摘 要
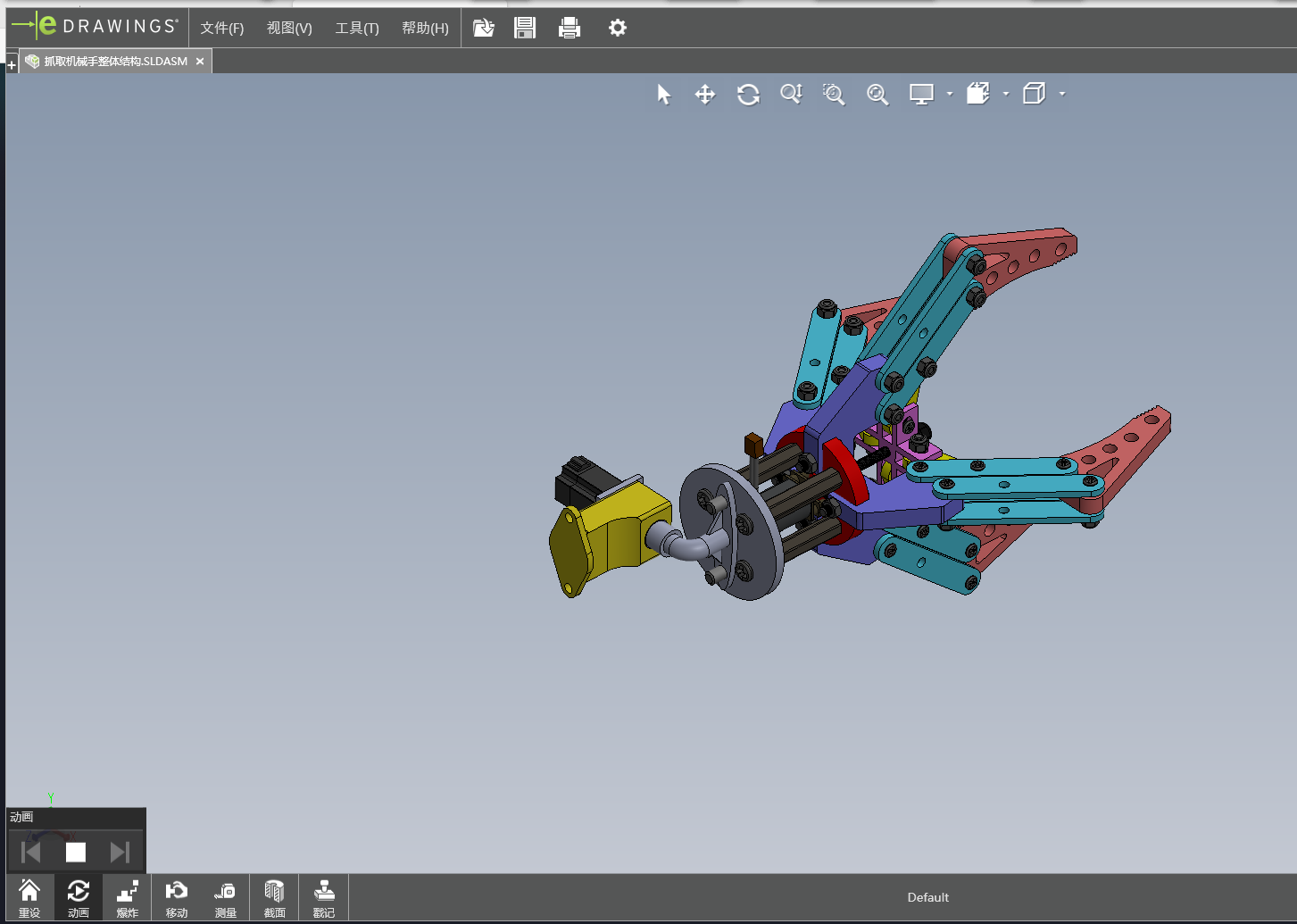
本次设计的课题是抓取曲轴的机械手,由于曲轴的结构形式是不规则的,所以在设计机械手的时候,设计类似于人手一样的结构形式,满足在抓取不规则的曲轴的设计,实现工作上的稳定性和可靠性。防止物体在抓取过程中碰伤、掉落、抓取不稳、受力不均等情况的发生。通过查阅相关的设计文献和资料,选择四爪结构形式的机械手进行设计,设计的优势是扎样的结构有很高的适应能力,具有较高的工作轻度,满足对曲轴的抓取,实现对物体的搬运,在结构上和人工搬运的能力一样,实现机械化传动的设计优点。在总体结构的设计上考虑其机械综合运用的能力,设计结构紧凑,质量轻等设计优点。为了达到机械手的通用性,本次设计主要以四爪机械手为主。通过运用SolidWorks软件绘制四爪机械手的结构,进行总体结构的设计,绘制二维工程图纸。
关键词:机械手、连杆、丝杆、曲轴
Abstract
The subject of this design is to grasp the crankshaft manipulator, because the structure of the crankshaft is irregular, so in the design of the manipulator, the design is similar to the structure of human hands, to meet the design of grasping the irregular crankshaft, to achieve the stability and reliability of the work. It can prevent the objects from bumping, falling, unstable grasping and uneven force in the process of grasping. Through consulting the relevant design literature and information, the manipulator with four claw structure is selected for design. The advantage of the design is that the structure of binding sample has high adaptability and high working efficiency, which can meet the requirements of grasping the crankshaft and carrying objects. The structure is the same as the ability of manual handling, which can realize the design advantages of mechanized transmission. In the design of the overall structure, the ability of comprehensive use of machinery, compact structure and light weight are considered. In order to achieve the versatility of the manipulator, this design is mainly based on the four claw manipulator. Through the use of SolidWorks software to draw the structure of the four claw manipulator, the overall structure of the design, drawing two-dimensional engineering drawings.
