摘 要
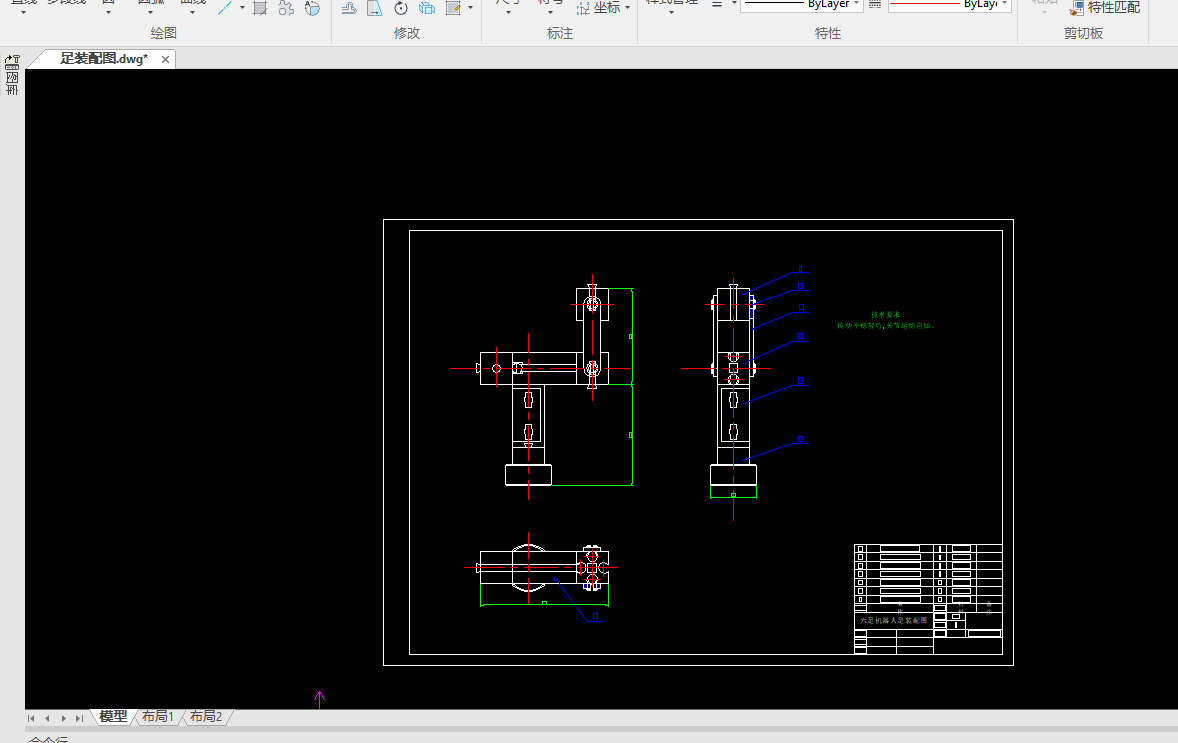
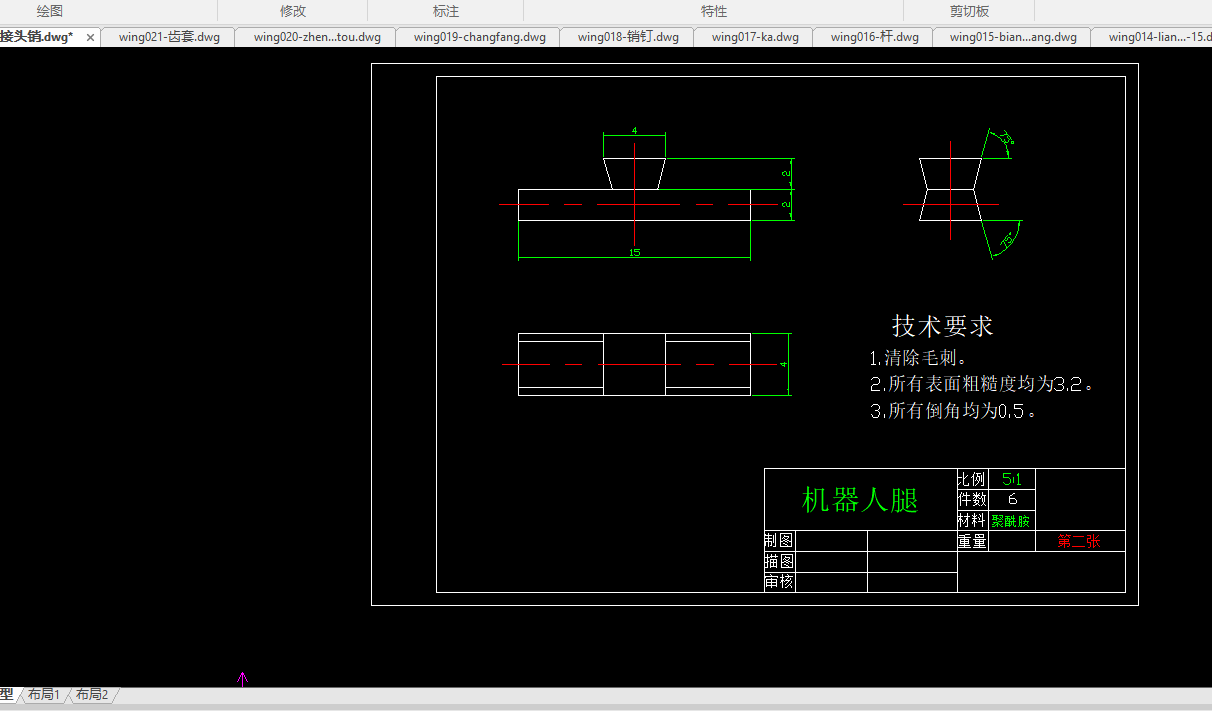
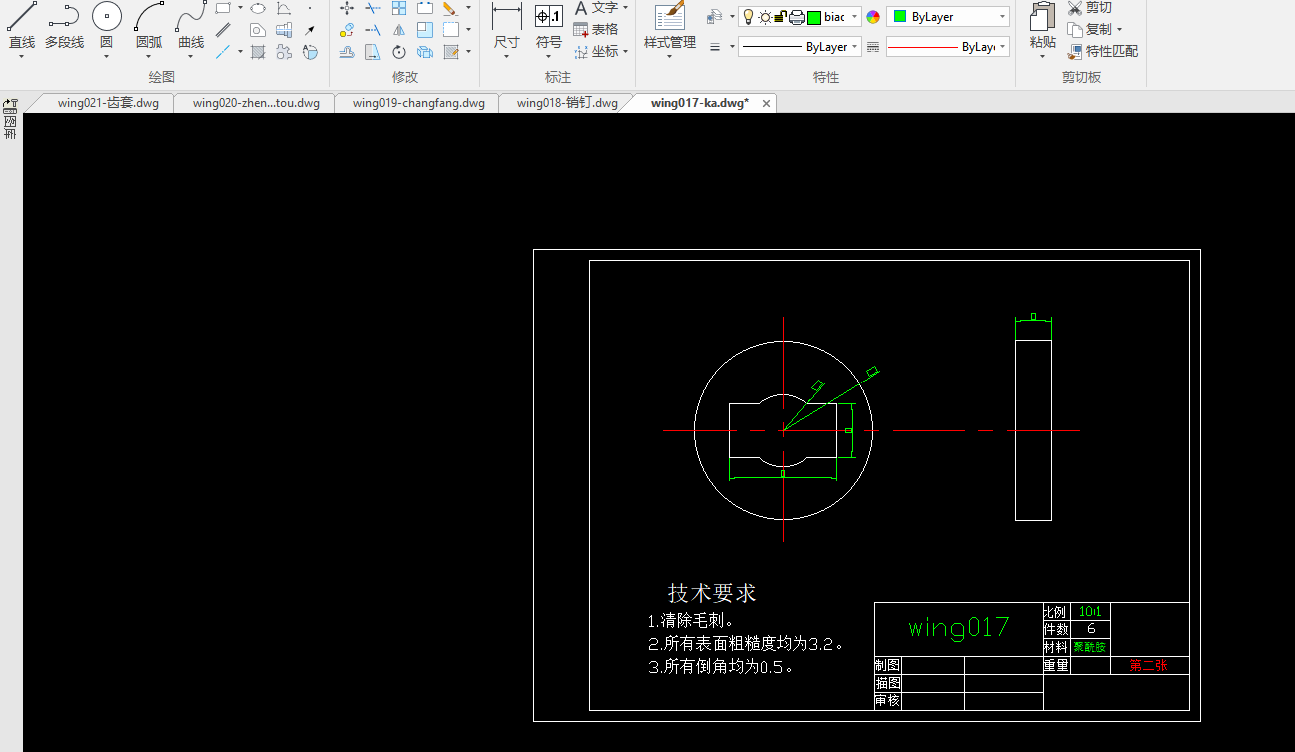
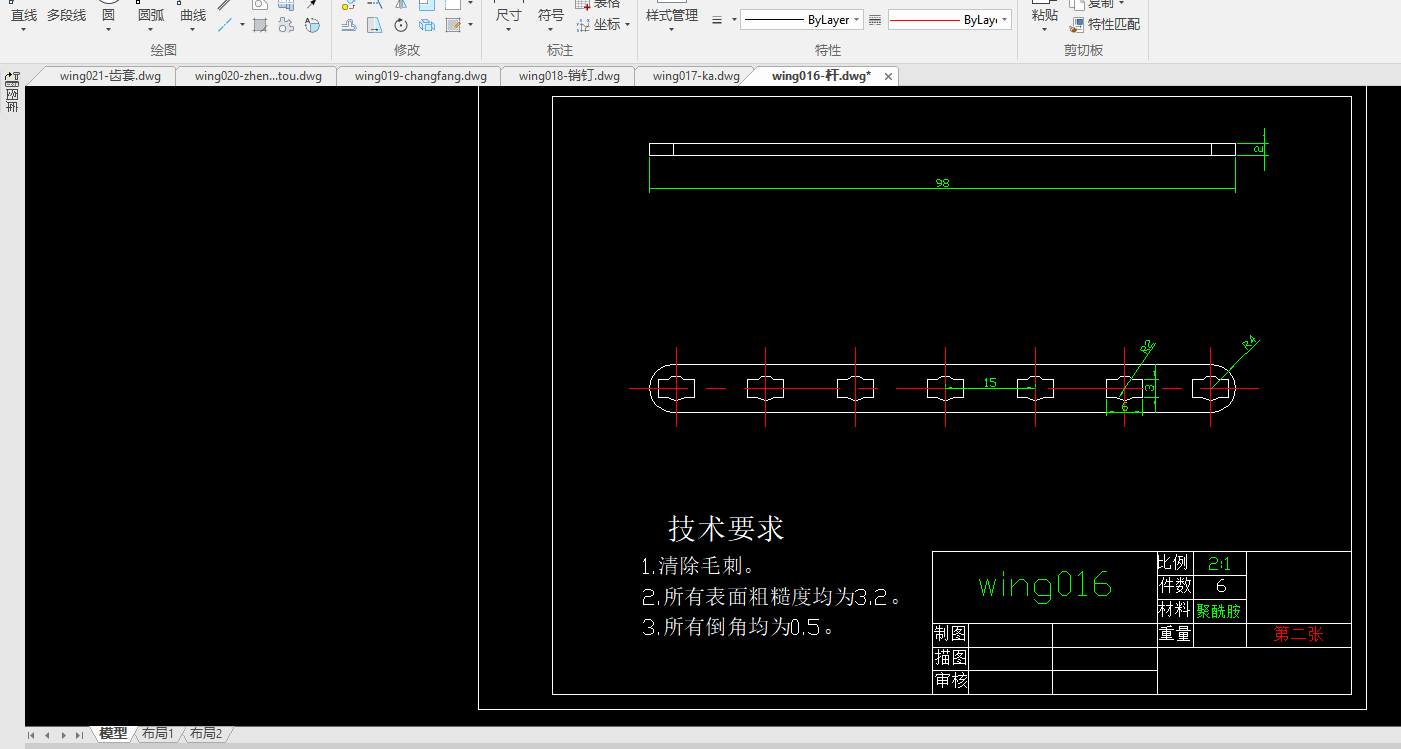
矿业是全球重要的基础产业,矿洞检测是保障矿井安全生产的关键环节。然而,由于矿洞环境的特殊性,如复杂地形、缺氧、毒气、光线不足等问题,人工检测面临诸多挑战,效率低下且安全隐患大。随着机器人技术的快速发展,矿洞检测机器人逐渐成为一种替代人工的有效手段。其中,仿生机器人借鉴自然界生物的运动机理,表现出强大的环境适应性,在复杂环境中的应用前景广阔。本课题旨在设计一种矿洞检测仿生机器人,通过借鉴自然生物的运动特征和感知能力,解决矿洞环境中复杂地形和恶劣条件下的自主检测问题。该仿生机器人将具有较强的适应性、智能化和自主导航能力,可用于矿洞环境中的实时数据采集和安全监控,提高矿洞检测的效率和安全性。
关键词:矿洞检测仿生机器人,结构,控制,编程,运动仿真
ABSTRACT
Mining is an important basic industry in the world, and mine hole testing is the key link to ensure mine safety production. However, due to the particularity of the mine hole environment, such as complex terrain, lack of oxygen shortage, poisonous gas, insufficient light and other problems, manual detection is faced with many challenges, low efficiency and great safety risks. With the rapid development of robot technology, mine hole detection robot has gradually become an effective means to replace artificial. Among them, the biomimetic robot learns from the movement mechanism of natural organisms, and shows strong environmental adaptability, and has broad application prospects in complex environments. This project aims to design a mine hole detection robot to solve the problem of autonomous detection of complex terrain and harsh conditions in the mine environment by drawing on the motion characteristics and sensing ability of natural organisms. The bionic robot will have strong adaptability, intelligence and autonomous navigation capabilities, which can be used for real-time data collection and safety monitoring in the mine environment, and improve the efficiency and safety of mine detection.
Key words: mine hole detection biomimetic robot, structure, control, programming, motion simulation