摘 要
清扫机器人是一种服务机器人,目前已得到使用,我国的很多高校和机构也对其进行了研究设计。清扫机器人的市场必将会受到青睐。
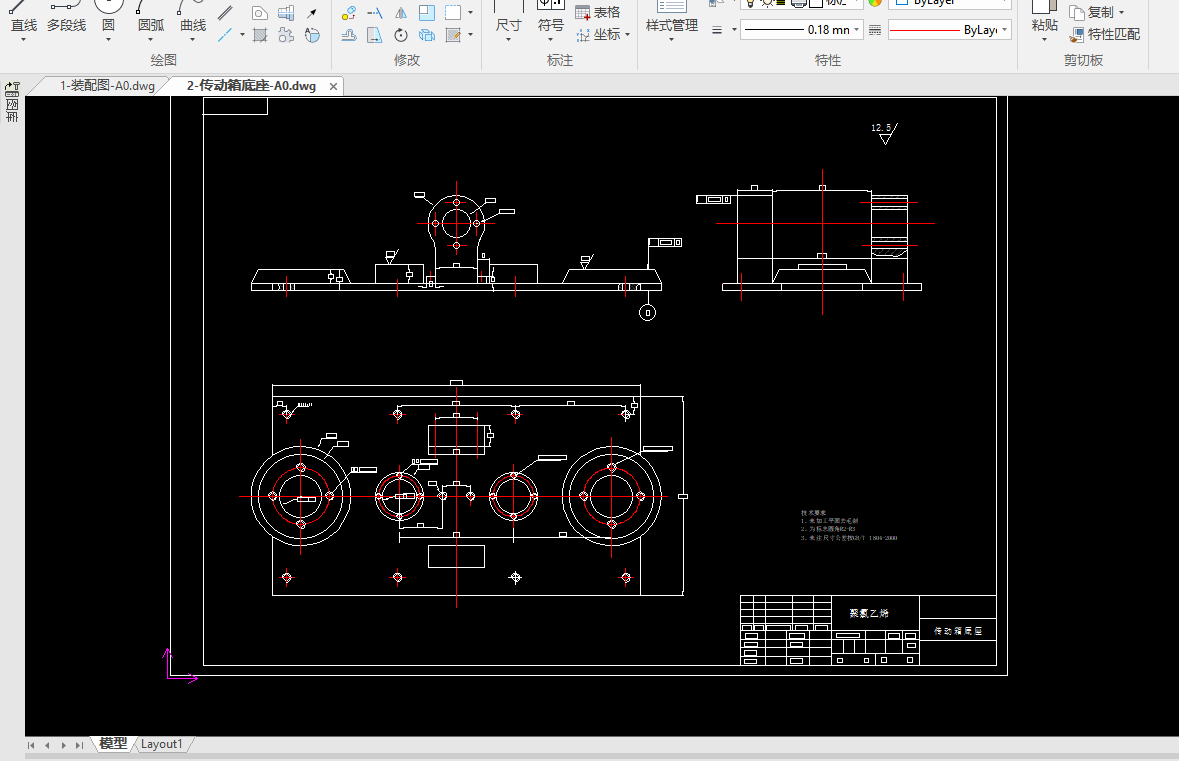
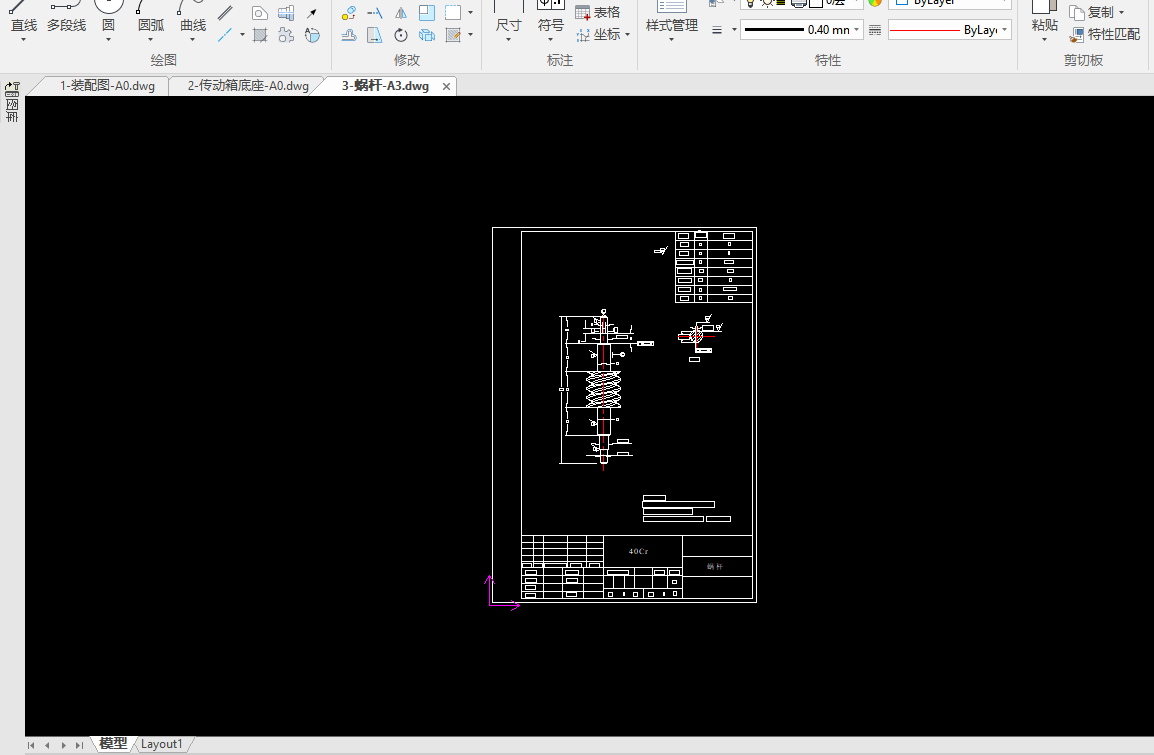
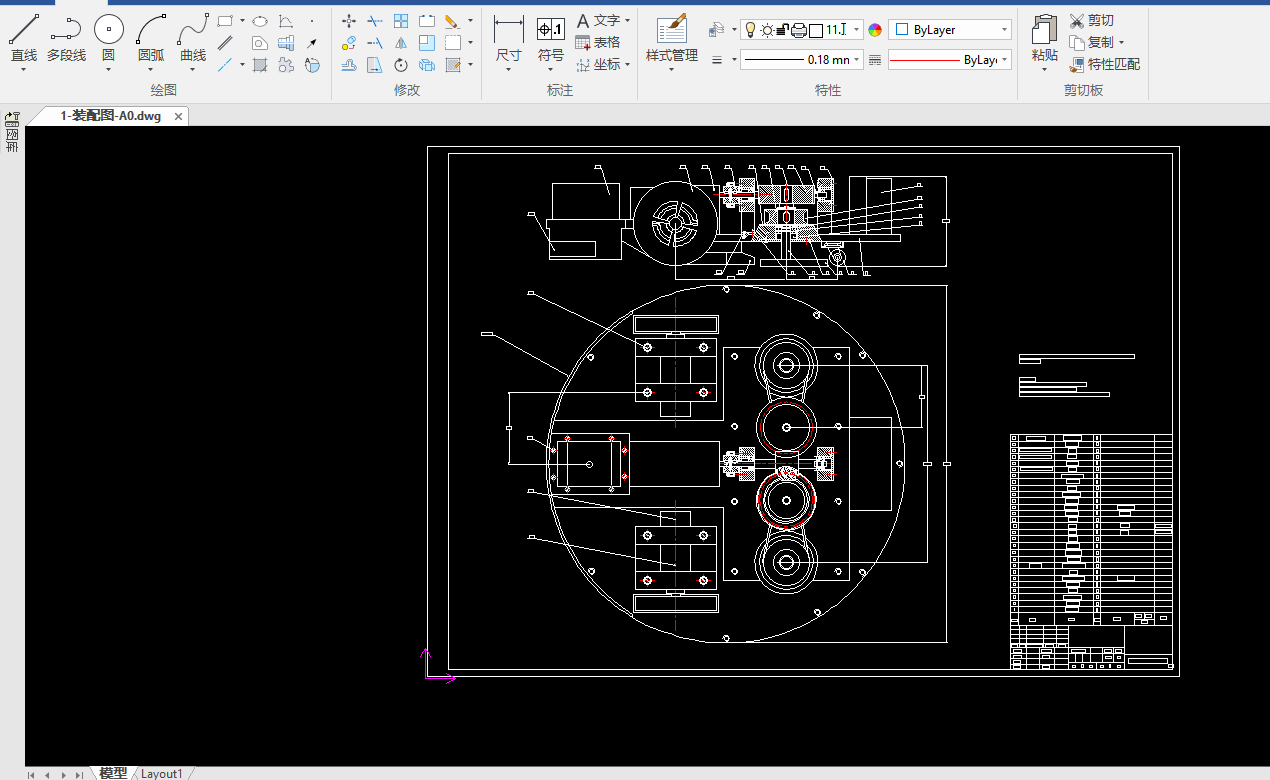
本文设计的自动清扫机器人的主要部件有步进电机、蜗轮蜗杆传动机构、清扫电机、驱动轮和万向轮。步进电机驱动蜗杆,蜗杆两端连接蜗轮,两个蜗轮分别连接皮带轮,皮带轮上的轴连接刷子,从而实现清扫。
本文的主要内容包括:
1)介绍了自动清扫机器人的研究现状,研究的目的意义,设计的重难点。
2)自动清扫机器人的总体方案设计和各部分方案的设计包括外形设计、行走机构设计、清扫机构设计、垃圾收集处理机构设计。介绍了自动清扫机器人的关键技术。
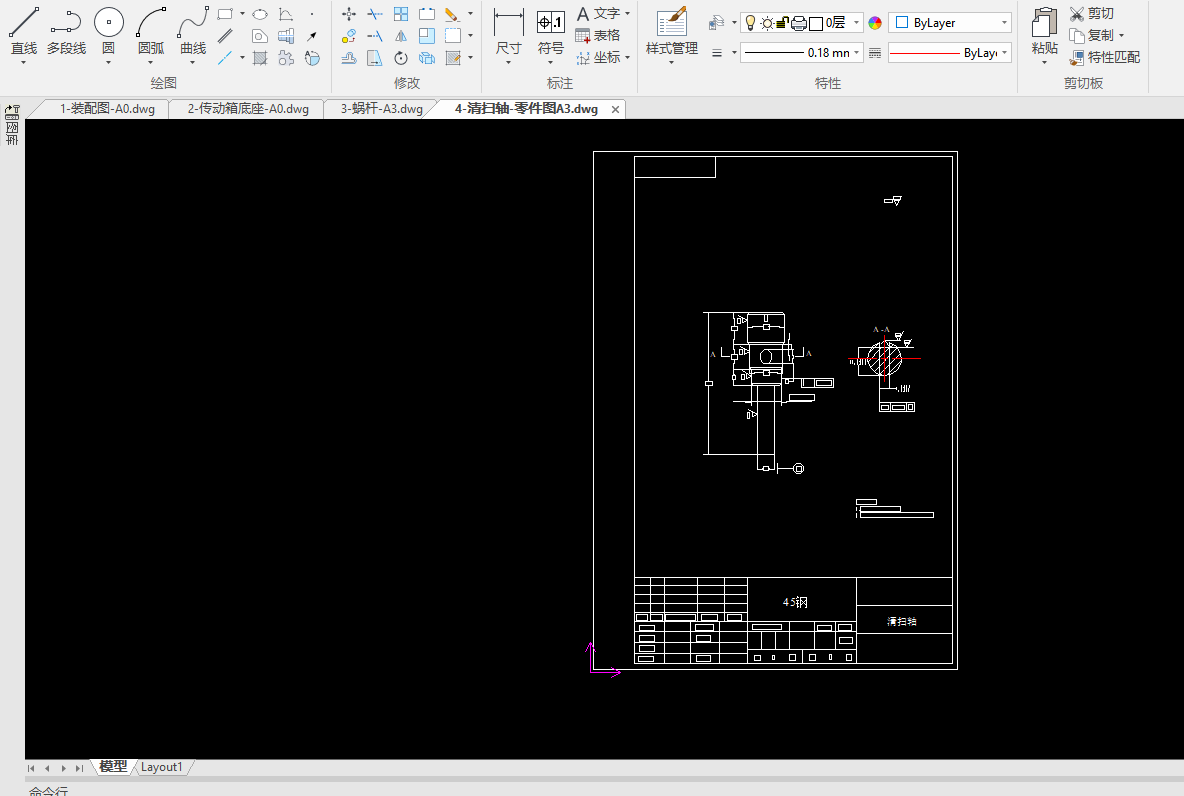
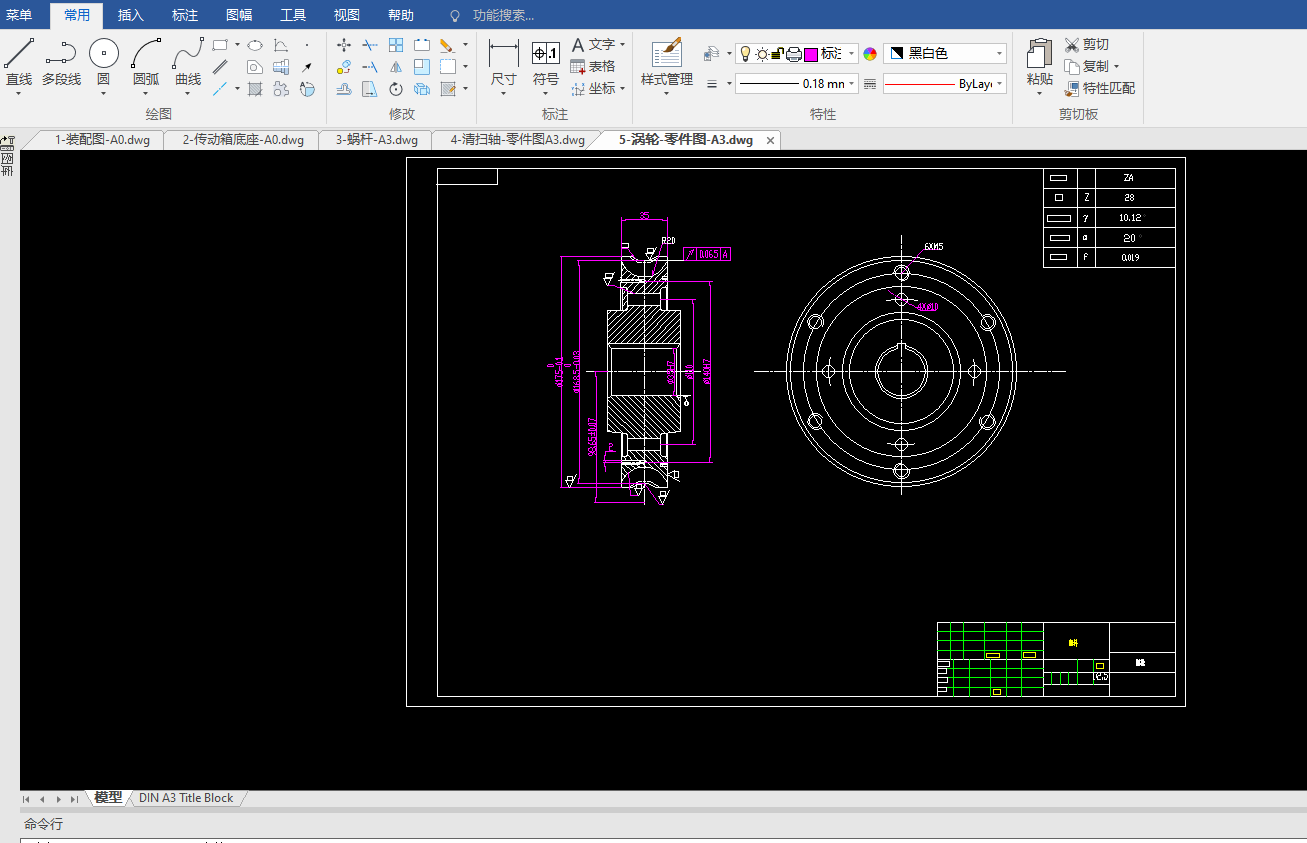
