摘 要
随着工业的发展和劳动力的紧缺,机器人市场规模不断的扩大,协作机器人凭借其安全性强的特点渐渐融入了生产线,而协作机械臂的关节模块构成精细而复杂,其核心组件包括减速器、电动机、制动器、编码器、驱动器、传感器以及一系列关键部件。在这些关键部件中,减速器起到了至关重要的作用,不仅提升了机械臂关节的精度和扭矩输出,还保证了机械臂的高效运行。其中,谐波减速器、RV 减速器和行星减速器是减速器选型中比较突出的选择。谐波减速器具有小型体积、承载能力强、安装简便、较高传动比和传动平稳的优点,成为轻载荷机器人领域的首要选择。其独特的传动机制使得它在有限的空间内实现了高效的扭矩传递。RV 减速器则结合了新型齿轮箱与传统摆线齿轮箱的优点,打造出结构紧凑、精度稳定的传动机构。其显著特点是拥有结构刚性好、疲劳强度高和较长的使用寿命,适用于各种高速、重负载的应用场合。行星减速器因其具有多功能性而著称,它能够有效降低电机的转速并同时增加输出扭矩,满足了机器人在不同工作场景下的需求。在动力源方面,伺服电动机因其卓越的性能而广泛应用于协作机械臂中。特别是无框力矩电机,具有高扭矩密度和紧凑的结构设计,为机械臂提供了灵活而强大的动力支持。
此外,为确保机械臂在断电时能够安全制动,电磁式制动器成为了不可或缺的关键部件。因其体积小、结构紧凑,操作简单且安装方便,支持远程操作,为机器人的安全运行提供了坚实保障。