摘 要
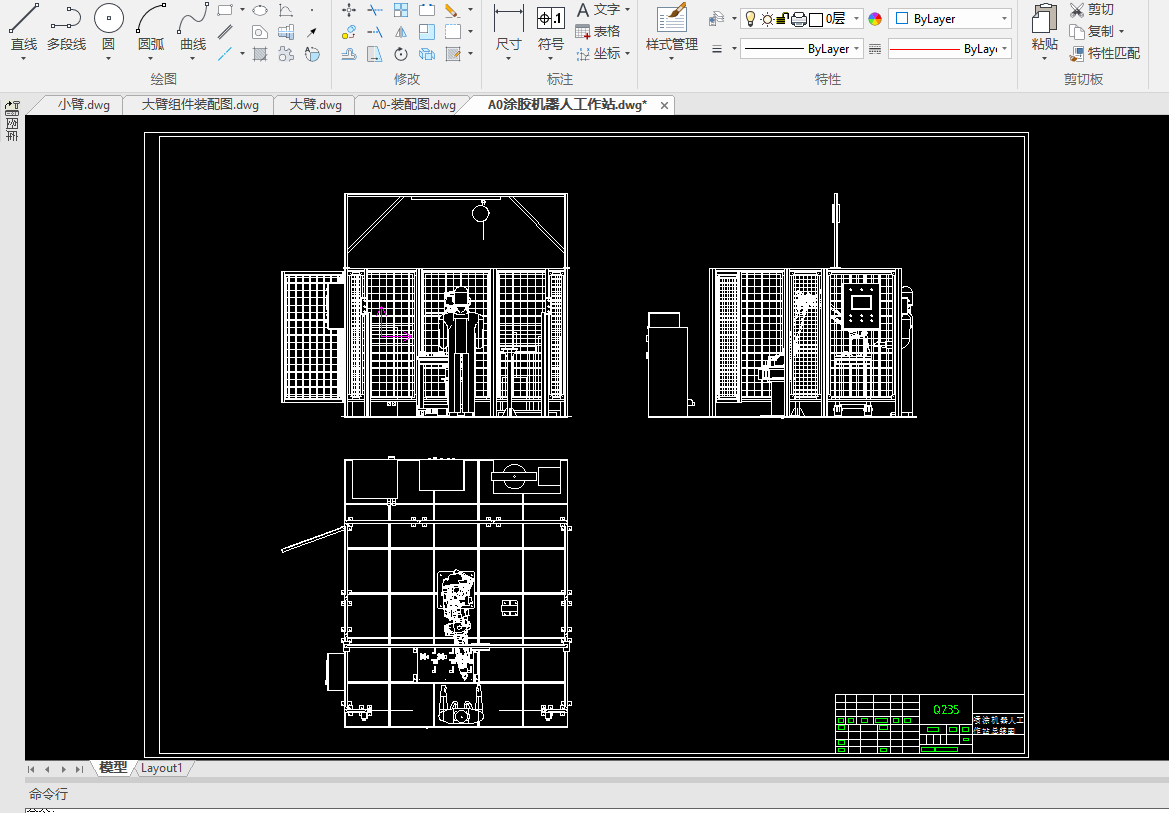
随着工业自动化的不断进步,喷涂机器人在自动化生产线中扮演着至关重要的角色,它们在设计和应用方面的重要性正日益增加。本文以3R斜交手腕喷涂机器人为研究对象,针对其在工业涂装过程中的高效性和灵活性需求,进行了总体及腰部结构设计。首先,基于机器人的技术参数,本文提出了一种新型的6自由度关节型机器人构型设计方案,该方案采用中空结构的手腕设计,保证了喷涂过程中涂料的顺畅流通。其次,对机器人的驱动系统和传动结构进行了详细设计,确保了机器人的精确控制和高稳定性。接着,通过绘制机器人传动系统图和总体布局及尺寸联系图,明确了机器人的机械结构和空间布局。此外,本文还完成了关键部件的装配图和主要零件图的设计,并提出了相应的控制方案。最后,结合设计过程,撰写了设计计算说明书,为机器人的制造和调试提供了理论依据。本研究的成果不仅提升了喷涂机器人的工作效率,也为喷涂机器人的设计提供了新的思路。
关键词:喷涂机器人;3R斜交手腕;总体设计;腰部结构;自动化涂装
Abstract
With the continuous progress of industrial automation, the design and application of spraying robot. In this paper, the 3R oblique wrist spraying robot designs the overall and waist structure for its high efficiency and flexibility in the industrial coating process. First of all, based on the technical parameters of the robot, this paper proposes a new 6 degree of freedom joint robot configuration design scheme, which adopts the wrist design of the hollow structure design, to ensure the smooth circulation of paint in the spraying process. Secondly, the drive system and drive structure of the robot are designed in detail to ensure the precise control and high stability of the robot. Then, by drawing the robot transmission system diagram and the overall layout and size connection diagram, the mechanical structure and spatial layout of the robot are defined. In addition, this paper completes the assembly drawing of key parts and main parts, and proposed the corresponding control scheme. Finally, combined with the design process, the design calculation manual is written, which provides a theoretical basis for the manufacturing and debugging of the robot. The results of this study not only improve the working efficiency of spraying robot, but also provide new ideas for the design of spraying robot.