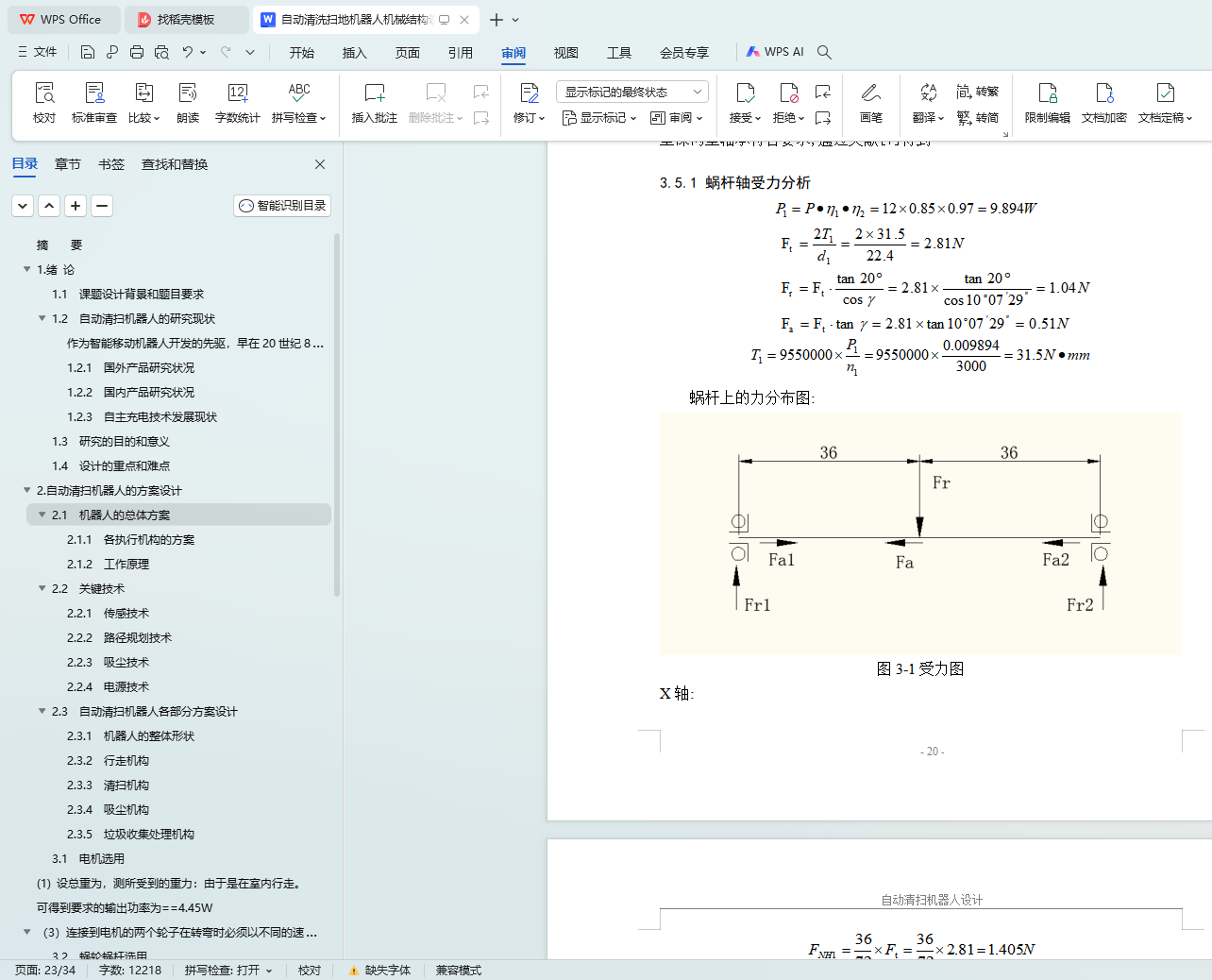
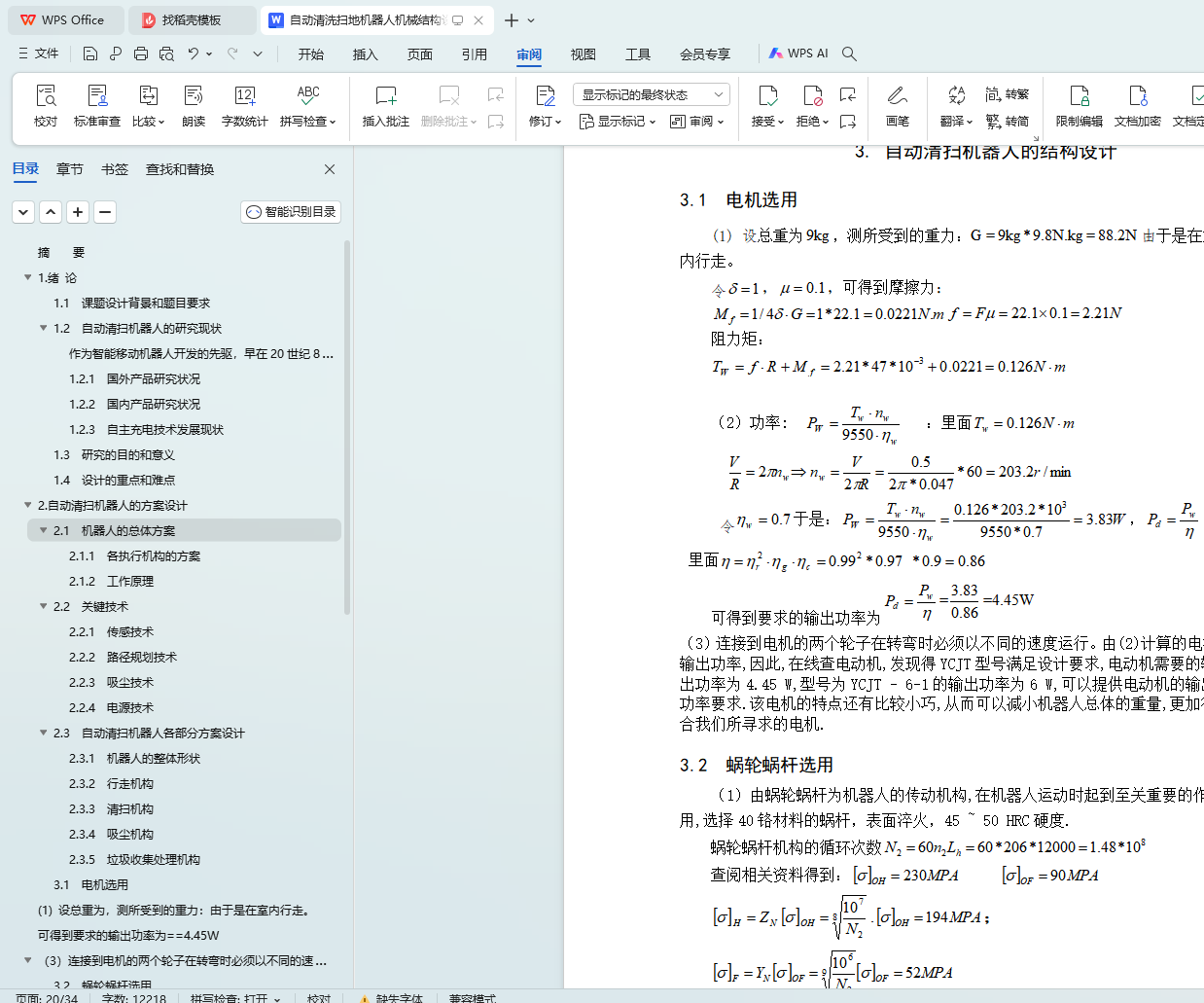
3)自动清扫机器人的结构设计包括选择直流电机、蜗轮蜗杆、清扫机构的电机、电池、清扫轴等,对涡轮轴蜗杆上的轴承进行校核。
4)自动清扫机器人控制部分介绍包括软件设计和硬件设计。
通过参考相关的设计手册,本文设计的自动清洁机器人可以满足设计要求。
关键词:清扫机器人;步进电机;蜗轮蜗杆机构;清洁方式
ABSTRACT
Cleaning robot is a kind of service robot which has been used at present. Many universities and institutions in our country have also studied and designed it. The market for cleaning robots will certainly be popular.
