摘 要
本选题源于对智能机器人技术的深入探索与兴趣,旨在通过设计基于AT89C51单片机的巡线机器人,实现跟踪、巡线、避障和红外遥控等功能。选题结合了现代传感器技术、控制理论与实际应用需求,旨在推动智能机器人技术的创新与发展。
本文设计了一种基于AT89C51单片机的智能巡线机器人控制系统,实现了跟踪、巡线、避障和红外遥控等多项基本功能。系统通过集成红外探测器、超声波探测器等传感器,有效检测信号和障碍物,并采用L298模块作为驱动电路,确保巡线机器人的稳定运动。在设计过程中,本文深入研究了物体避障、黑线红线巡线、红外遥控等关键技术,并采用了创新性的技术方法。从单片机的最小系统到电机控制电路、红外线对管的自动寻迹和超声波避障,本文完成了各模块的设计,并通过调试检测,确保各模块能输出正确的信号。最终,通过单片机的控制逻辑,实现了巡线机器人的各项功能。本研究不仅为智能机器人的设计与应用提供了新的思路,也为相关领域的研究提供了有价值的参考。
关键词:AT89C51单片机;智能巡线机器人;红外探测器;超声波探测器;避障;巡线
Abstract
This topic is based on the in-depth exploration and interest of intelligent robot technology, aiming to realize the functions of tracking, patrolling the line, obstacle avoidance and infrared remote control. The topic combines modern sensor technology, control theory and practical application needs, aiming to promote the innovation and development of intelligent robot technology.
This paper designs an intelligent line patrol robot control system based on AT89C51 single-chip microcontroller, which realizes many basic