摘 要
随着消防安全的日益重要和机器人技术的快速发展,传统的人工巡检消防管道的方式已经难以满足现代消防工作的需求。人工巡检存在效率低、成本高、安全性不足等问题,特别是在复杂或危险的环境中,这些问题尤为突出。因此,研制一套步履式消防管道巡检机器人,旨在提高消防管道巡检的效率和安全性,降低巡检成本,具有重要的现实意义和应用价值。
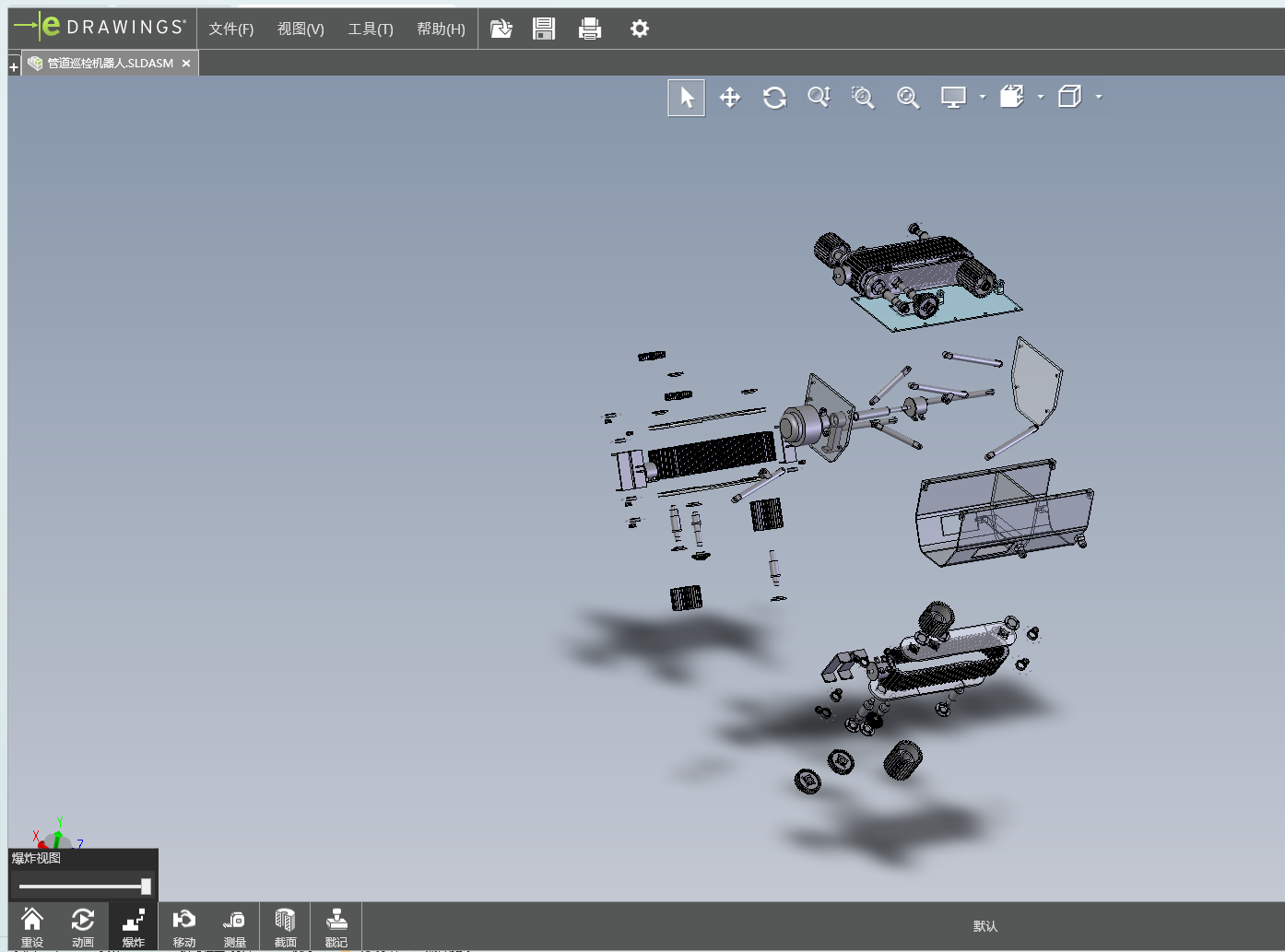
本选题的目的在于,通过深入研究和设计,开发出一套能够适应消防管道复杂环境、具备自主行走和巡检能力的机器人系统。该系统将结合国内外研究现状,对比分析不同技术的优缺点,制定出详细的时间规划表,明确各阶段的任务和时间节点。在机械设计方面,将确保整体结构符合使用要求,主要部件设计有必要的公式推导与计算,以保证机器人的稳定性和可靠性。同时,将绘制规范的图纸,准确标注尺寸和注释说明,以确保图纸的规范性、准确性和可读性。此外,还将构建准确的三维模型,反映设计对象的尺寸、形状和结构,确保各部件之间的比例关系正确,为后续的生产和制造提供有力支持。
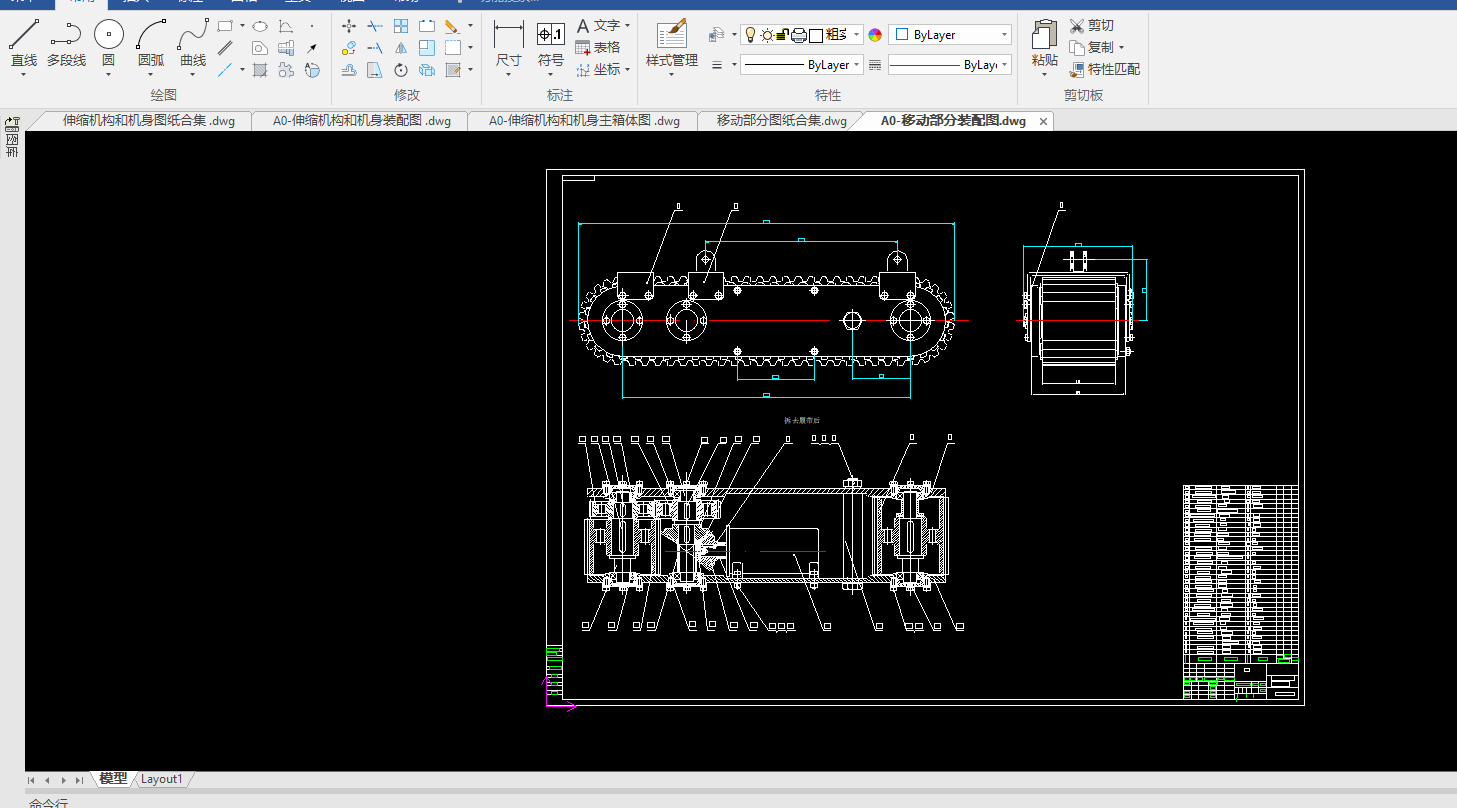