The main parts of the automatic cleaning robot designed in this paper include stepping motor, worm gear transmission mechanism, cleaning motor, driving wheel and universal wheel. The step motor drives the worm, and the worm wheel is connected at both ends. The two worm wheels are connected to the pulley, and the shaft on the pulley is connected with the brush to realize the cleaning.
The main contents of this paper include:
1) introduced the research status of automatic cleaning robot, the purpose of the research, and the key points of design.
2) the overall scheme design of the robot cleaning robot and the design of each part of the plan include the design of the shape, the design of the walking mechanism, the design of the cleaning mechanism, and the design of the garbage collection and processing mechanism. The key technology of automatic cleaning robot is introduced.
3) the structure design of the automatic cleaning robot includes the selection of dc motor, worm and worm gear, the motor of the cleaning mechanism, the battery, the cleaning shaft, etc., to check the bearing on the turboshaft worm shaft.
4) the robot control part introduction includes software design and hardware design.
By referring to the relevant design manual, the automatic cleaning robot designed in this paper can meet the design requirements.
Key words: cleaning robot; Stepping motor; Worm and gear mechanism; Cleaning way.
目 录
摘 要
ABSTRACT Ⅱ
1 绪 论 1
1.1 课题设计背景和题目要求 1
1.2 自动清扫机器人的研究现状 2
1.3 研究的目的和意义 8
1.4 设计的重点和难点 8
2 自动清扫机器人的方案设计 9
2.1 自动清扫机器人的总体方案 9
2.2 自动清扫机器人的关键技术 11
2.3 自动清扫机器人各部分方案设计.......................................................12
3 自动清扫机器人的结构设计 17
3.1 直流电机选择 17
3.2 蜗轮蜗杆的选择 17
3.3 清扫机构电机的选择...........................................................................19
3.4 自动清扫机器人电池的选用...............................................................19
3.5 清扫机构中蜗杆上轴承强度校核...............................................................20
3.6 清扫机构中涡轮轴的校核...................................................................22
3.7 带传动设计...........................................................................................23
3.8 清扫轴的基本参数计算.......................................................................25
4 自动清扫机器人控制部分介绍......................................................................27
4.2 自动清扫机器人的硬件设计.................................................................27
4.2 自动清扫机器人的软件设计.................................................................27
5 结 论 29
参 考 文 献 30
致 谢 42