functions such as tracking, line patrol, obstacle avoidance and infrared remote control. By integrating infrared detector, ultrasonic detector and other sensors, the system can effectively detect signals and obstacles, and use L298 module as the driving circuit to ensure the stable movement of the car. In the design process, this paper deeply studies the key technologies such as object obstacle avoidance, black line and red line patrol and infrared remote control, and adopts innovative technical methods. From the minimum system of single-chip microcomputer to the motor control circuit, infrared tube automatic trace and ultrasonic obstacle avoidance, this paper has completed the design of each module, and through debugging and detection, to ensure that each module can output the correct signal. Finally, through the control logic of the microcontroller, the various functions of the intelligent car are realized. This study not only provides new ideas for the design and application of intelligent robots, but also provides valuable references for research in related fields.
Key words:AT89C51 single chip microcomputer; intelligent patrol robot; infrared detector; ultrasonic detector; obstacle avoidance; patrol
目 录
摘 要
Abstract
第1章 绪论
1.1 选题背景及意义
1.1.1 选题背景
1.1.2 选题意义
1.2 国内外研究现状及发展趋势
1.2.1 国内研究现状
1.2.2 国外研究现状
1.2.3 发展趋势
1.3 本课题研究的主要内容
第2章 系统总体方案设计
2.1 设计要求
2.2 方案选择
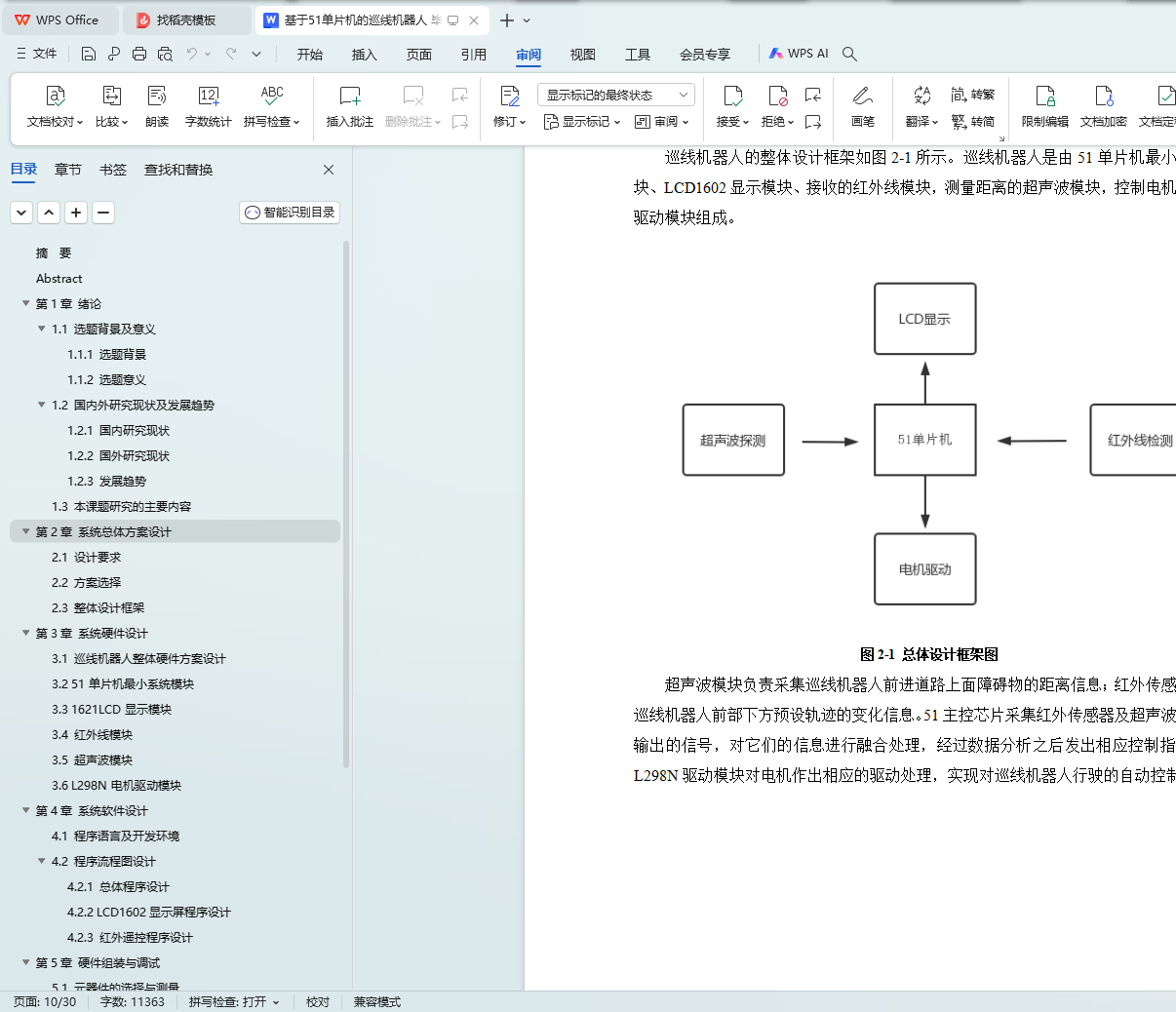
2.3 整体设计框架
第3章 系统硬件设计
3.1 巡线机器人整体硬件方案设计
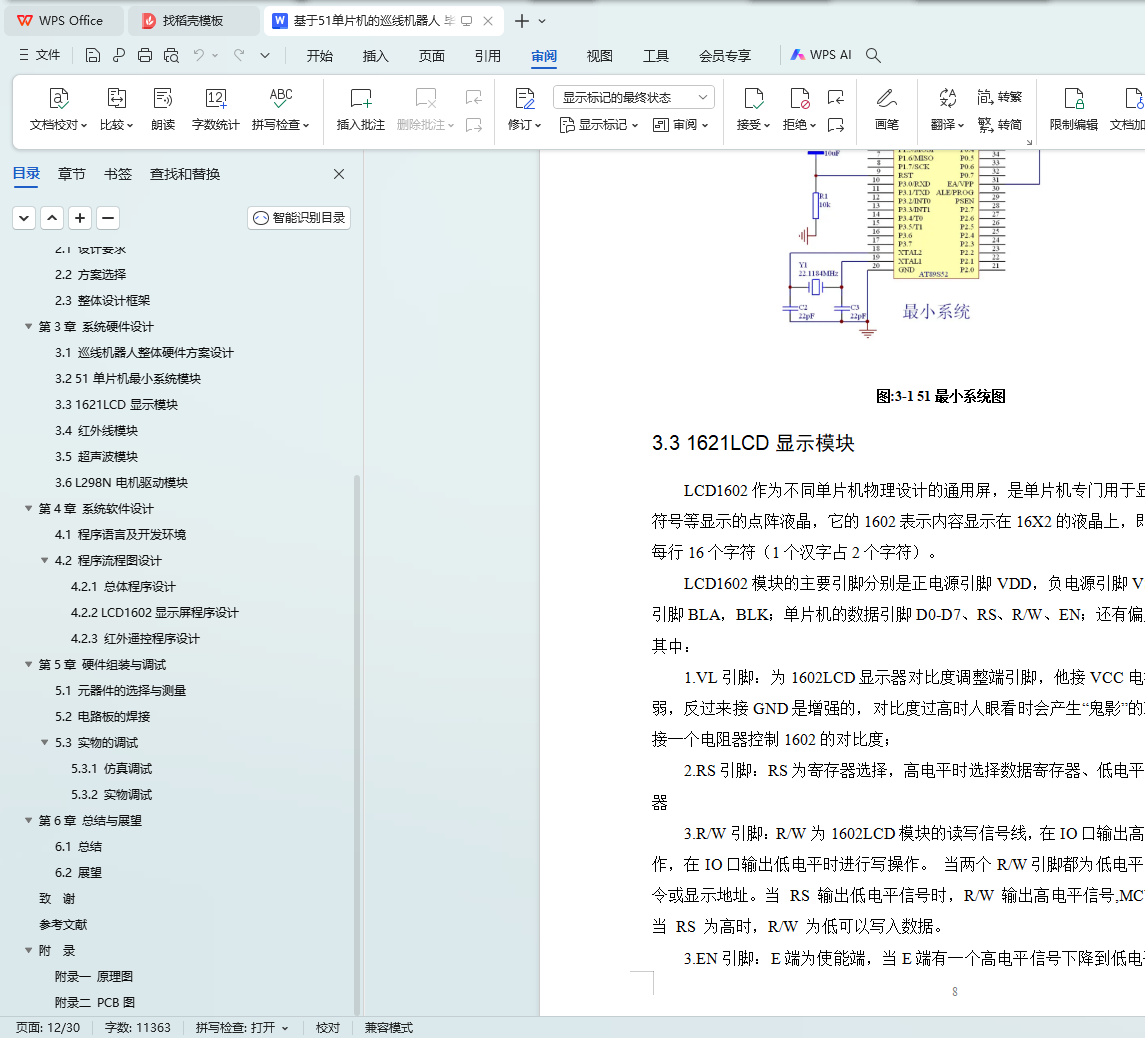
