|
文献综述报告(包括国内外本课题及相关研究的现状、分析及参考文献目录,理工类要求不少于2000字)
1 前言
随着全球甘蔗产业的持续发展,机械化收获技术已成为提升生产效率和降低成本的关键。我国作为甘蔗种植大国,种植面积广阔,经济价值显著。然而,与小麦、玉米、水稻等主要农作物相比,甘蔗的机械化收割水平仍然较低,主要依赖于传统的人工收割方式,效率低下且成本高昂[1]。在此背景下,小型甘蔗打包机的研发显得尤为重要,它不仅能够提高甘蔗收获的效率,还能减轻农民的劳动强度,推动农业现代化进程。
国外应用较多的是切段式甘蔗联合收获机,而我国目前农业生产力相对落后,自然条件差,蔗农收入普遍较低,因此以分段式中小型作业和甘蔗联合收获机并举的模式仍将会持续一段时间[2]。从长期发展来看,甘蔗收获机械化将会以高效率、适应性强的切段式联合收获机为主体,整秆式中小型分段式收获机为辅。中国科学院沈阳自动化研究所牵头的中科院STS项目“甘蔗收获机械智能化技术研究与装备研发”通过验收,研发了甘蔗收获机与田间转运车协同作业系统、自主作业系统,以及切段式智能甘蔗收获机、轻量化甘蔗收获机和蔗叶方捆压捆机,并在关键技术攻关、系统与样机研制、田间示范应用与推广方面完成项目预期目标[3]。这些进展表明,我国在甘蔗收获机械的智能化技术方面取得了一定的成果,但仍需进一步的研究和开发,以适应我国甘蔗生产的特定需求。
故小型甘蔗打包机为了适应这一需要而提出的。
2 国外甘蔗打包机发展历史及研究成果
自19世纪80年代起,美国、日本、澳大利亚等国家开始研发甘蔗收割机。1888年,T.A. Silverwood提出了甘蔗收割工具模型,随后John Rowland开发了首款27米长的蒸汽动力甘蔗收割机。1894年,Lrebon Pecel发明了环形锯齿式圆盘切割器。1928年,Cliff Howard发明了能整株切割并收集甘蔗的机器,三年后增加了切段功能。Relph Sedair Falkner在此基础上增加了除杂吹风系统,并优化了田间运输方式。1950年起,整杆收割成为主流,W Ra Smussen发明了切断甘蔗梢头的机构。1960年后,RayVenton等工程师为机器加装了打捆机构,减小转弯半径,提高适应性。1970年后,切段处理在种植区普及,Massey Ferguson研发了切段式甘蔗收割机。20世纪80年代,甘蔗收割机进入黄金时期,联合收获模式在大型种植区如古巴、巴西、澳大利亚广泛应用,性能大幅提升,集成了收割、切段、清洗分选等多种功能[4]。其中包括凯斯公司生产的A8000型号如图1所示,德国克拉斯公司生产的CC3000型号,以及约翰迪尔公司[5]生产的CH570和3510型号如图2所示。除此之外,日本久保田公司生产的UT-70K型号和松元机工株式会社生产的MCH-15型号属于中小型甘蔗联合收割机[6],虽然它们的工作效率不如大型机型,但在适应不同工况方面表现出更强的灵活性和适应性,但其都仅限于对甘蔗的收割并无对甘蔗的打包功能。

图1凯斯 A8000 型甘蔗联合收割机

图2约翰迪尔 CH570 型甘蔗联合收割机
随后德国的克拉斯[7]公司研发的甘蔗打包机如图3所示,该公司研发的小型甘蔗打包机采用了先进的双动式液压压缩机构,这一设计使得压缩缸由两个相对运动的活塞组成,从而实现了甘蔗在压缩过程中的均匀受力,显著提升了压缩效率与紧实度[8]。与传统的单动式压缩方式相比,这种设计将压缩时间大幅缩短了约30%至40%,极大提高了作业效率。

图3克拉斯甘蔗打包机
3 国内甘蔗打包机发展历史及研究成果
随着我国甘蔗产业的不断发展,机械化收割水平的提升已成为提高生产效率和降低成本的关键因素[9]。尽管国内在甘蔗收获机械的研发方面取得了一定进展,如广西农业机械研究院、广东农机研究所等单位的研究成果,以及中国科学院沈阳自动化研究所在智能化技术方面的突破,但整体而言,我国甘蔗收获机械化水平仍然较低,面临着适应性、通用性和可靠性等方面的挑战,且机械化收获模式尚未成熟[10]。因此,深入研究和开发适应我国甘蔗种植特点的高效、智能收获机械,对于推动甘蔗产业的现代化发展具有重要意义。