协作机械臂关节编码器采用的是双编码器,主要进行速度与位置的反馈,协作机械臂执行系统的主要部件为伺服驱动器。
关键词:协作机械臂;无框力矩电机;减速器;
VII
目录
毕业论文(设计)任务书
摘 要
1 绪论
1.1 研究背景及意义
1.2 概述
1.3 国内外发展状况
1.4 协作机器人发展趋势
1.4.1 协作机器人发展方向
1.4.2 决断力和感知方面的提升
1.4.3 安全性能的持续提升
1.4.4 多领域应用的适应性
2 总体方案设计
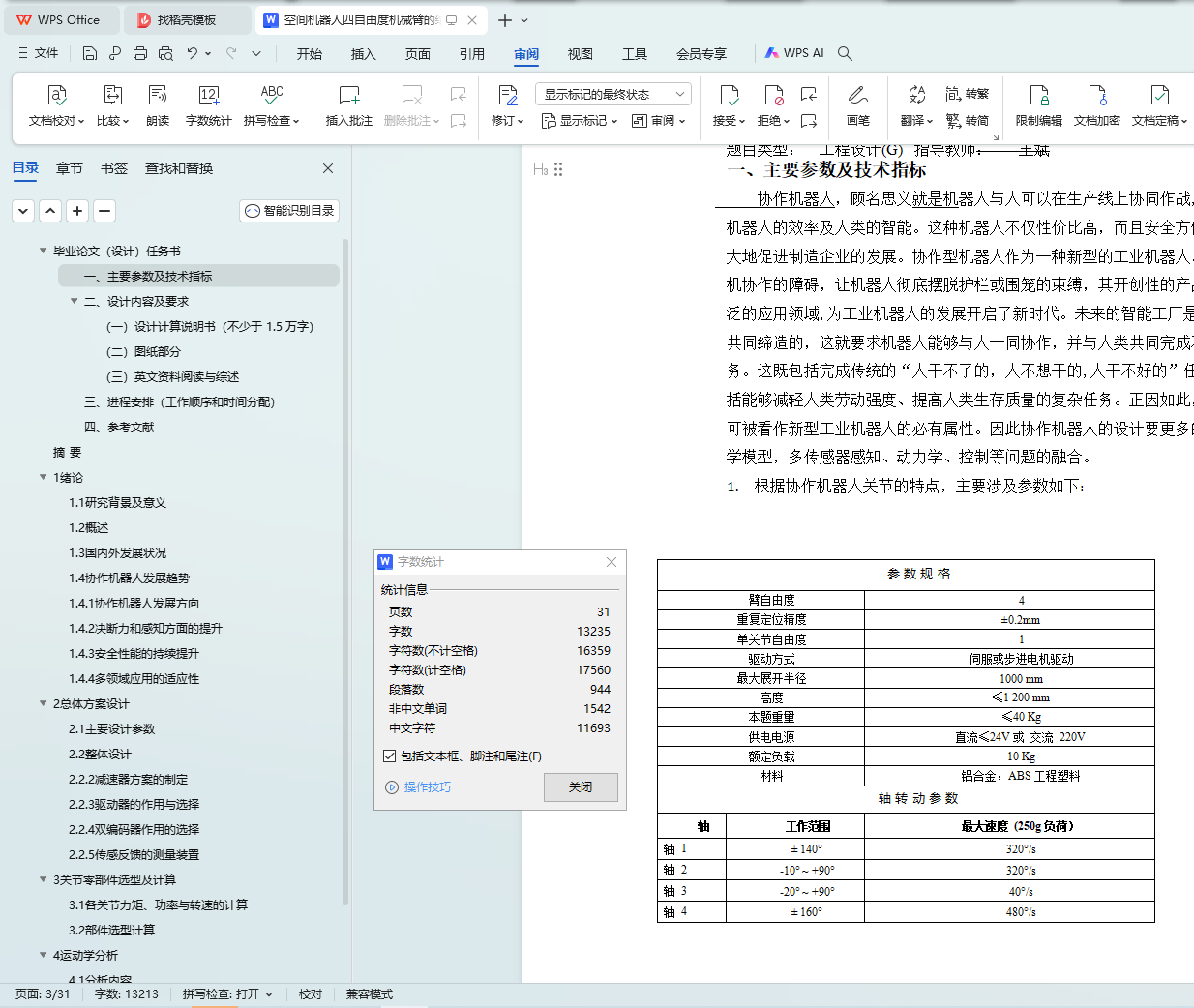
