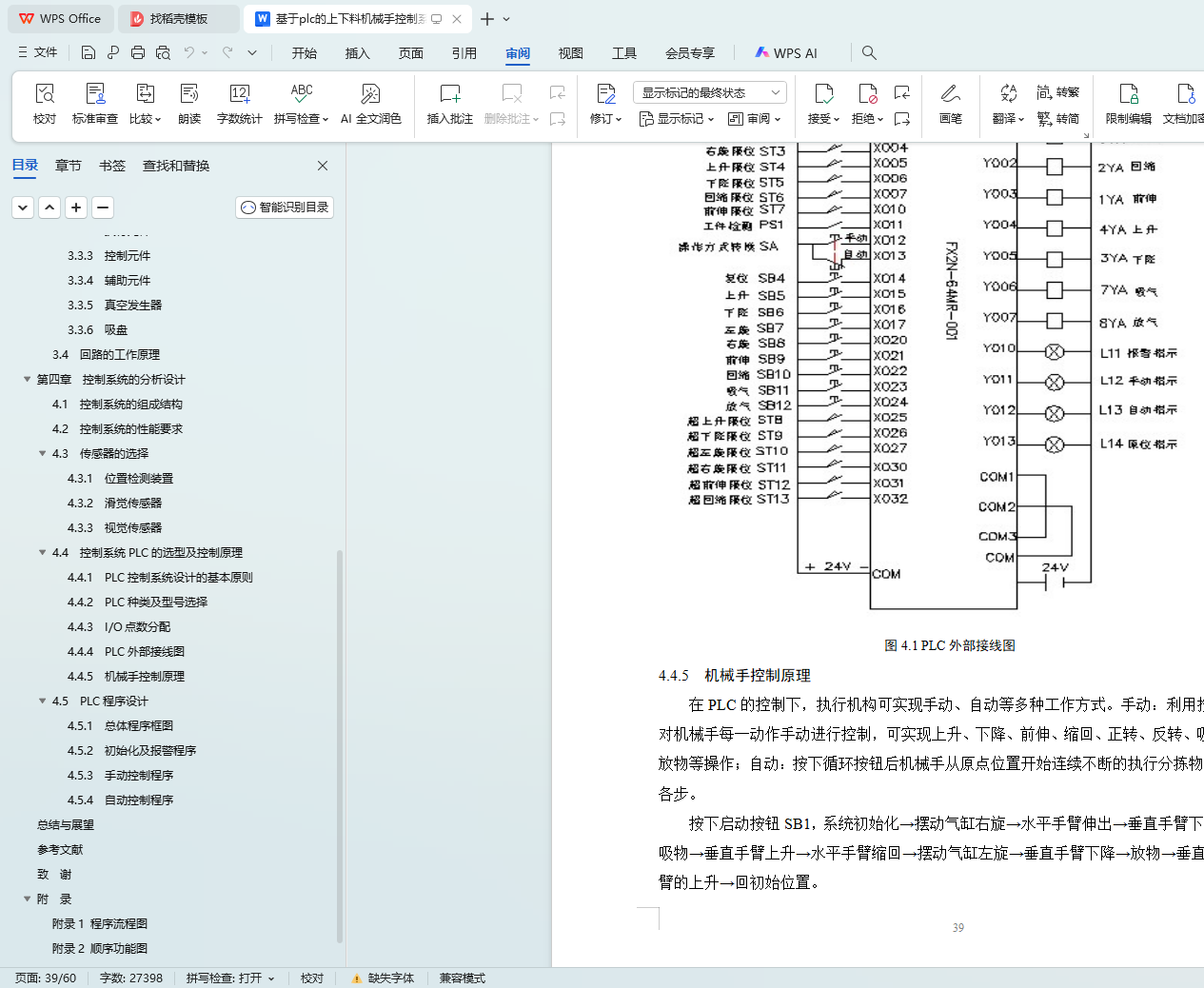
4.4.4 PLC外部接线图
4.4.5 机械手控制原理
4.5 PLC程序设计
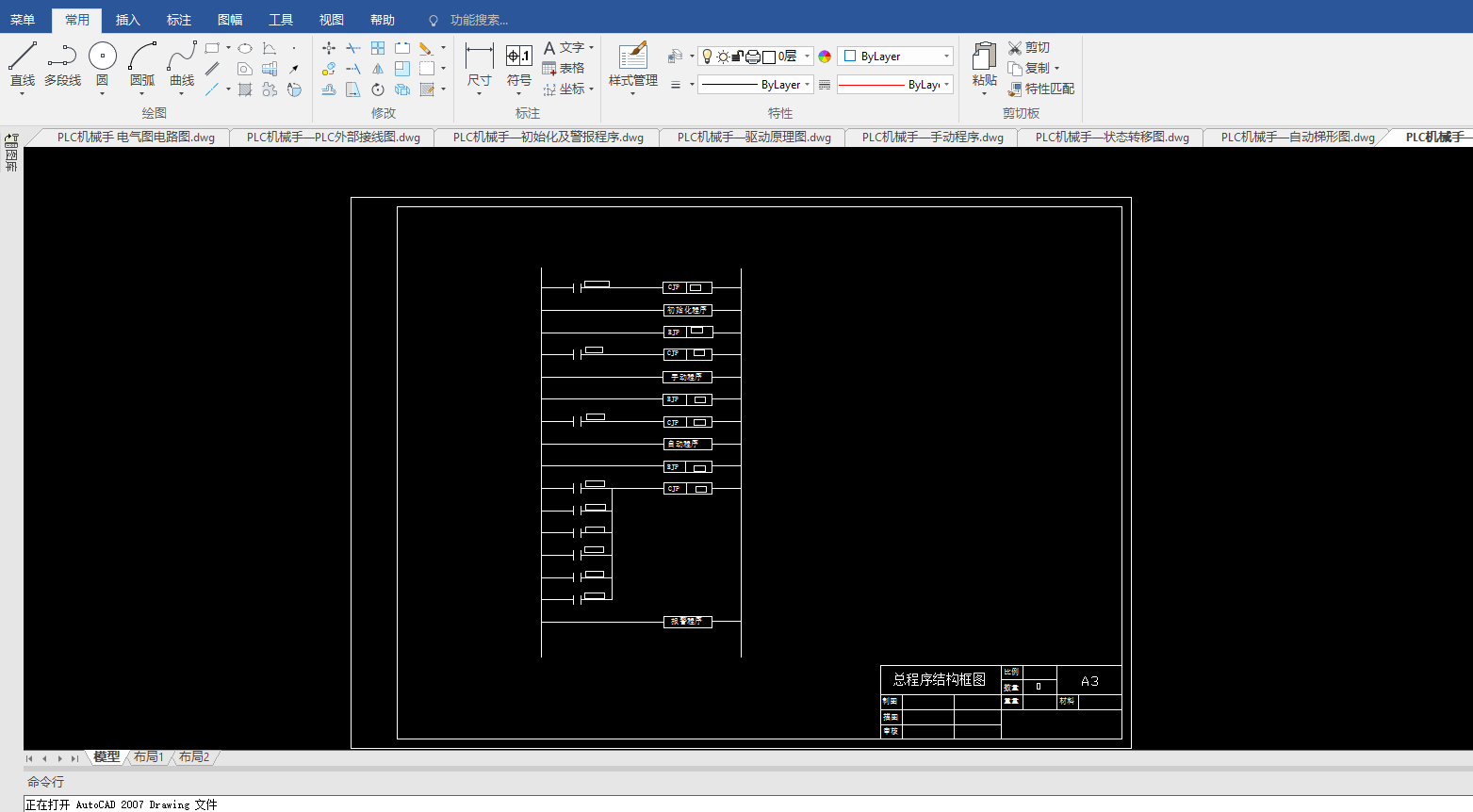
4.5.1 总体程序框图
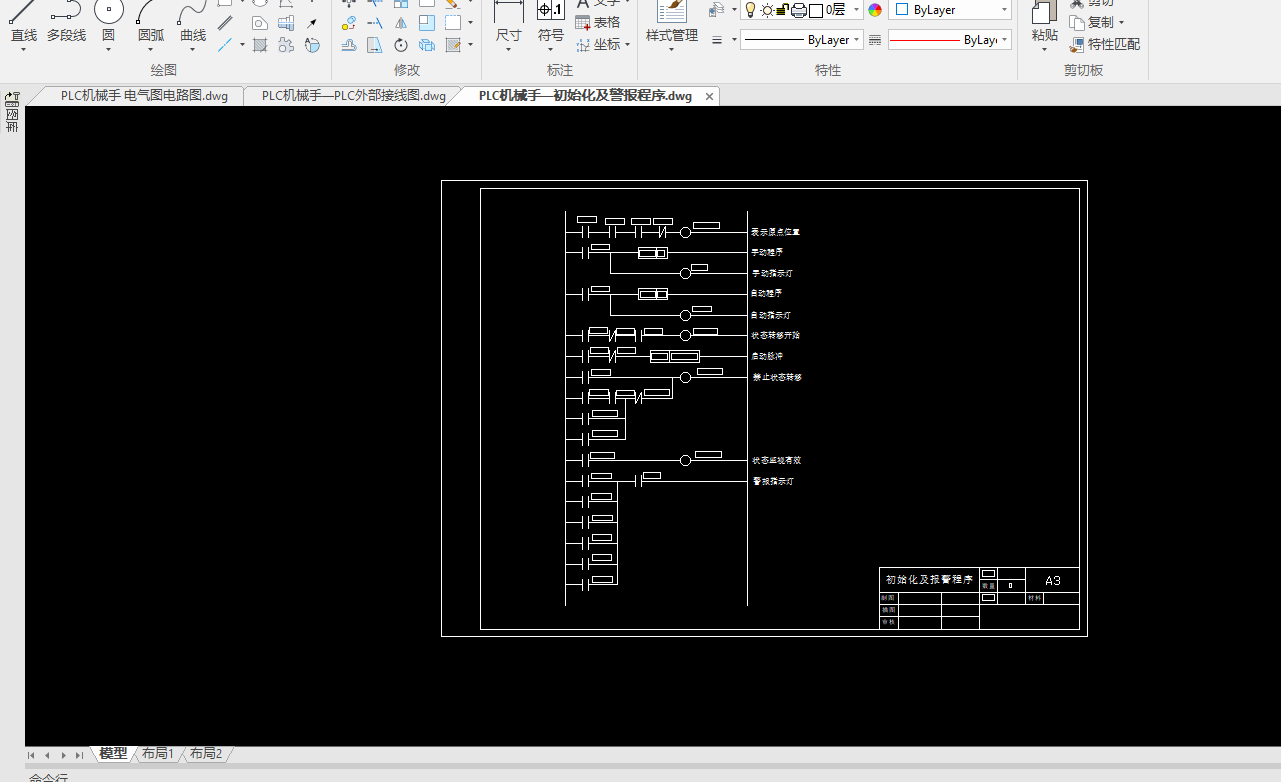
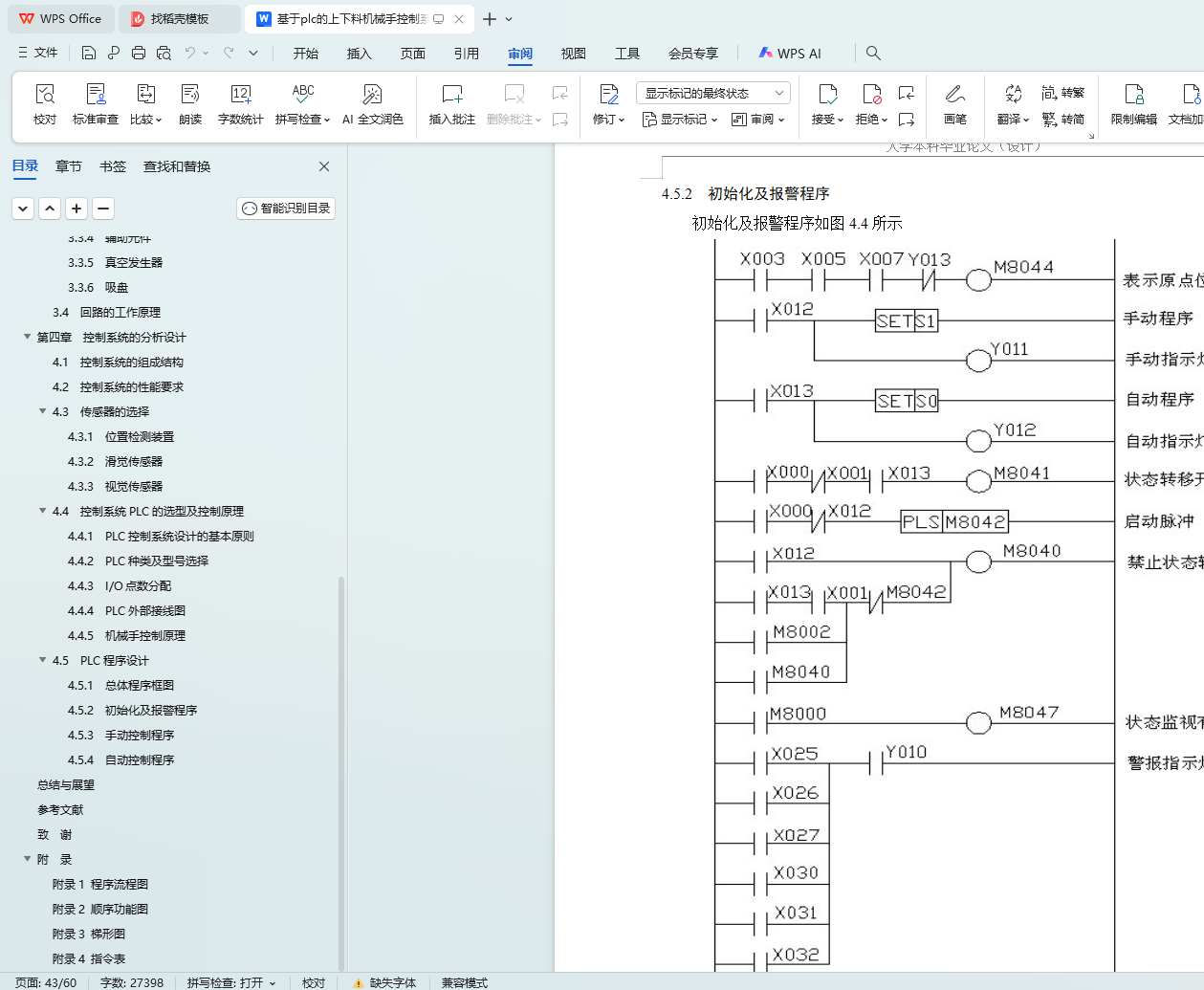
4.5.2 初始化及报警程序
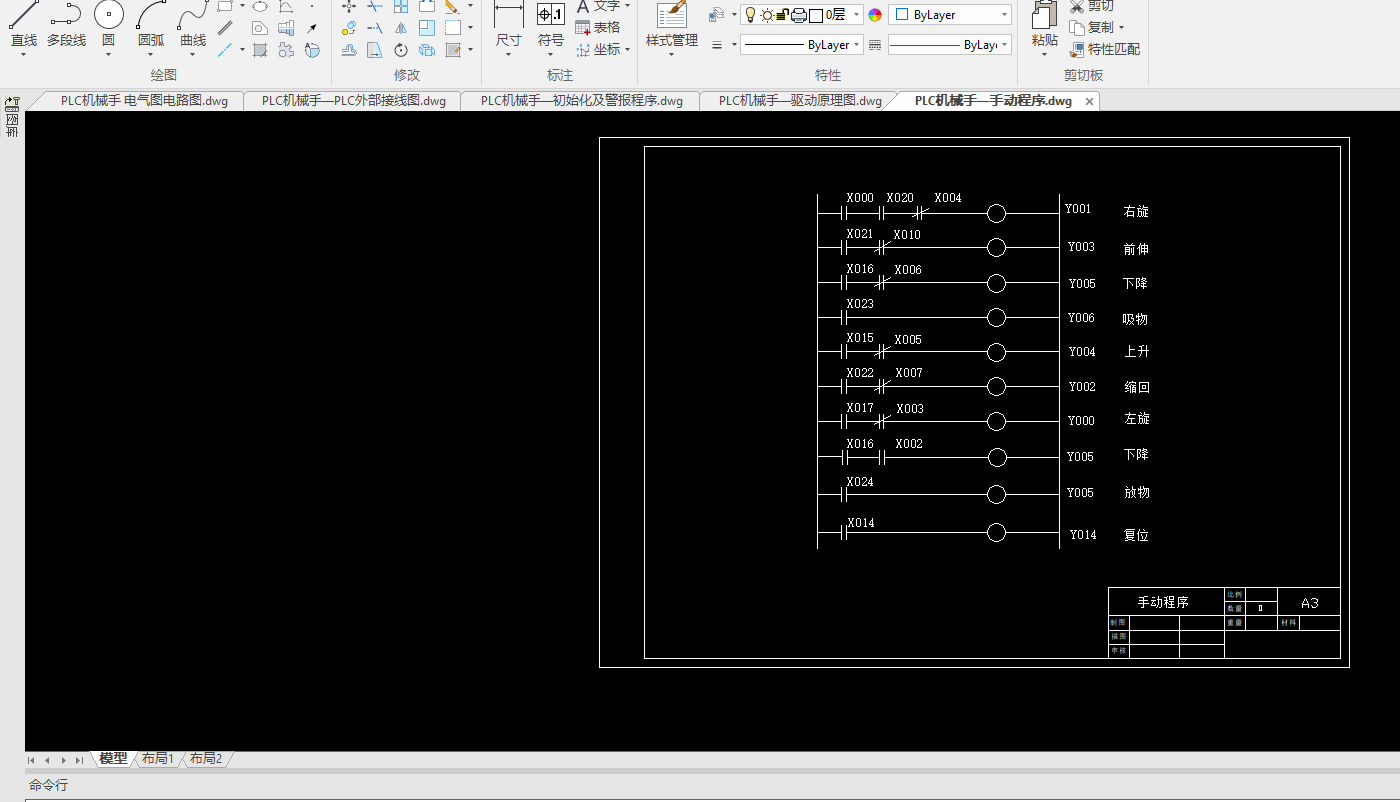
4.5.3 手动控制程序
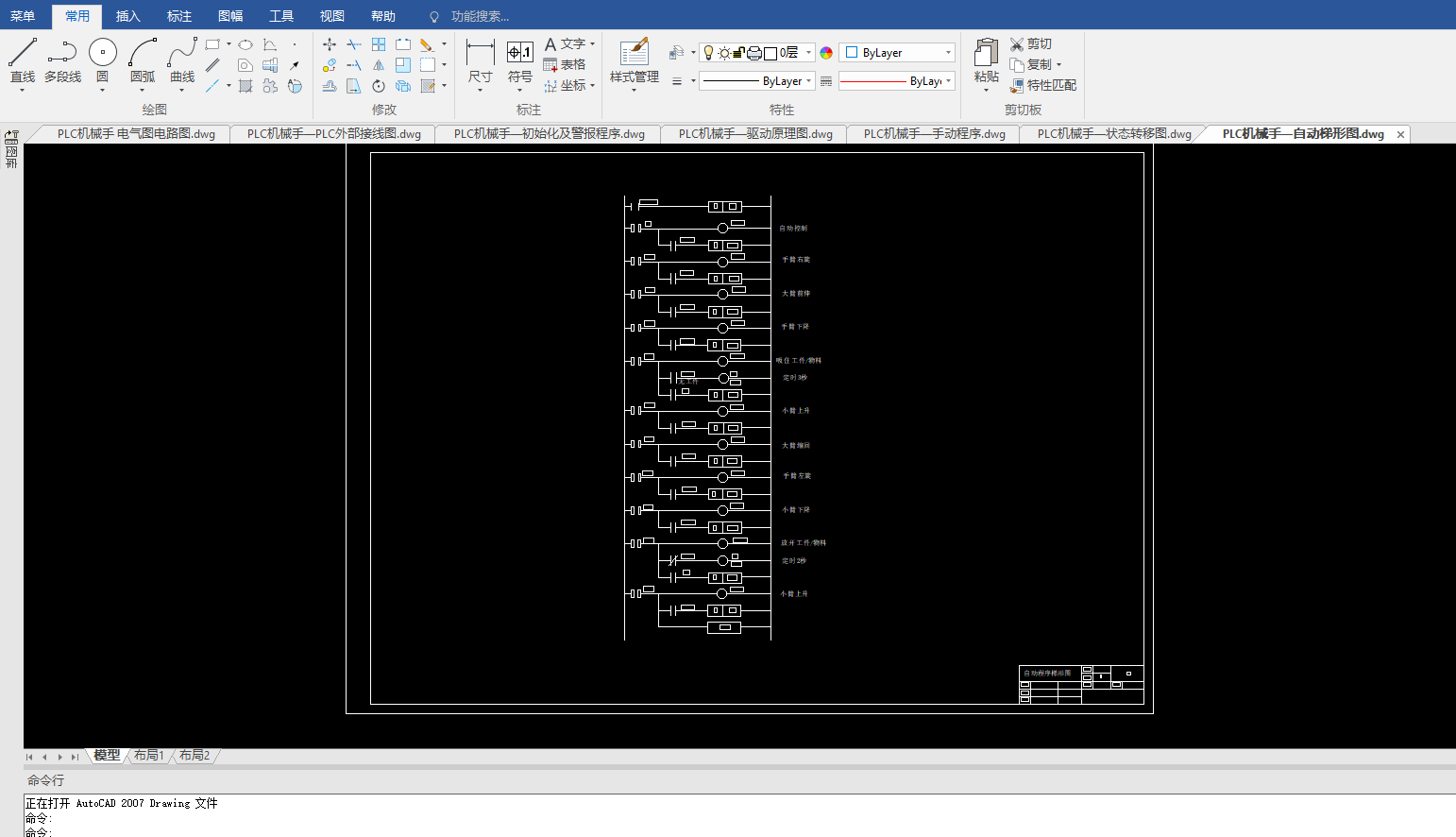
4.5.4 自动控制程序
第五章 总结与展望
参考文献
致 谢
附 录
附录1 程序流程图
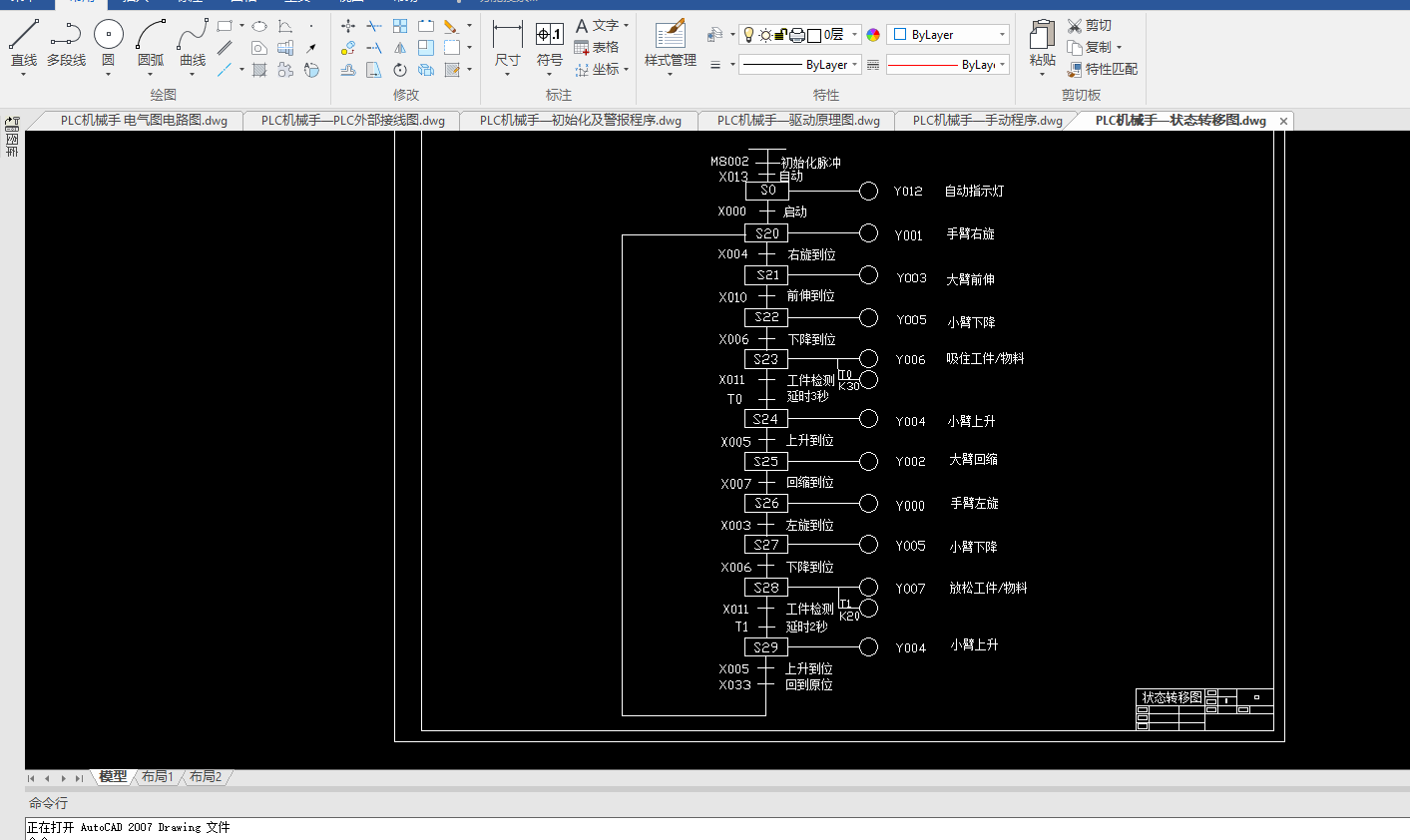