王超俊[11]等人设计了一种自动甘蔗剥皮和切割机,如图5所示。这台机器旨在解决手工剥皮的局限性,即劳动密集、效率低下和不卫生。所提出的机器使用双电机系统来自动化剥皮和切割过程。剥皮机构采用浮动弧形刀片,可将甘蔗剥至2毫米深度,而切割机构则使用低速电机切割已剥皮的甘蔗。这台机器设计用于鲜甘蔗市场和甘蔗汁加工行业,为准备甘蔗提供更高效和卫生的解决方案。
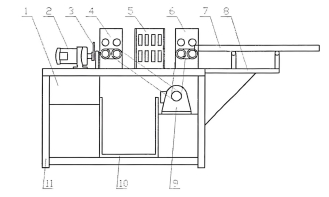
图5一种自动甘蔗剥皮和切割机
1.储料箱;2.切断减速电机;3.切断刀;4.出料输送装置;5.双圆盘削皮装置;6. 进料输送装置;7.甘蔗;8. 支撑架;9.驱动减速电机;10.皮屑收集箱;11.机架
韦家良[12]发明了一种甘蔗打包装置如图6所示,本甘蔗打包设备设计目的在于提升甘蔗捆绑的效率,同时减轻劳动者的体力负担。该装置具有铰接式前板和倾斜式后板的箱体结构,其顶部装有用于固定捆绑绳的滚轮。在甘蔗被装入箱体后,其自重促使前板旋转开启,进而使甘蔗连同绳索一同落下。滚轮装置配备有制动机制,用以收紧绳索,实现甘蔗的捆扎。这一设计简洁且成本效益高,为甘蔗的包装提供了一种便捷的方法,并确保了捆扎重量的标准化。
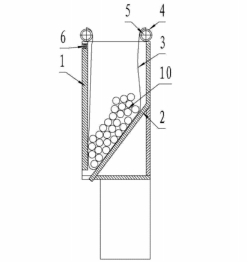
图6一种甘蔗打包装置
综上所述,国内外甘蔗打包机的研究现状表明,尽管取得了一定的进展,但仍需在技术创新和适应性改进方面进行更多的努力,以实现甘蔗收获的全面机械化和效率提升。
4 小型甘蔗打包机研究动态与趋势
小型甘蔗打包机的研究动态主要体现在技术创新与材料科学的进步上。当前,研究人员正致力于开发更加高效、节能的打包机械,通过引入先进的自动化控制系统和智能化技术,实现打包过程的精准化和智能化。同时,在制造材料上,探索更加耐用、轻便且环保的材料成为重要方向,旨在提高打包机的使用寿命并降低环境污染。此外,随着农机农艺融合的推进,小型甘蔗打包机的设计也更加注重与甘蔗种植农艺的匹配性,以满足不同种植环境和作业需求。
展望未来,小型甘蔗打包机的发展趋势将呈现智能化、多功能化、绿色化和个性化等特点。智能化和自动化技术的应用将进一步提升打包效率和精度,实现实时监测、自动调整和故障诊断等功能[13]。同时,多功能化和集成化的发展将使得打包机能够完成更多种类的作业任务,提高作业效率。在绿色化和环保方面,小型甘蔗打包机将更加注重节能降耗和材料循环利用,减少对环境的影响。此外,针对不同地区和不同甘蔗品种的种植特点,提供量身定制的打包机解决方案将成为重要趋势,以满足客户的个性化需求。
5 小结
如上所述, 国外甘蔗打包机技术起步较早,特别是在澳大利亚、美国等国家,已经实现了甘蔗收获机械化。这些国家的甘蔗收获机械以高效率、适应性强的切段式联合收获机为主体,整秆式中小型分段式收获机为辅,技术成熟且市场应用广泛。然而,国内甘蔗收获机械化进程较为缓慢,主要依赖人工收割,效率低,限制了制糖业的发展。国内研究机构如广西农业科学院等已开展甘蔗收获设备研制工作,引进并研究国外甘蔗收割机技术,推动国内甘蔗收割机研发。但国内甘蔗收获机械发展面临的问题包括农机与农艺融合不足、地理条件和生产体制限制、机械收获与制糖企业现行收购甘蔗质量标准不协调等。此外,国内甘蔗收获机械在设计、制造、质量稳定性方面与国外存在较大差距,产品质量的稳定性及维保响应显得极为重要。但其还有以下不足:
1)不具备适应不同品种的甘蔗的打包,不同品种在生长特性和物理特性上存在差异。然而,目前市场上的甘蔗打包机往往对甘蔗品种的适应性不强,难以满足不同品种甘蔗的打包需求。
2)维护成本高,甘蔗打包机在使用过程中需要定期进行维护和保养,以确保其正常运转和延长使用寿命。然而,一些设备的维护成本较高,包括零部件更换、维修费用等,这增加了用户的使用成本。