Key words: spraying robot; 3R oblique wrist; overall design; waist structure; automatic coating
目 录
摘 要
Abstract
1 绪论
1.1 选题背景及意义
1.1.1 选题背景
1.1.2 选题意义
1.2 国内外研究及发展趋势
1.2.1 国内研究现状
1.2.2 国外研究现状
1.2.3 发展趋势
1.3 本文研究主要内容
2 机器人机构总体方案设计
2.1 3R斜交手腕喷涂机器人的基本技术参数设定
2.1.1 自由度的选定
2.1.2 坐标形式的抉择
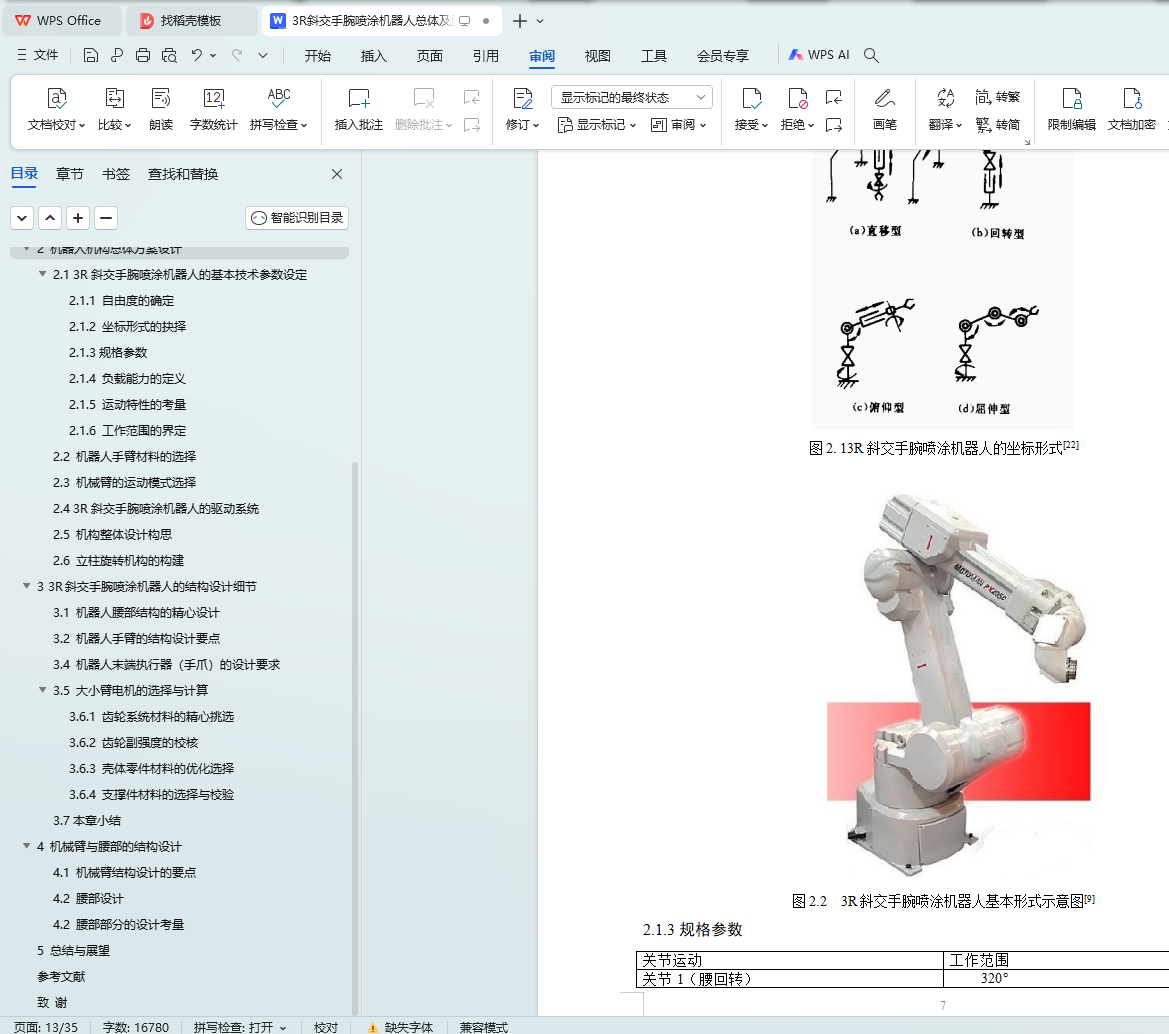
2.1.3规格参数
2.1.4 负载能力的定义
2.1.5 运动特性的考量
2.1.6 工作范围的界定
2.2 机器人手臂材料的精选
2.3 机械臂运动方式的确定
2.4 3R斜交手腕喷涂机器人的驱动系统选型