Key words: manipulator, connecting rod, worm, crankshaft
目 录
第一章 绪论
1.1 课题研究的意义及背景
1.2 机械手研究概况
1.2.1国外研究现状
1.2.2国内研究现状
1.3 研究的内容
第二章 抓取物体机械手总体结构设计
2.1机械手设计思路
2.2总体方案的设计
2.2.1驱动方式的选择
2.2.2传动结构的分析
2.2.3传动方案的设计
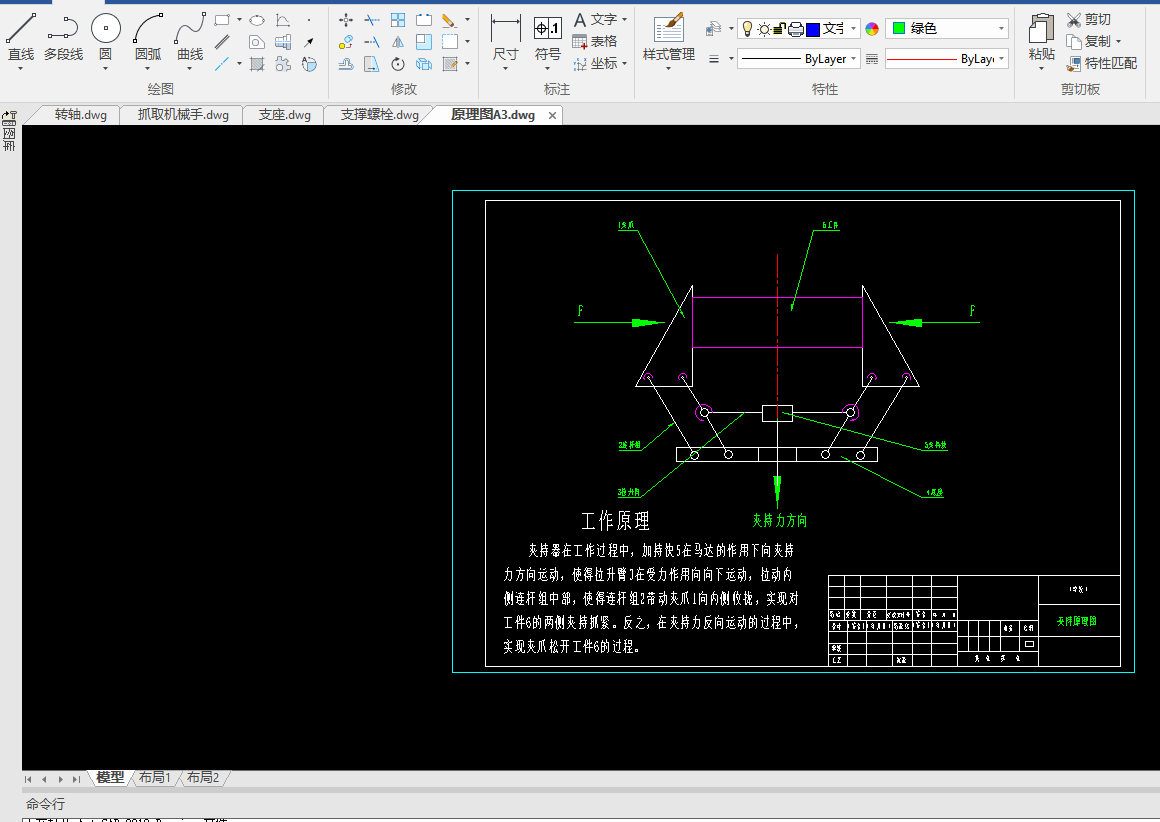
2.3机械手机械传动原理
2.4夹持物体机械手典型的结构
第三章 机械手结构设计计算