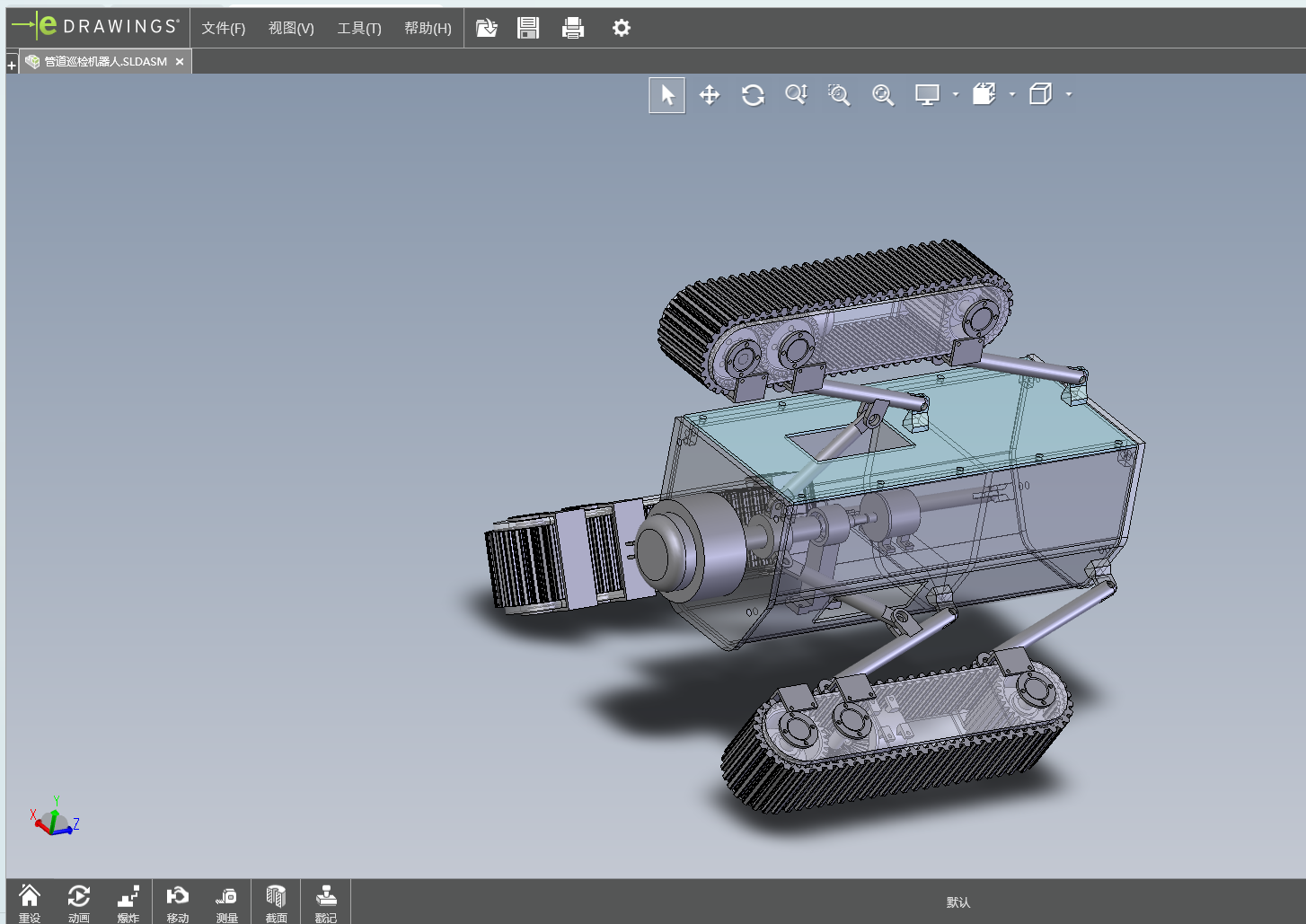
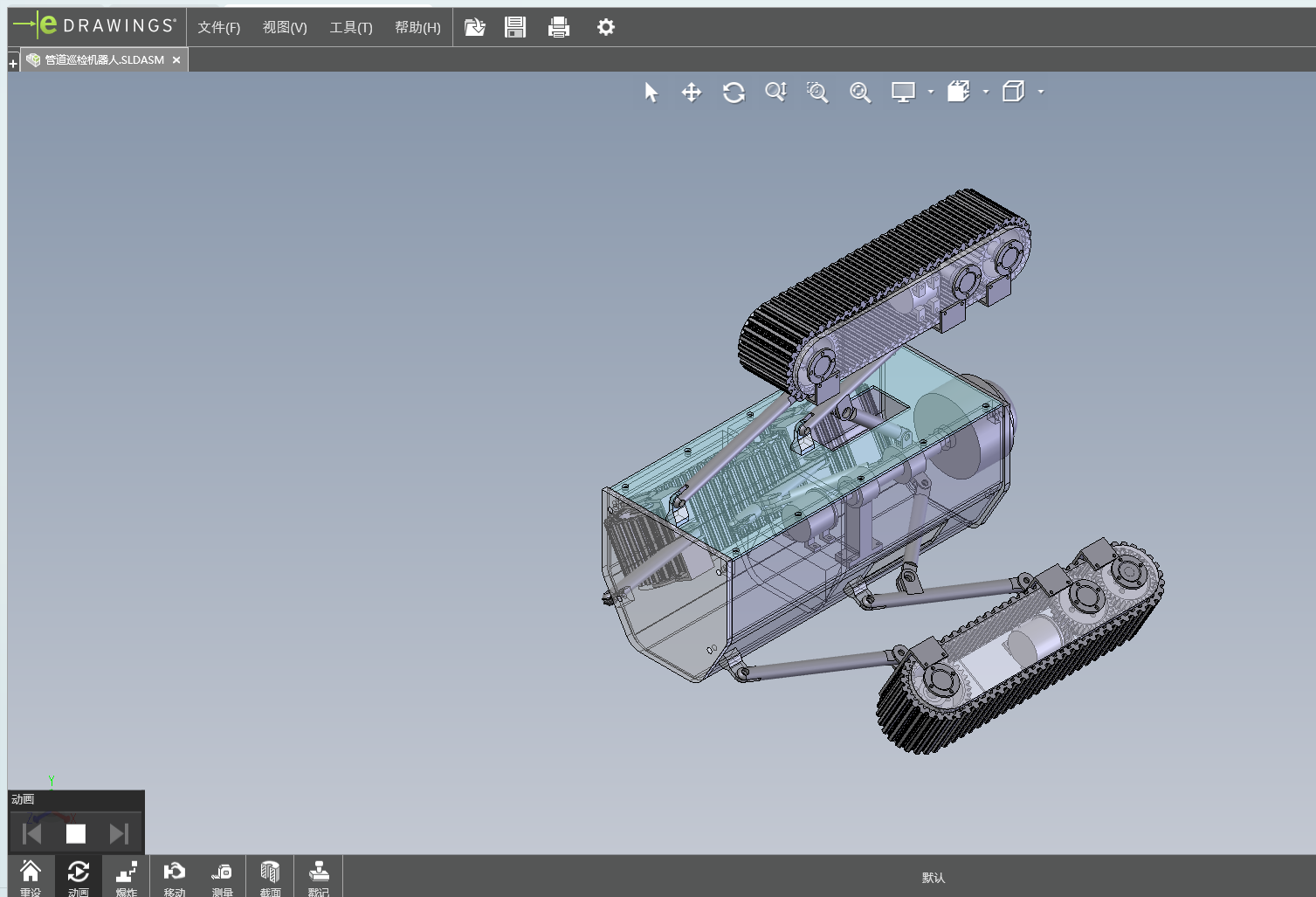
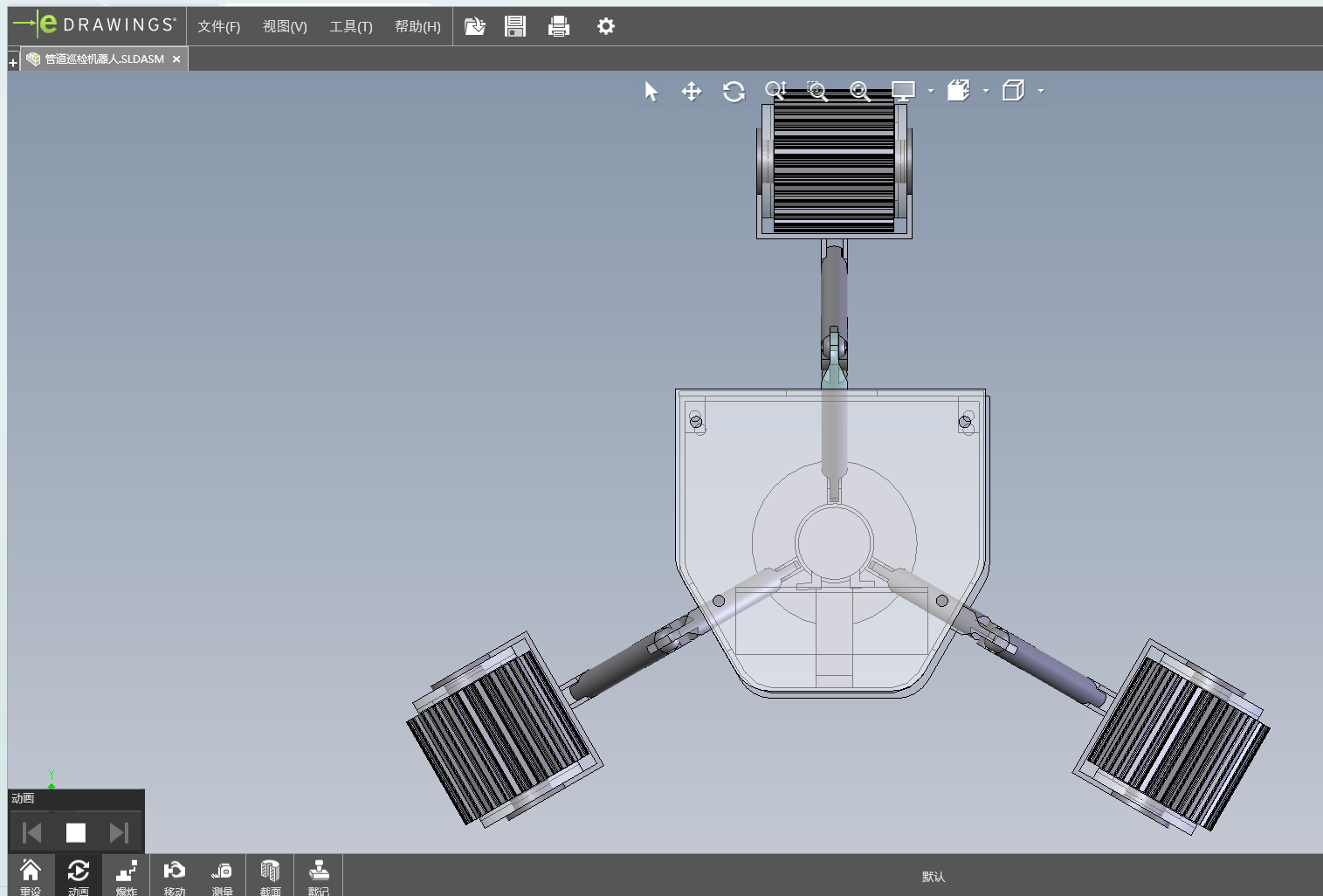
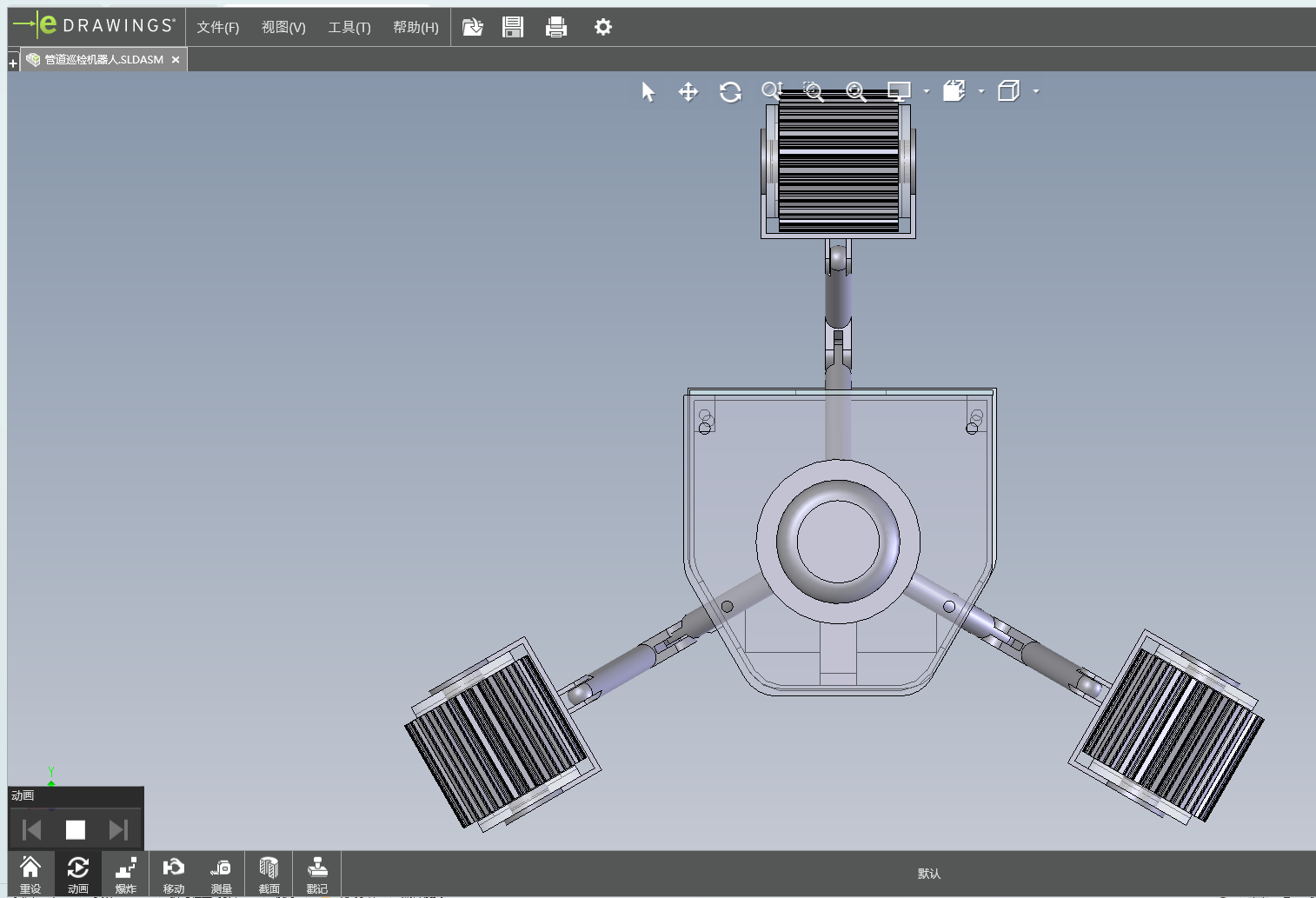
本文首先阐述了机器人的发展历程、国内外应用现状及巨大优越性,随后提出了具体的机器人设计要求。在此基础上,本文进行了机器人系统的总体方案设计和各自由度具体结构设计、计算,并重点设计了伸缩机构和机身结构。本研究旨在为消防管道的巡检提供一种高效、可靠的机器人解决方案。
关键字:步履式;消防管道;巡检机器人;结构设计;机械结构
Abstract
With the increasing importance of fire safety and the rapid development of robot technology, the traditional manual inspection of fire pipeline has been difficult