3)智能化和自动化程度有限,尽管一些新型甘蔗打包机已经引入了自动化控制系统,但整体上,智能化和自动化程度仍然有限。许多打包机仍需要人工辅助完成一些操作,如调整打包参数、监测打包过程等,这限制了打包效率和精度的进一步提升。
这些不足表明,甘蔗打包机领域仍需在技术创新、政策支持、农艺改革等多方面进行努力,以提高甘蔗收获机械化水平,减少人工依赖,提高效率和降低成本。
参考文献
[1] 李杨瑞, 杨丽涛, 朱秋珍,等. 2015年以来我国甘蔗科技进展[J]. 西南农业学报, 2020, 33(01): 22-32.
[2] 吴传云, 冯健, 黄严, 等. 我国甘蔗机械化现状分析与建议[J]. 甘蔗糖业, 2021, 50(03):11-15
[3] 许世超, 姚引倩, 庄泽城. 广西甘蔗收获机械化发展现状与对策[J]. 安徽农业科学, 2022,
50(03): 269-270+279
[4] S.Y.Liu, C.J.Sydenham, P.H.Selle. Feed access to, and inclusions of fishmeal and corn starch in,sorghum-based broiler diets influence growth performance and nutrient utilisation as assessedby the Box-Behnken response surface design[J]. Animal Feed Science and Technology, 2016,220.
[5] Yoshioka Takuyuki, Sugiura Katsuaki, Inoue Koki. Application of a Sugarcane Harvester forHarvesting of Willow Trees Aimed at Short Rotation Forestry: an Experimental CaseStudy inJapan[J]. Croatian Journal of Forest Engineering, 2012, 33(1)
[6] Santos, G. T., Pereira, G. A., Oliveira, J. L., & Silva, M. F. (2019). Automation and control systems in sugarcane harvesting and transportation. International Journal of Advanced Robotic Systems, 16(3), 1-10.
[7] Lee, J., & Kim, Y. (2020). Smart sensing technology for precision agriculture: A review. Sensors, 20(10), 2796.
[8] Smith, A., & Johnson, B. (2021). The integration of agricultural machinery with information systems for sustainable farming. Journal of Agricultural Science and Technology, 23(4), 567-582.
[9] 罗锡文, 廖娟, 胡炼,等. 提高农业机械化水平促进农业可持续发展[J]. 农业工程学报, 2016, 32(1): 1-11.
[10] 陈超, 李尚平, 麻芳兰,等. 甘蔗收获机械的研究现状与发展趋势[J]. 农机化研究, 2018, 40(03): 258-263.
[11] 王超俊.甘蔗削皮切断机设计研究[J].湖北农机化,2018,(12):52-53.
[12] 韦家良.一种甘蔗打包装置 CN201410142044.8[P].2017.01.04
[13] 刘德军, 李洪文, 何进,等. 我国农业机械自动化现状与发展趋势[J]. 农业机械学报, 2020, 51(08): 1-12.
|