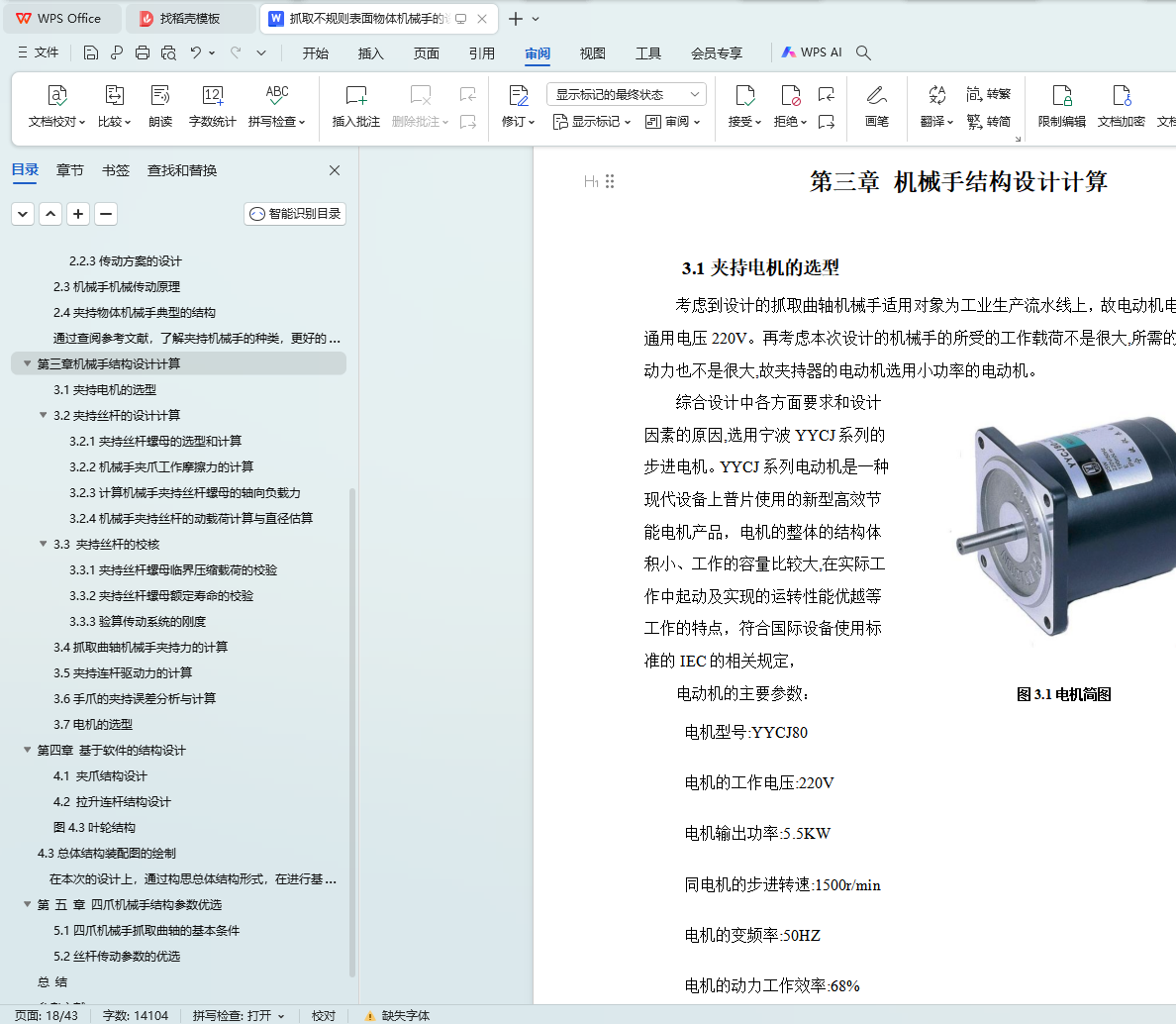
3.1夹持电机的选型
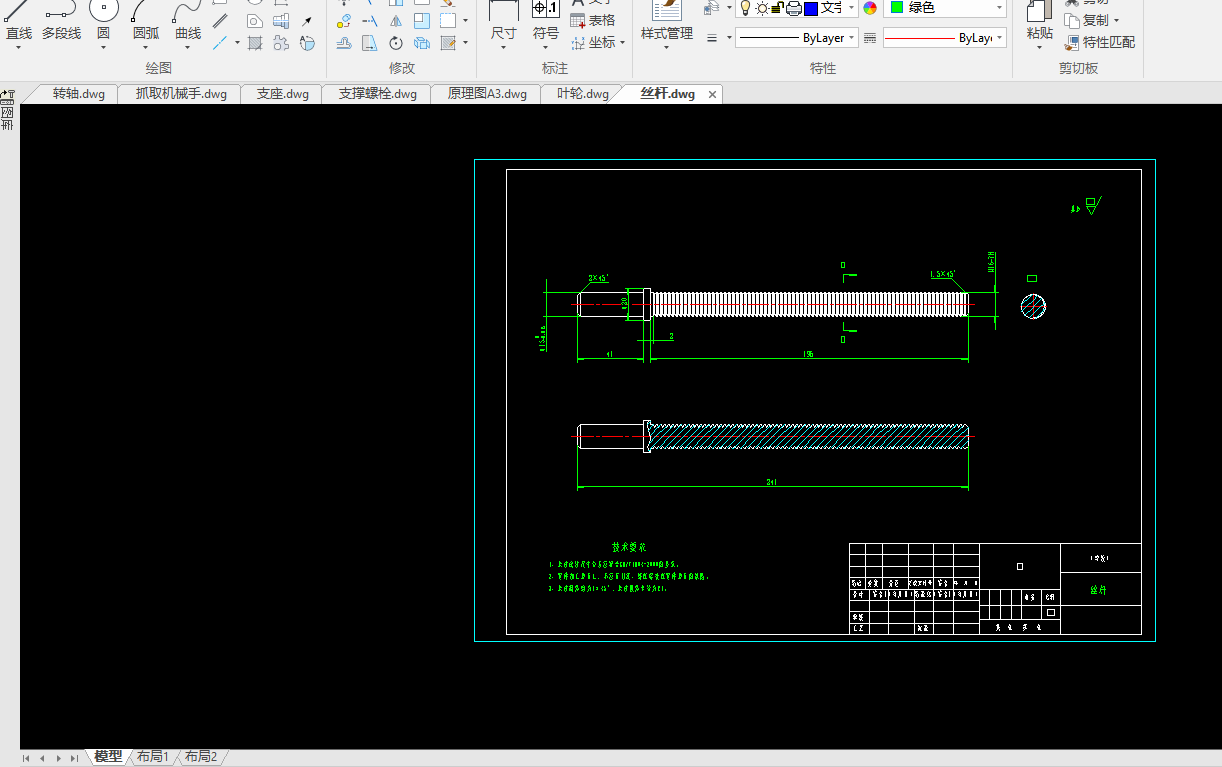
3.2夹持丝杆的设计计算
3.2.1夹持丝杆螺母的选型和计算
3.2.2机械手夹爪工作摩擦力的计算
3.2.3计算机械手夹持丝杆螺母的轴向负载力