to meet the needs of modern fire fighting work. Manual inspection has some problems, such as low efficiency, high cost and insufficient safety, especially in the complex or dangerous environment. Therefore, the development of a set of walking fire pipeline inspection robot aims to improve the efficiency and safety of fire pipeline inspection, reduce the inspection cost, has important practical significance and application value.
The purpose of this topic is to develop a robot system that can adapt to the complex environment of the fire pipeline and walk and inspect independently through in-depth research and design. The system will combine the current status of research at home and abroad, compare and analyze the advantages and disadvantages of different technologies, formulate a detailed time planning table, and clarify the tasks and time nodes of each stage. In terms of mechanical design, it will ensure that the overall structure meets the requirements of use, and derive and calculate the necessary formulas for the main components to ensure the stability and reliability of the robot. At the same time, standard drawings will be drawn with accurate dimensions and notes to ensure the standardization, accuracy and readability of the drawings. In addition, an accurate 3 D model will be built to reflect the size, shape and structure of the design object, to ensure that the proportion between the components is correct, to provide strong support for subsequent production and manufacturing.
This paper first expounds the development process of robot, the application status at home and abroad, and then puts forward specific requirements for robot design. On this basis, this paper carries out the overall scheme design of the robot system and the specific structure design and calculation of each degree of freedom, and focuses on the design of the expansion mechanism and the fuselage structure. This study aims to provide an efficient and reliable robot solution for the inspection of fire pipelines.