2.5 机构整体设计构思
2.6 立柱旋转机构的构建
3 3R斜交手腕喷涂机器人的结构设计细节
3.1 机器人腰部结构的精心设计
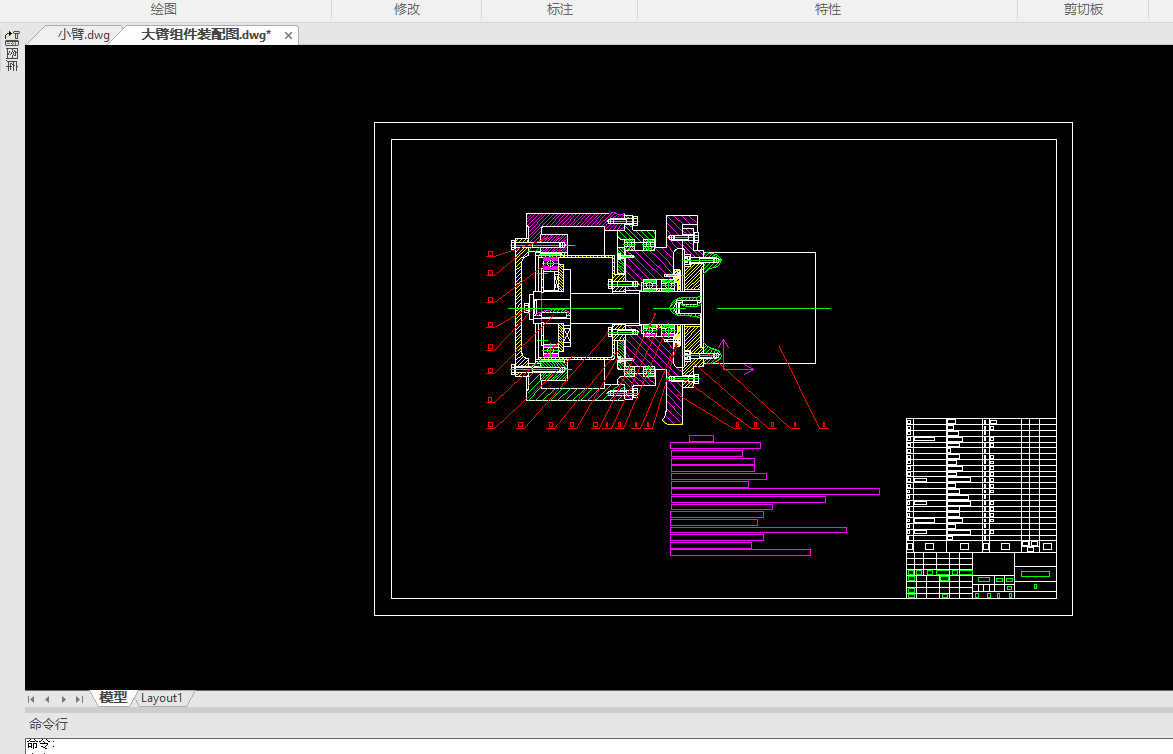
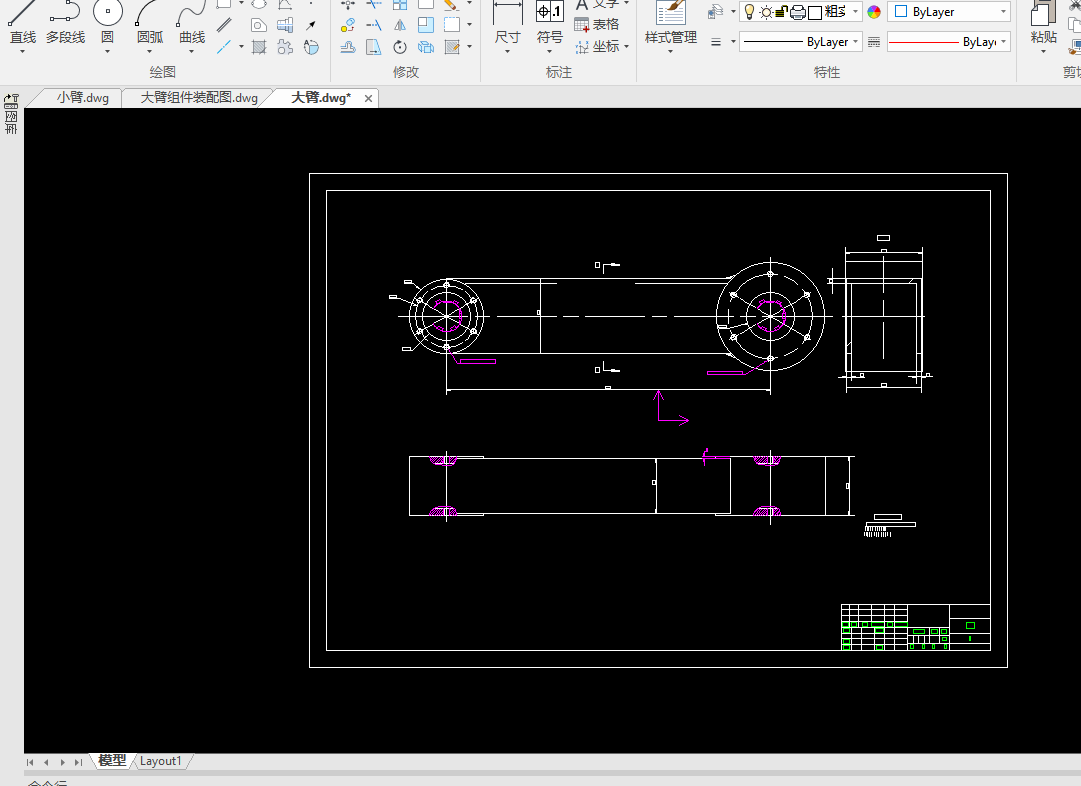
3.2 机器人手臂的结构设计要点
3.3 机器人腕部的结构设计考量
3.4 机器人末端执行器(手爪)的设计要求