3.2.4机械手夹持丝杆的动载荷计算与直径估算
3.3 夹持丝杆的校核
3.3.1夹持丝杆螺母临界压缩载荷的校验
3.3.2夹持丝杆螺母额定寿命的校验
3.3.3验算传动系统的刚度
3.4抓取曲轴机械手夹持力的计算
3.5夹持连杆驱动力的计算
3.6手爪的夹持误差分析与计算
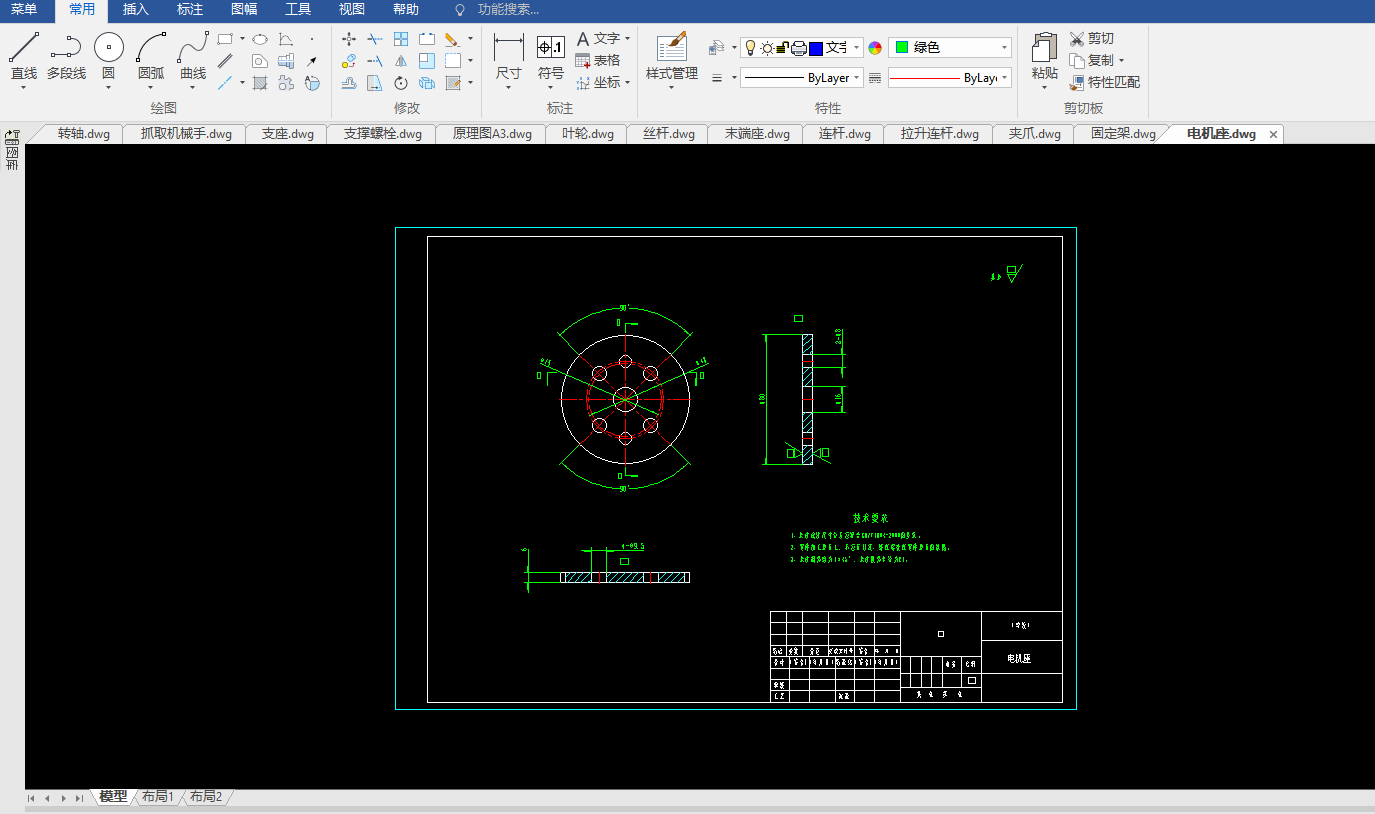
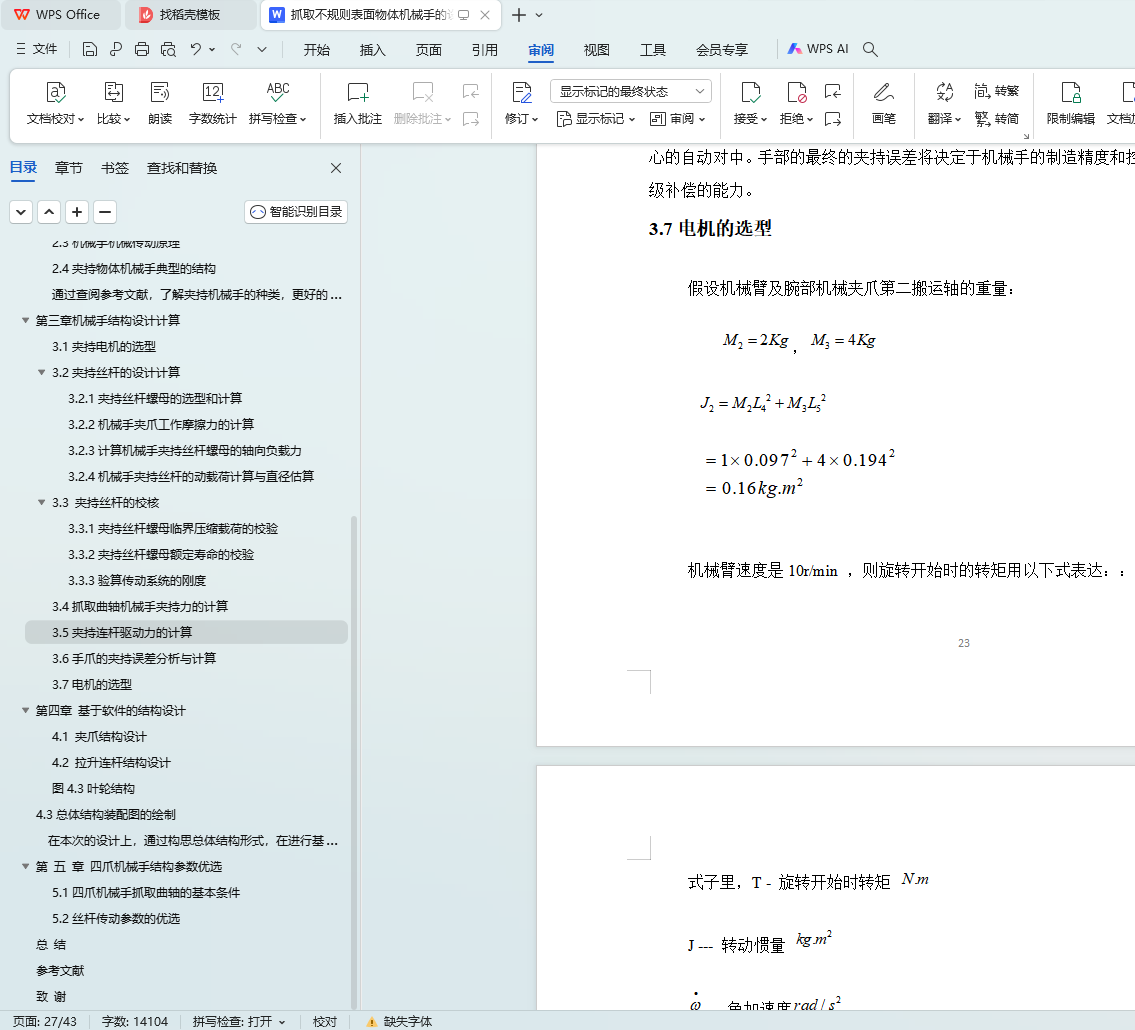
3.7电机的选型
第四章 基于软件的结构设计
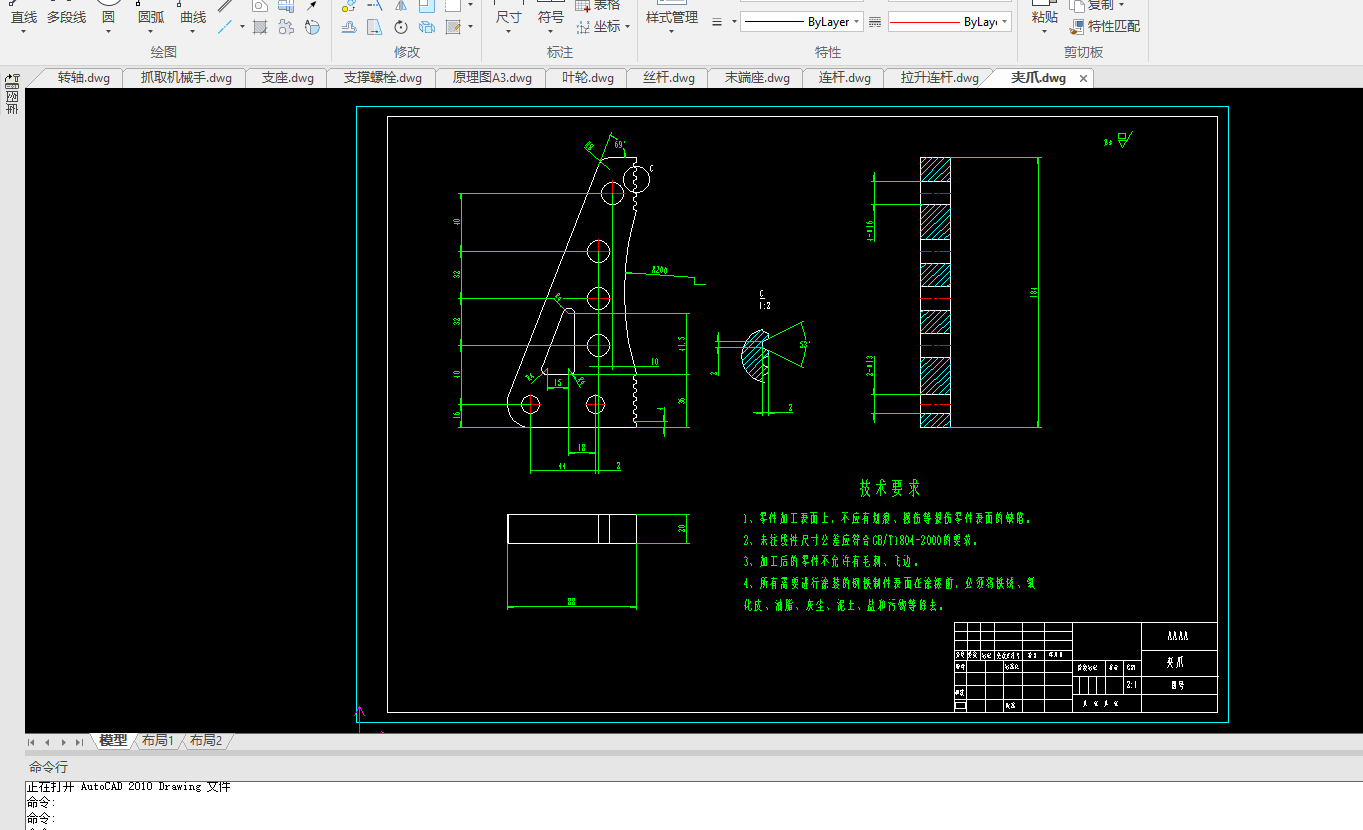