Keywords: walking; fire pipe; inspection robot; structural design; mechanical structure
目 录
摘 要
Abstract
目 录
第1章 绪论
1.1 机器人概述
1.2 机器人的历史、现状
1.3机器人发展趋势
1.4 本课题研究的内容与要求
第2章 机器人总体方案设计
2.1总体设计的思路
2.2 设计方案过程及特点
2.3 总体结构的设计和比较
2.3.1 行走机构的设计
2.3.2 撑开机构的设计
第3章 移动部件的设计和计算
3.1 行走机构的设计和计算
3.1.1 行走机构的驱动电机功率的预算
3.1.2 行走机构结构设计
3.2大小锥齿轮的设计和校核
3.3 轴Ⅰ的设计和校核
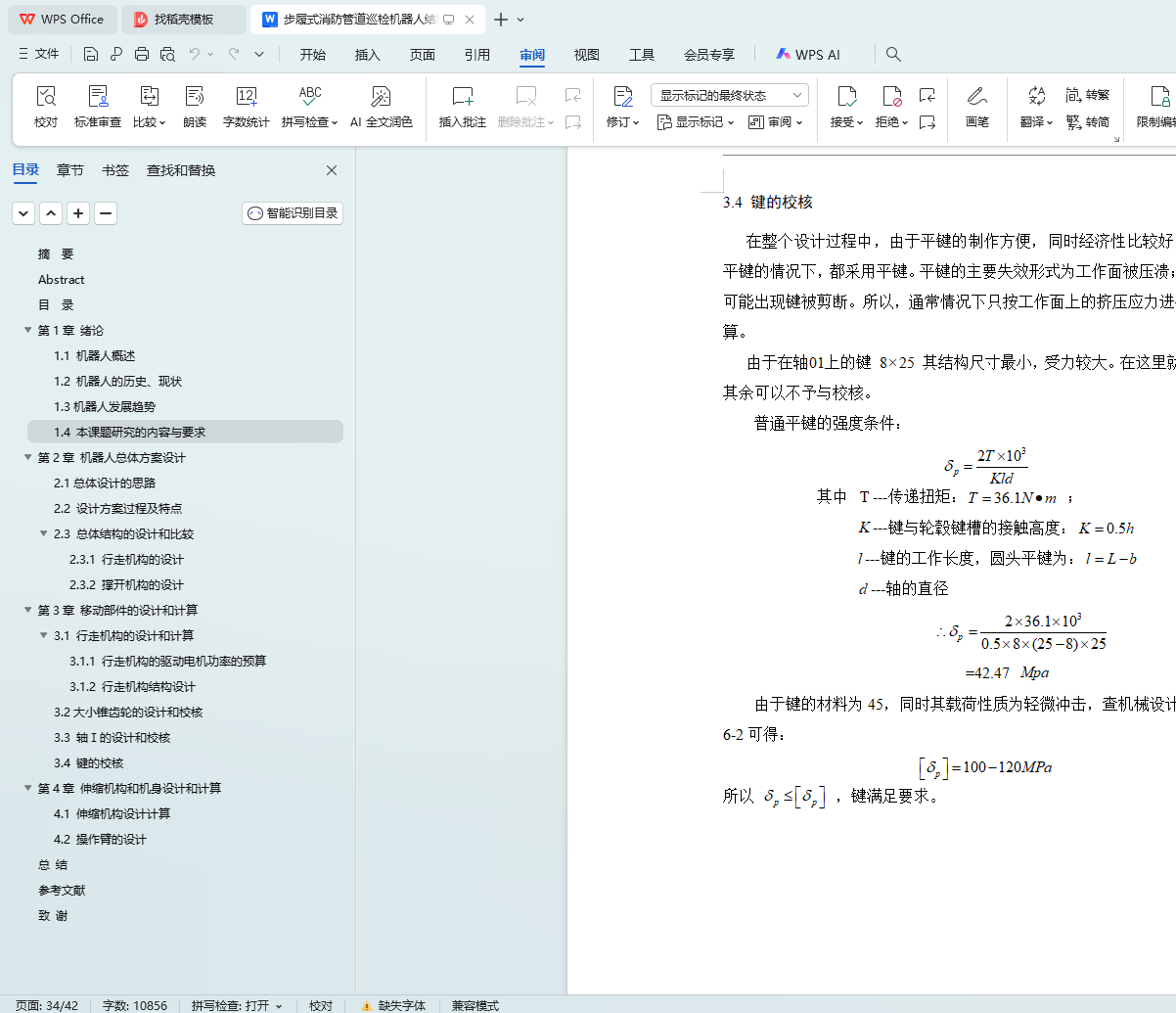
3.4 键的校核
第4章 伸缩机构和机身设计和计算
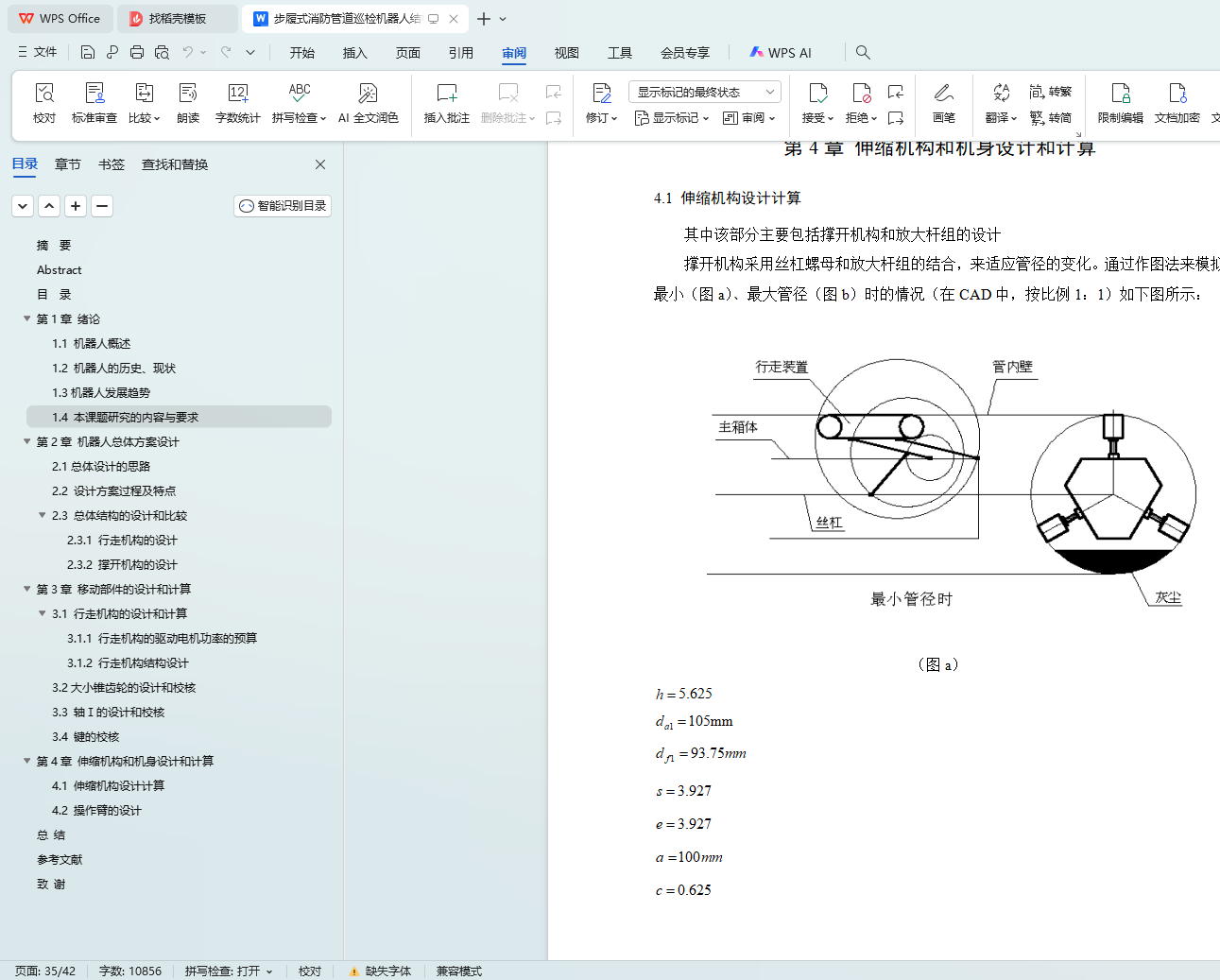
4.1 伸缩机构设计计算
4.2 操作臂的设计
总 结
参考文献
致 谢