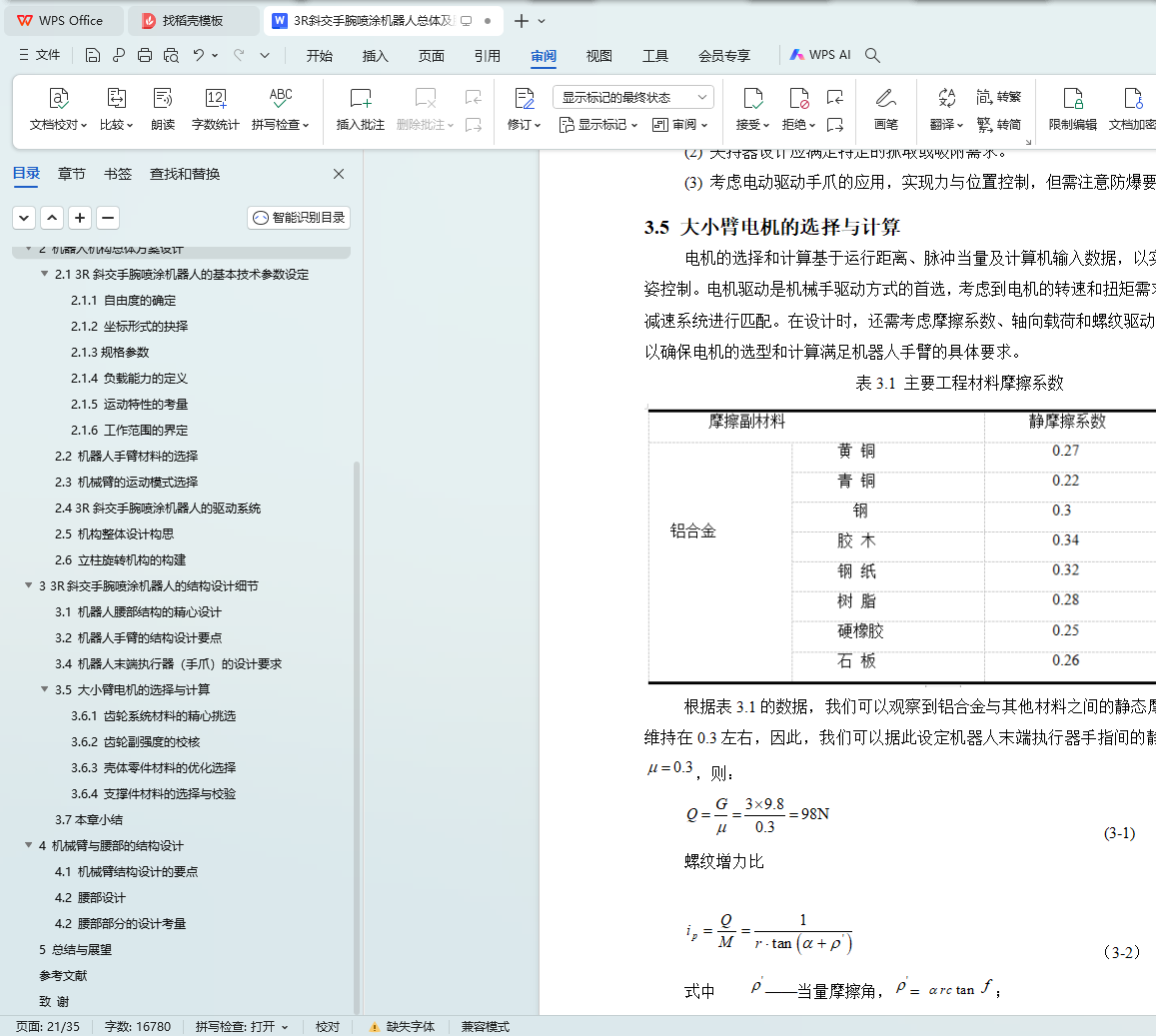
3.5 大小臂电机的选择与计算
3.6 关键零部件材料的甄选及强度验证
3.6.1 齿轮系统材料的精选
3.6.2 齿轮副强度的核算
3.6.3 壳体零件材料的优化选择
3.6.4 支撑件材料的选择与校验
3.7本章小结
4 机械臂与腰部的结构设计
4.1 机械臂结构设计的要点
4.2 腰部设计
4.2 腰部部分的设计考量
5 总结与展望
参考文献
致 谢