3.2 51单片机最小系统模块
3.3 1621LCD显示模块
3.4 红外线模块
3.5 超声波模块
3.6 L298N电机驱动模块
第4章 系统软件设计
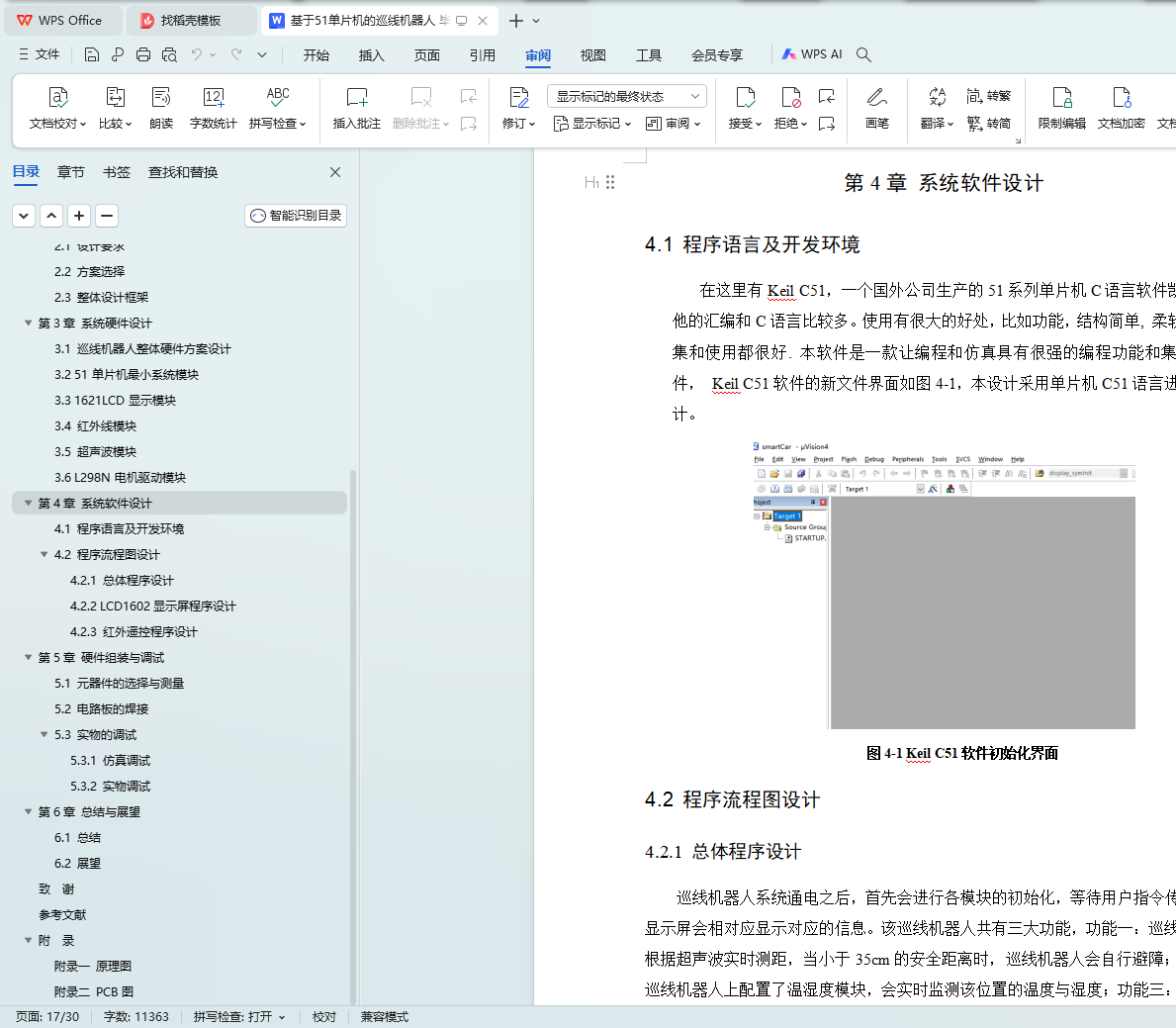
4.1 程序语言及开发环境
4.2 程序流程图设计
4.2.1 总体程序设计
4.2.2 LCD1602显示屏程序设计
4.2.3 红外遥控程序设计
第5章 硬件组装与调试
5.1 元器件的选择与测量
5.2 电路板的焊接
5.3 实物的调试
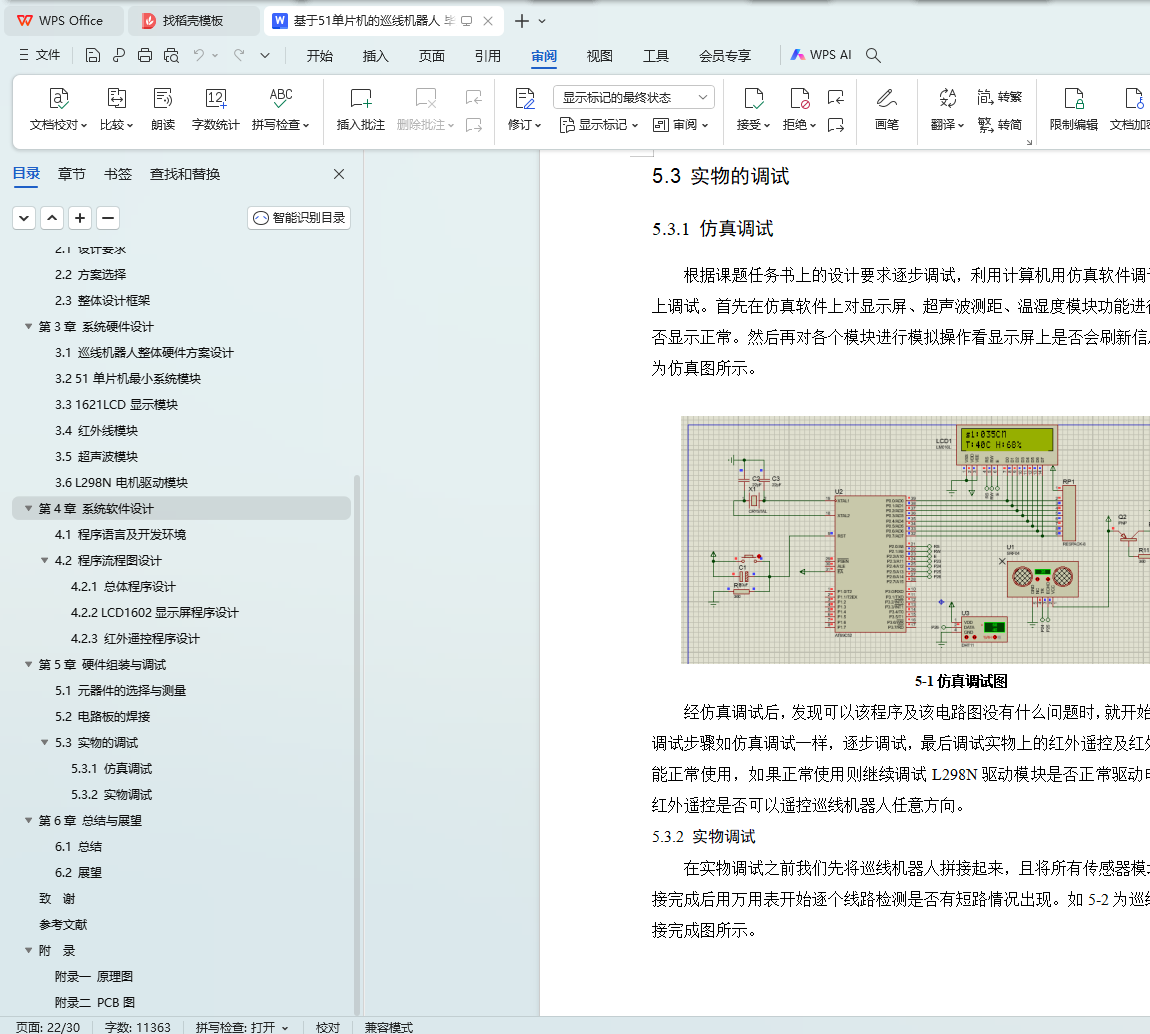
5.3.1 仿真调试
5.3.2 实物调试
第6章 总结与展望
6.1 总结
6.2 展望
致 谢
参考文献
附 录
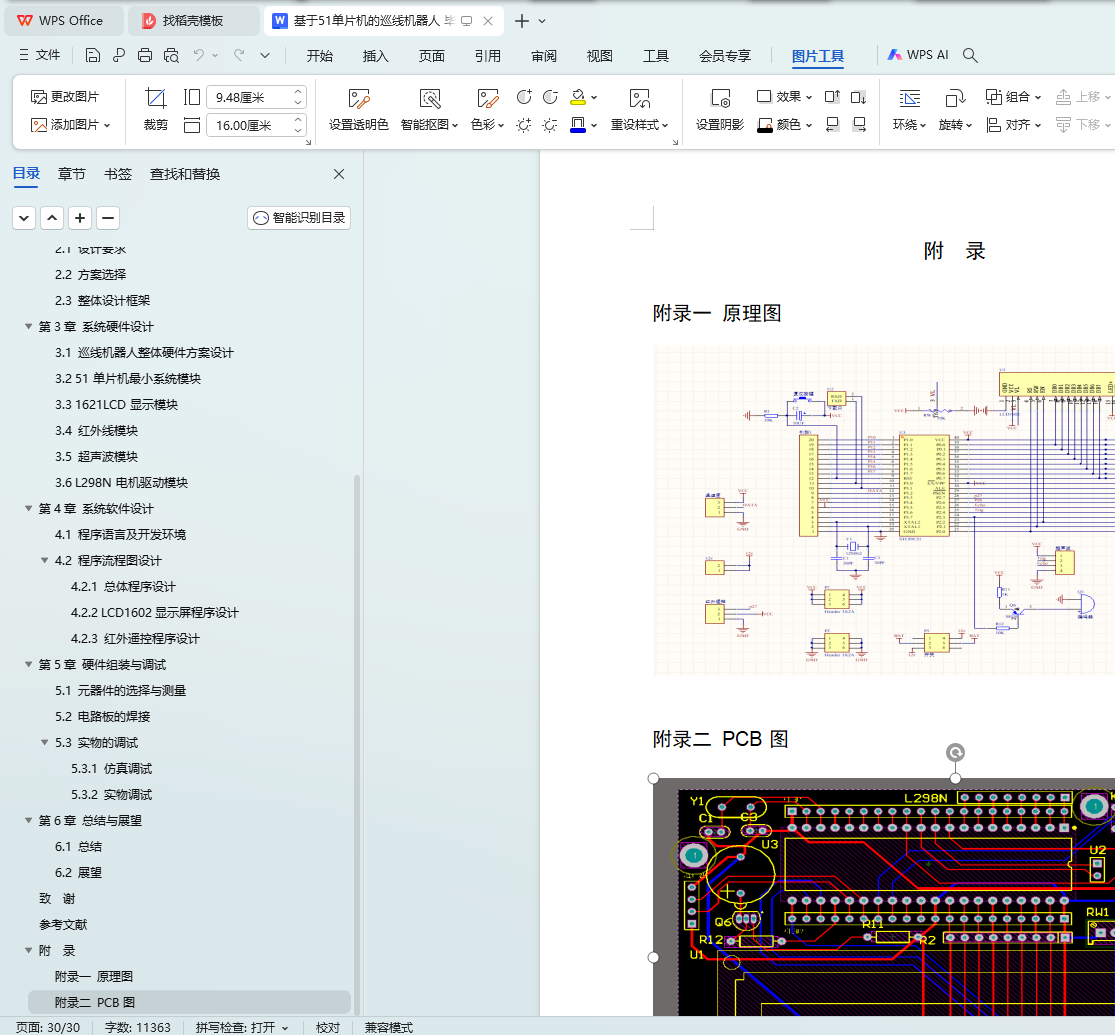
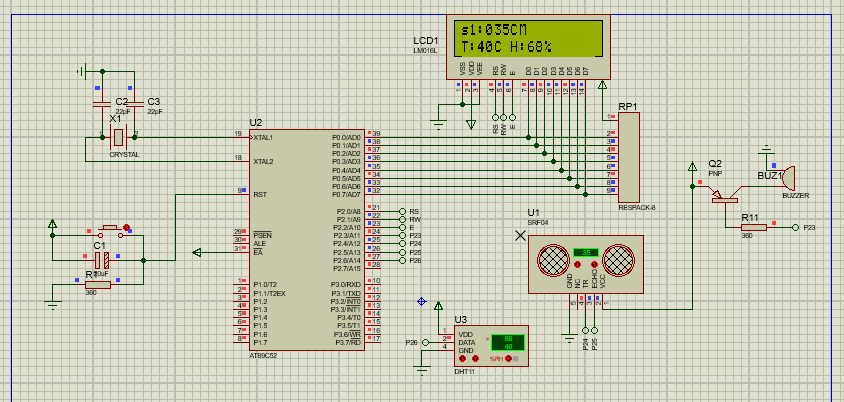
附录一 原理图
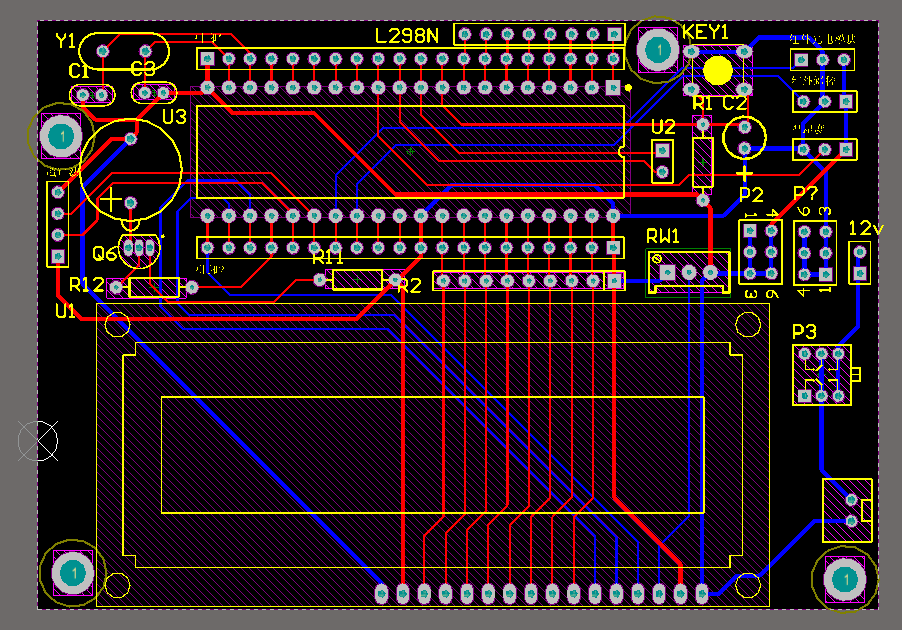
附录二 PCB图