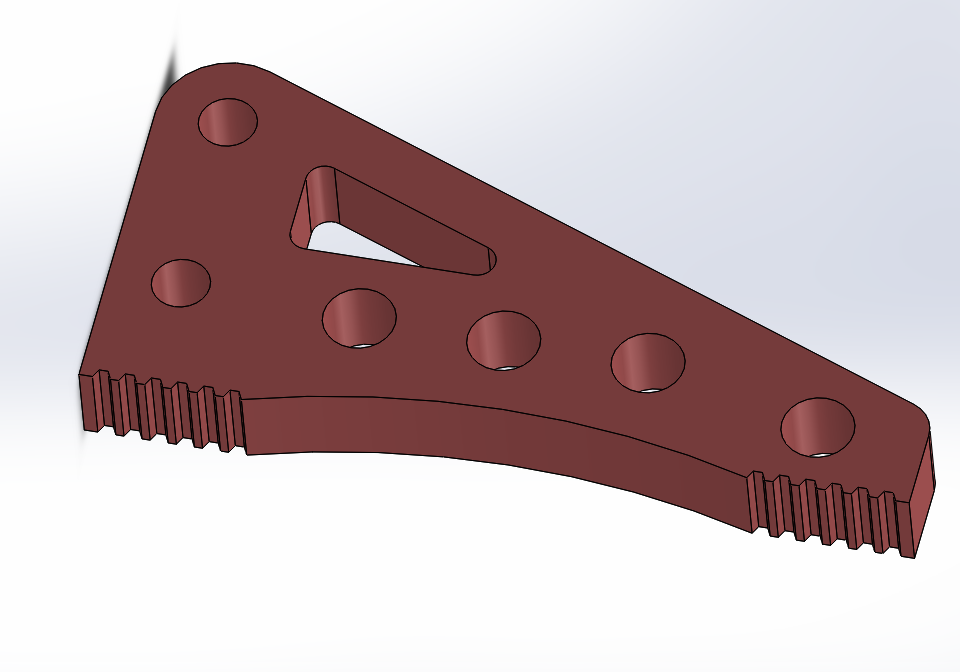
4.1 夹爪结构设计
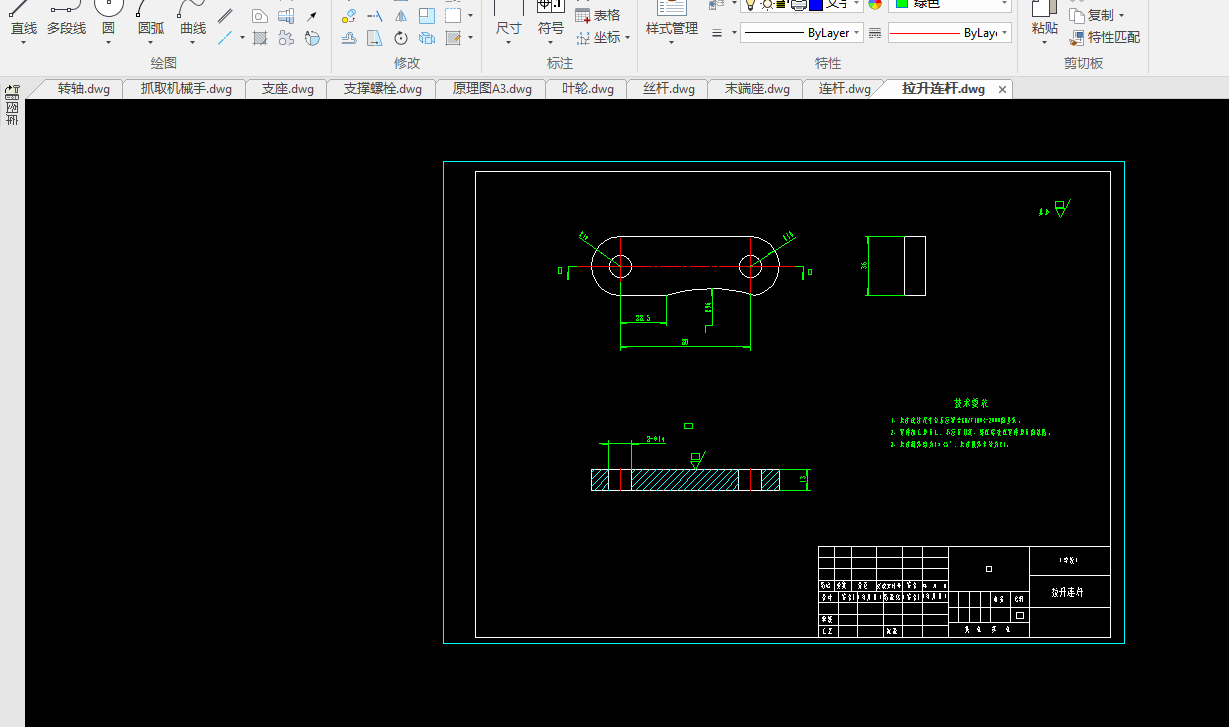
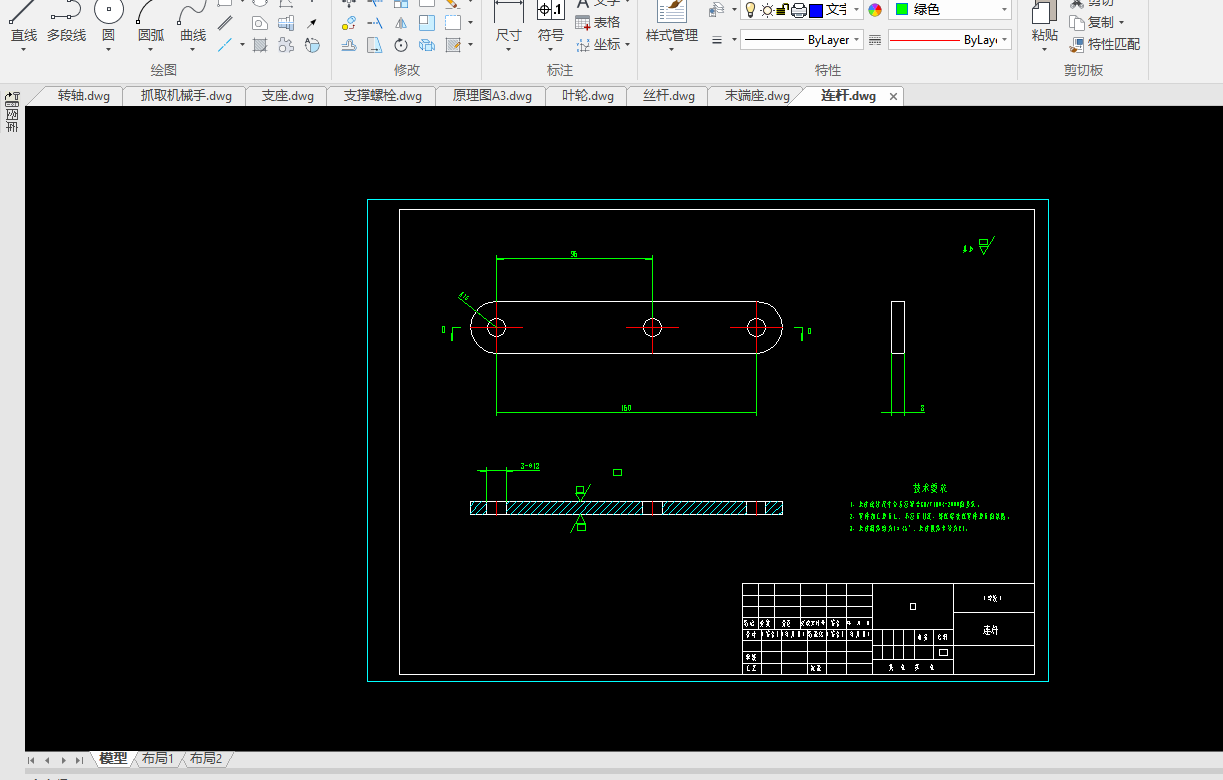
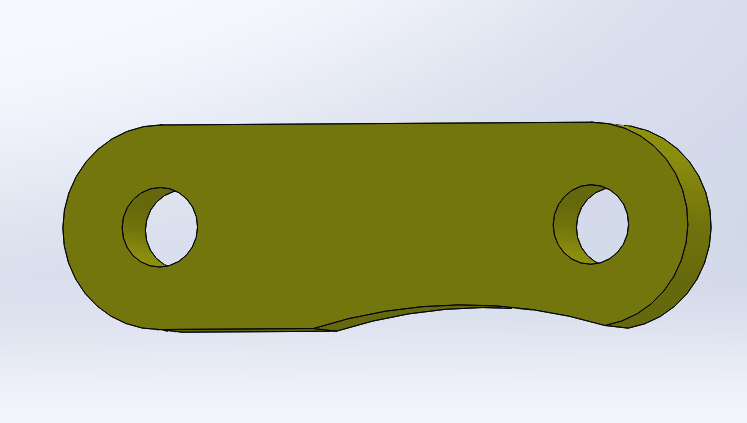