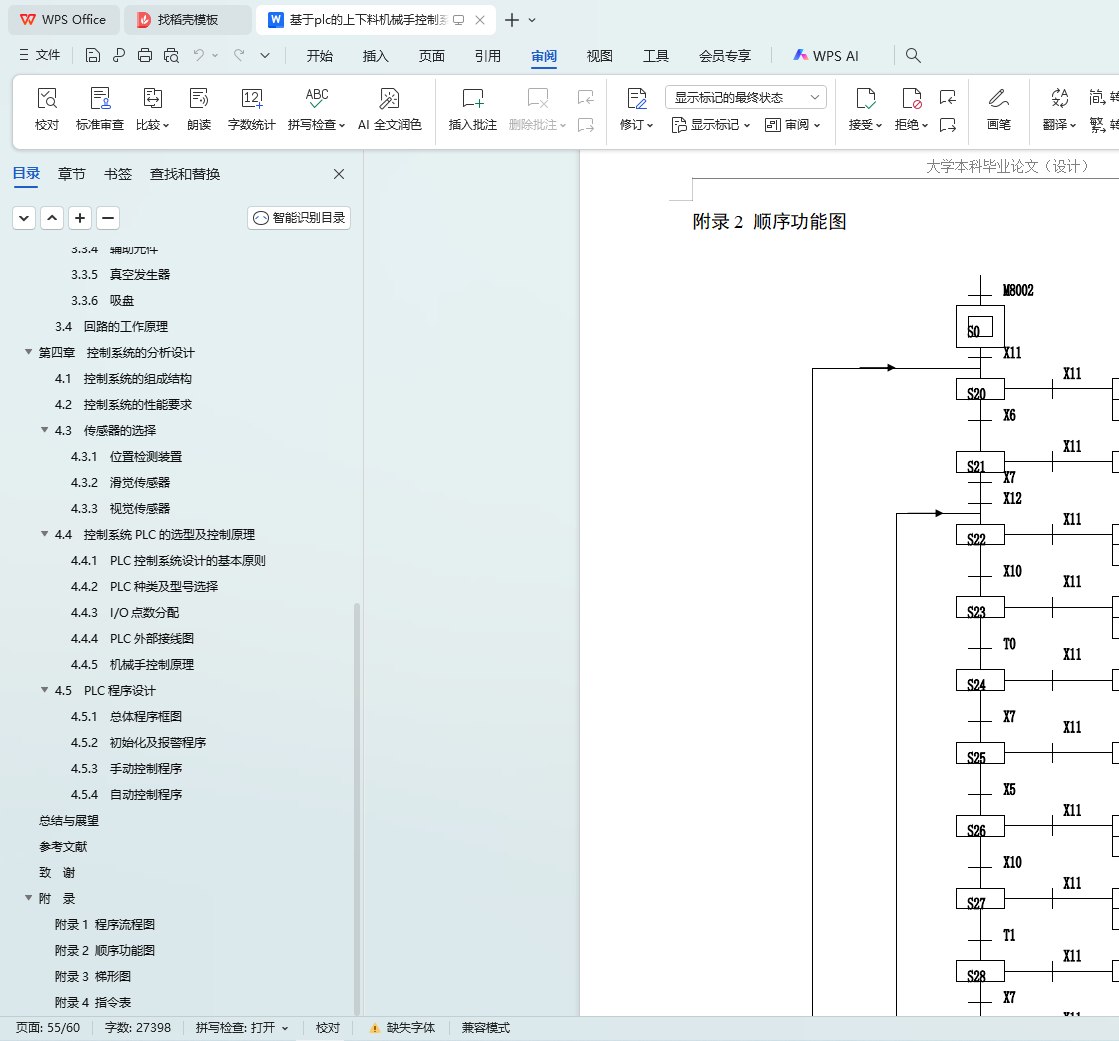
附录2 顺序功能图
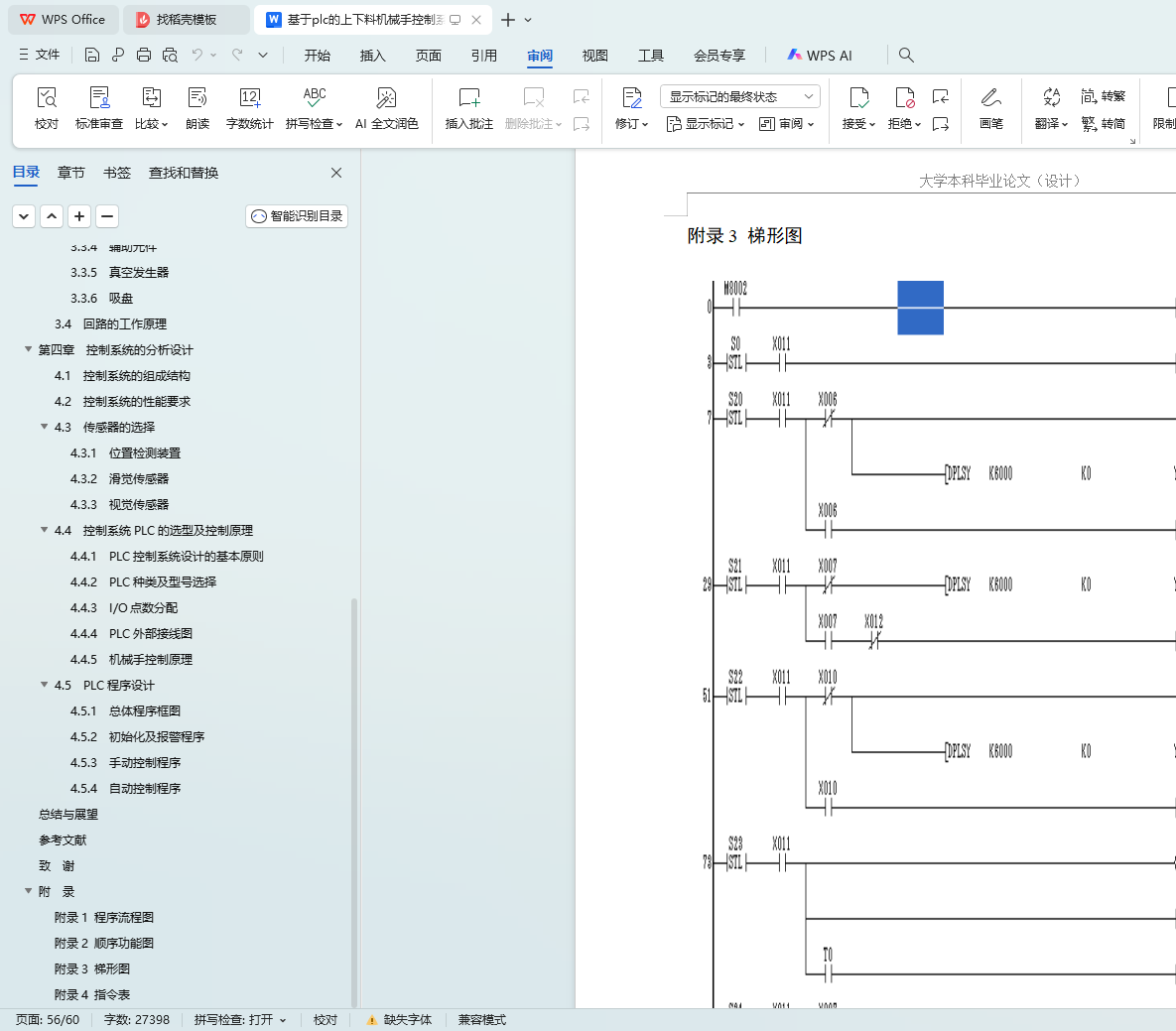
附录3 梯形图
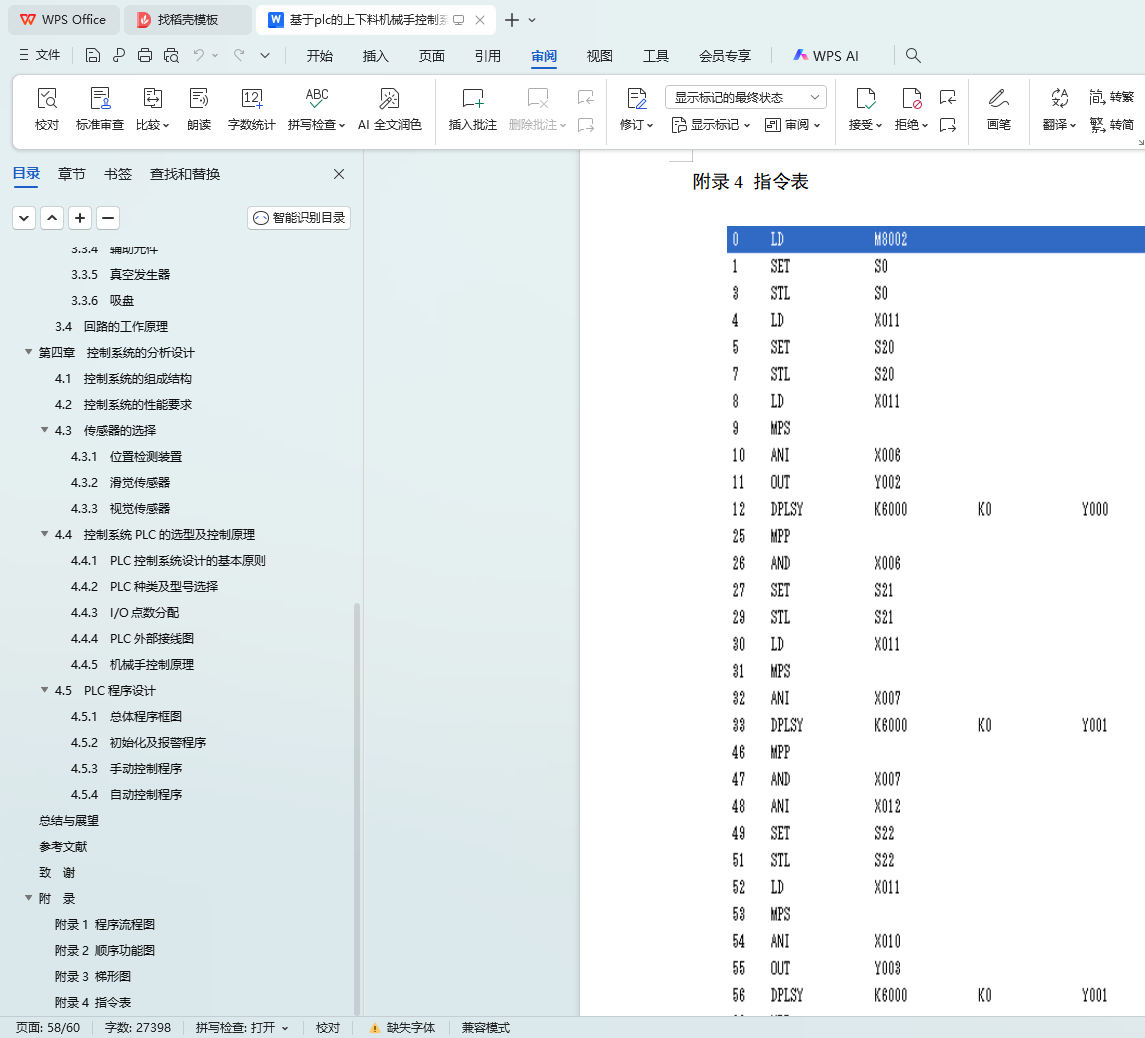
附录4 指令表
摘 要
本文旨在设计一种基于可编程逻辑控制器(PLC)的上下料机械手控制系统。该系统结合了先进的可编程控制技术、位置控制技术和检测技术,是机电一体化的重要应用之一。机械手采用滚珠丝杆、滑杆等机械器件构建其机械结构,并通过交流电机、变频器、传感器等电子器件实现电气控制。本系统通过PLC输出脉冲信号,驱动横轴和竖轴的变频器,实现机械手的精确定位。位置信号由微动开关和接近开关反馈给PLC,通过控制交流电机的正反转,实现机械手手爪的张合动作,从而完成物料的搬运任务。该机械手具有动作灵活多样、可适应不同工件及运动流程要求的特点,能够在高温和危险作业区代替人工进行作业,并可根据实际需求随时调整相关参数。