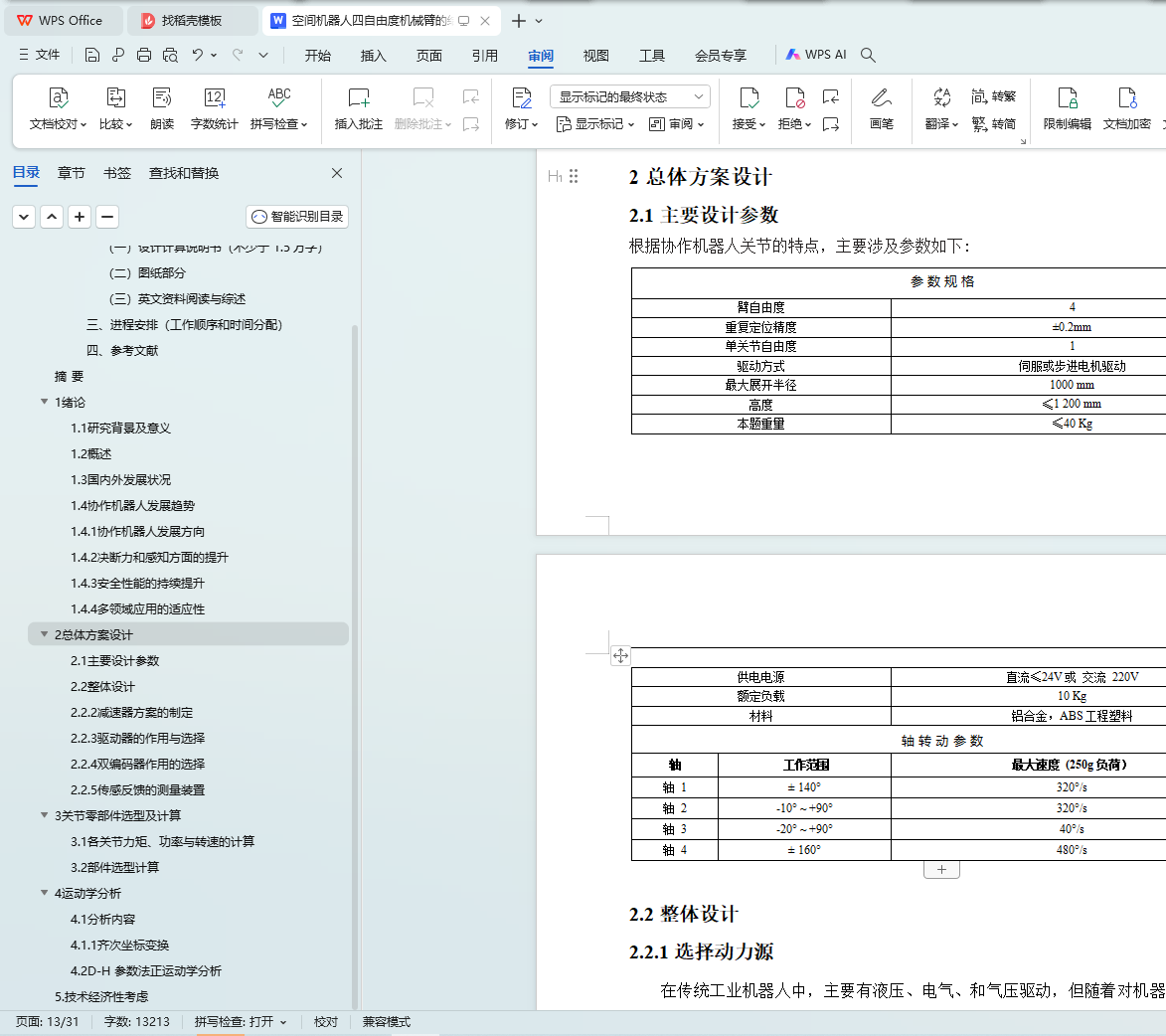
2.1 主要设计参数
2.2 整体设计
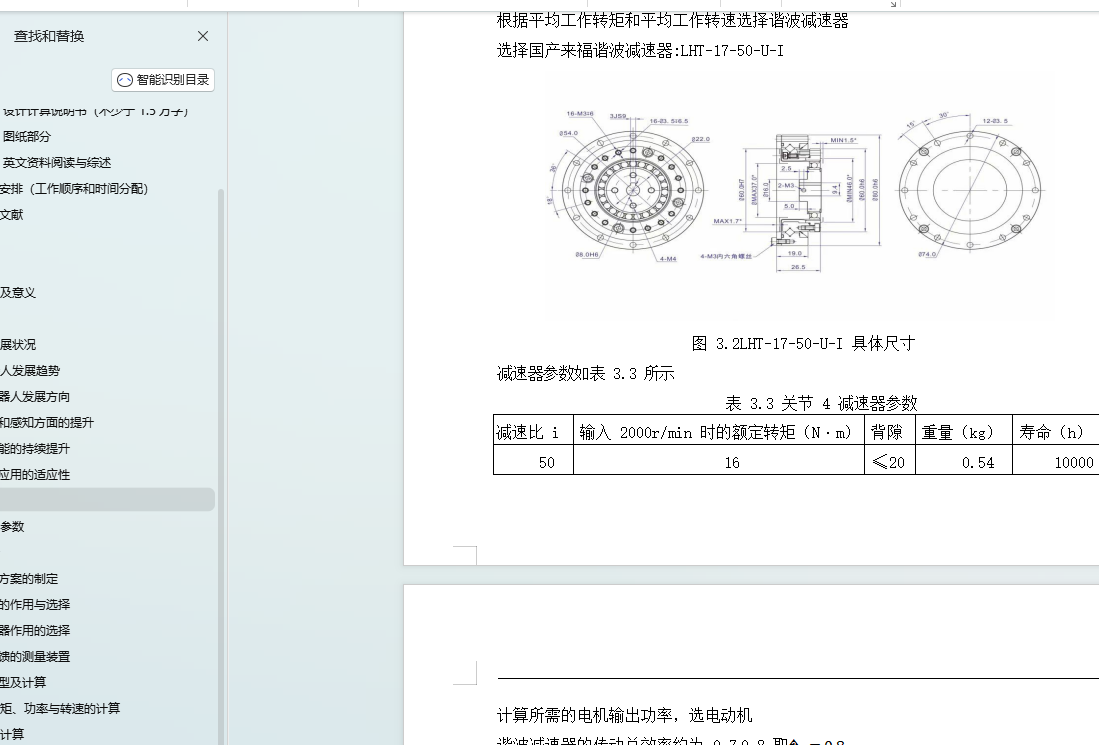
2.2.2 减速器方案的制定
2.2.3 驱动器的作用与选择
2.2.4 双编码器作用的选择
2.2.5 传感反馈的测量装置
3 关节零部件选型及计算
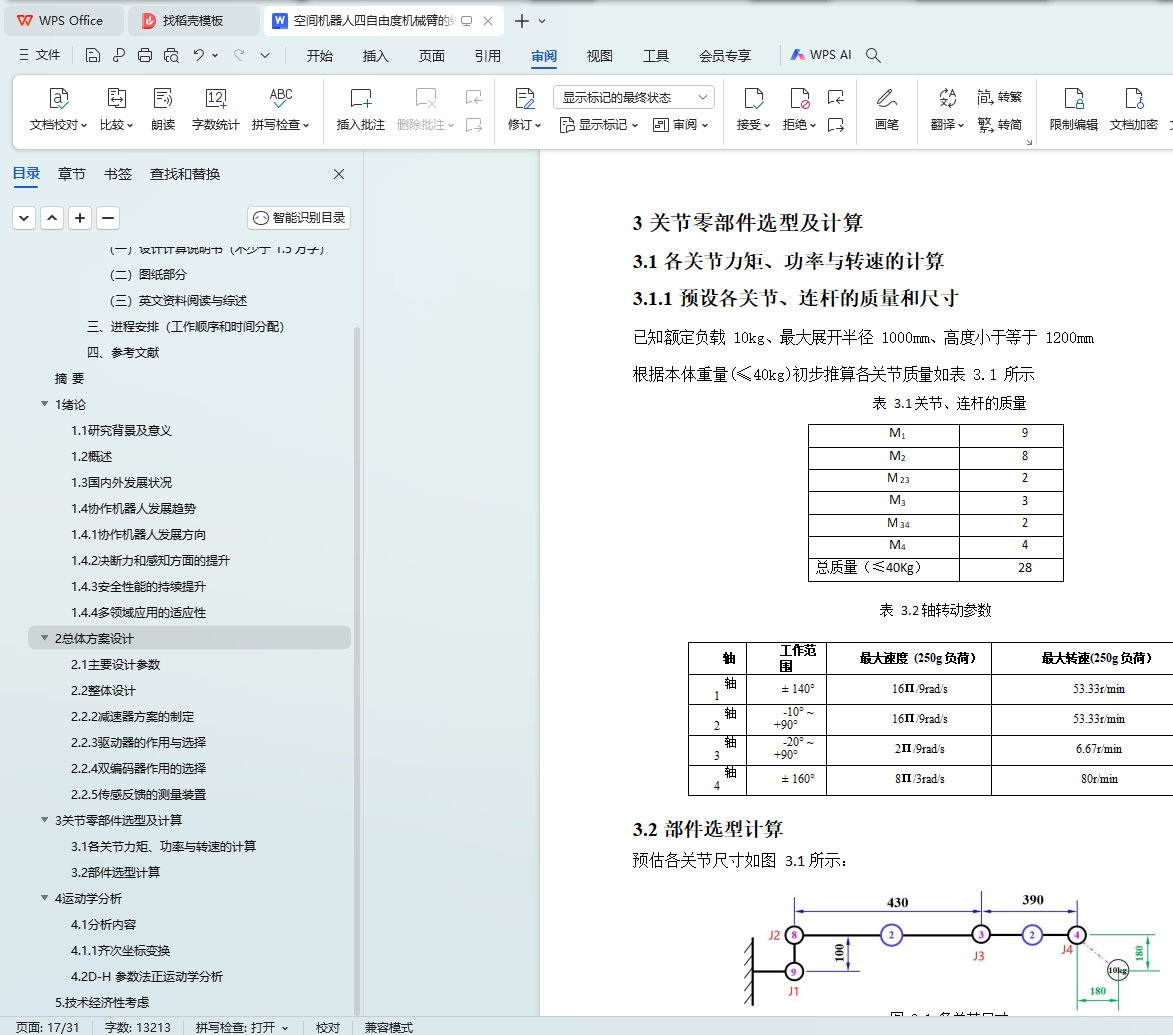
3.1 各关节力矩、功率与转速的计算
3.2 部件选型计算
4 运动学分析
4.1 分析内容
4.1.1 齐次坐标变换
4.2 D-H 参数法正运动学分析
5.技术经济性考虑