本文在综合分析近年来机械手发展状况的基础上,结合具体设计要求,对机械手的整体结构、执行机构、驱动系统和控制系统进行了详细的分析与设计。在驱动系统中,选用了高效的驱动元件;在控制系统中,采用了PLC作为核心控制单元,实现了系统功能的初始化、机械手的移动控制、故障报警等功能。通过优化软硬件设计,提出了一种简单、易于实现且理论意义明确的控制策略。
本研究最终提出了一种经济型、实用型、高可靠性的机械手设计方案,不仅满足了上下料作业的实际需求,也为其他经济型PLC控制系统的设计提供了有益的参考。
关键词: 机械手;交流电机;可编程逻辑控制器(PLC);自动化控制;系统设计
Abstract
The purpose of this paper is to design a loading manipulator control system based on programmable logic controller (PLC). The system combines advanced programmable control technology, position control technology and detection technology, and is one of the important applications of mechatronics. The manipulator uses mechanical devices such as ball-wire rod and slide rod to construct its mechanical structure, and realizes electrical control through electronic devices such as AC motor, frequency converter and sensor. The system output pulse signal through PLC and drives the frequency converter of horizontal and vertical shaft to realize the precise positioning of the manipulator. The position signal is fed back to the PLC by the micro switch and proximity switch. By controlling the positive and reverse of the AC motor, the opening action of the manipulator claw is realized, so as to complete the task of material handling. The manipulator has the characteristics of flexible and diverse movements, can adapt to the requirements of different workpiece and movement process, can replace manual operation in high temperature and dangerous operation areas, and can adjust the relevant parameters at any time according to the actual needs.
Based on the comprehensive analysis of the development situation of the manipulator in recent years, combined with the specific design requirements, the overall structure, actuator, drive system and control system of the manipulator are analyzed and designed in detail. In the drive system, the control system uses PLC as the core control unit to initiate the system function, mobile control of manipulator, fault alarm and other functions. By optimizing the hardware and software design, a simple, easy to implement and theoretically clear control strategy is proposed.
This study finally proposes an economical, practical and highly reliable manipulator design scheme, which not only meets the actual needs of loading and unloading operation, but also provides a useful reference for the design of other economical PLC control systems.
Key words: manipulator; AC motor; programmable logic controller (PLC); automatic control; system design