4.2 拉升连杆结构设计
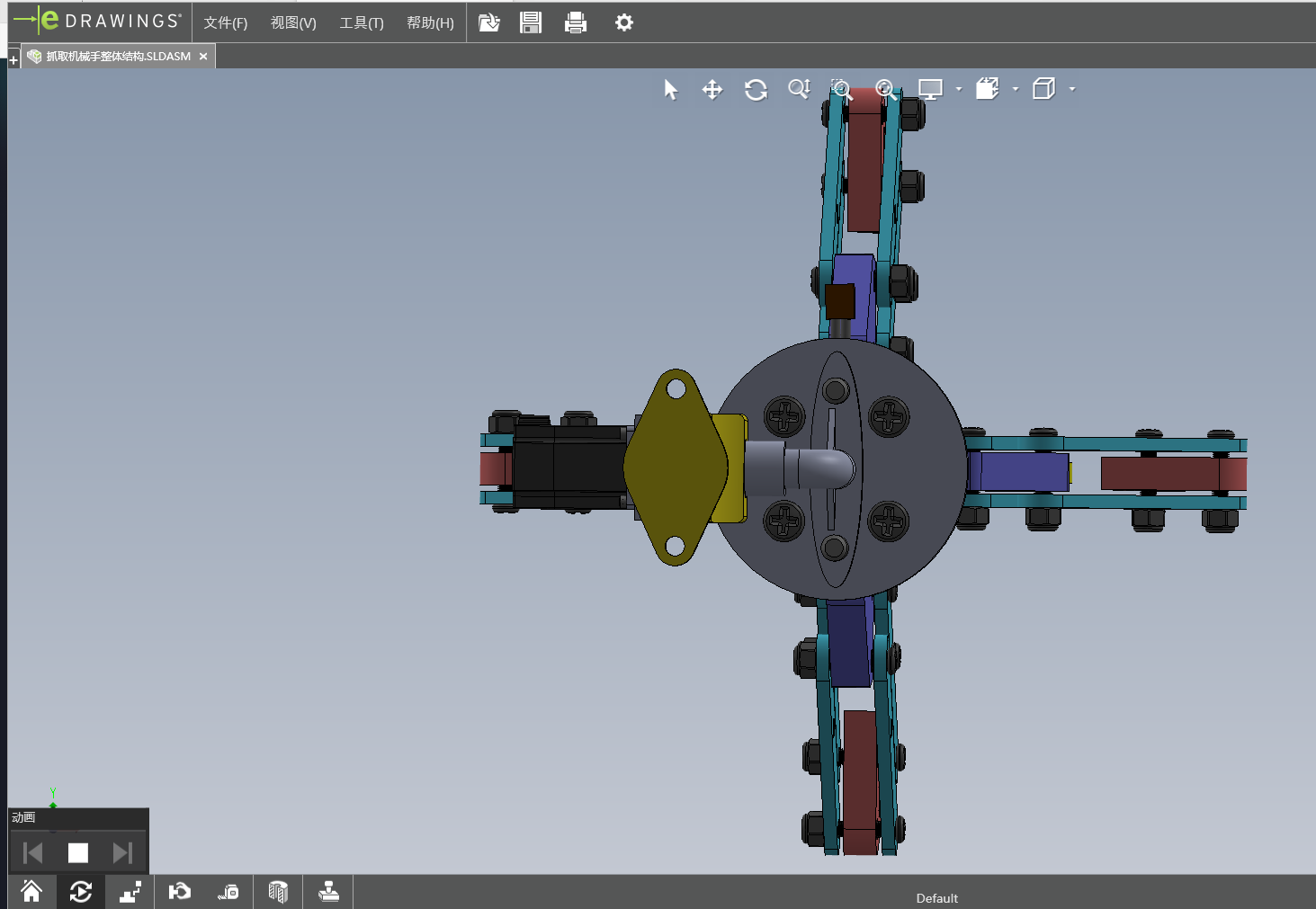
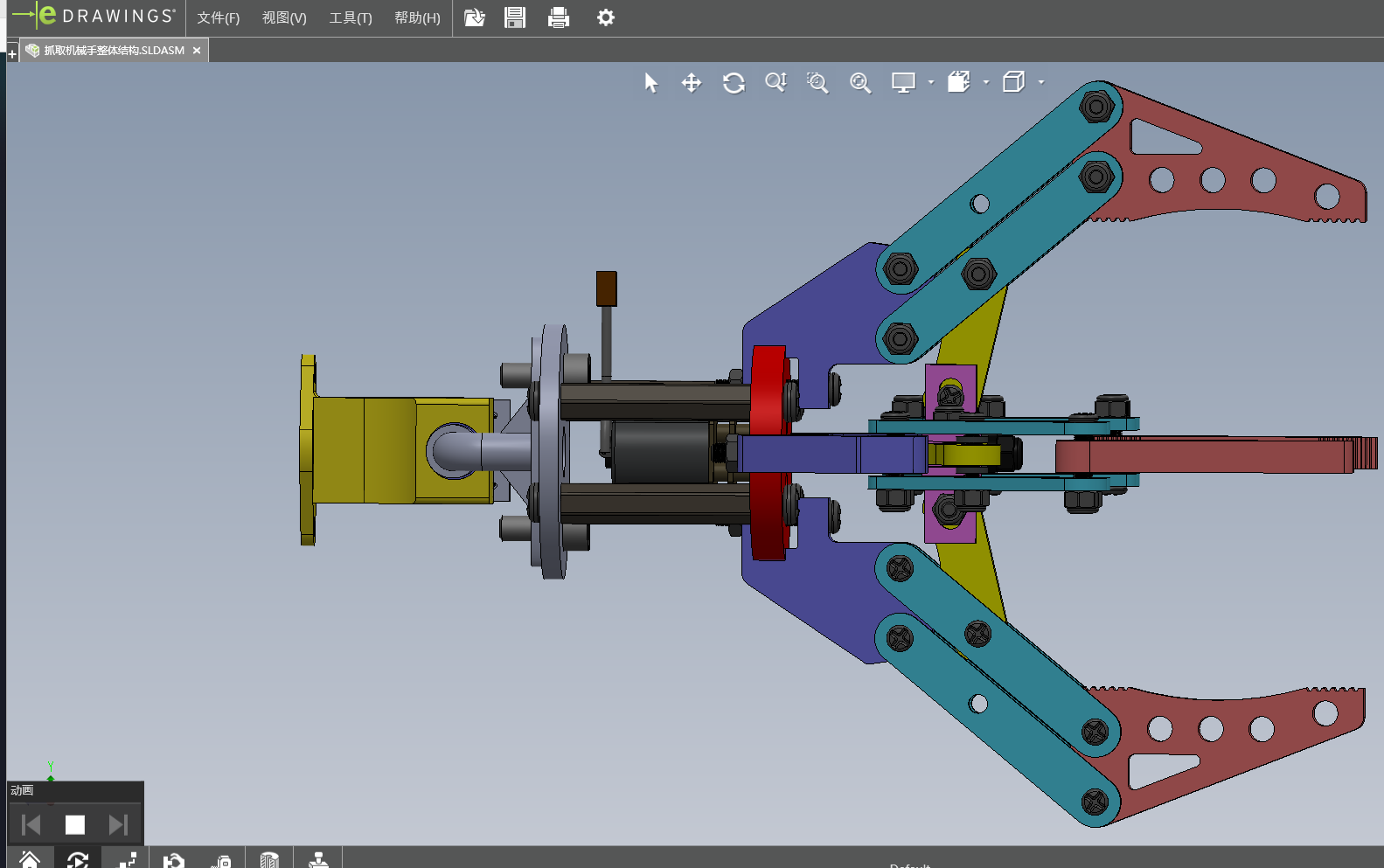
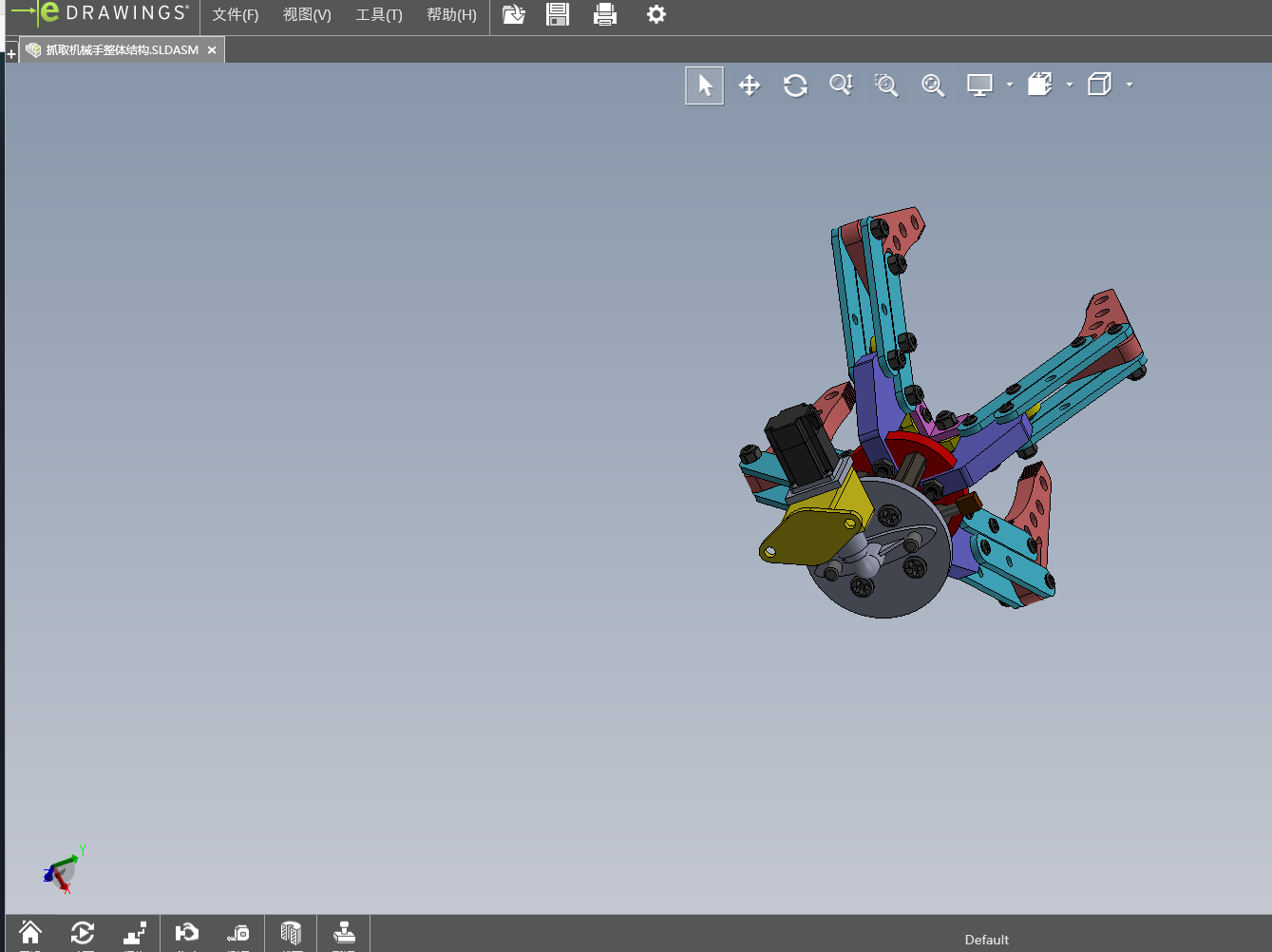
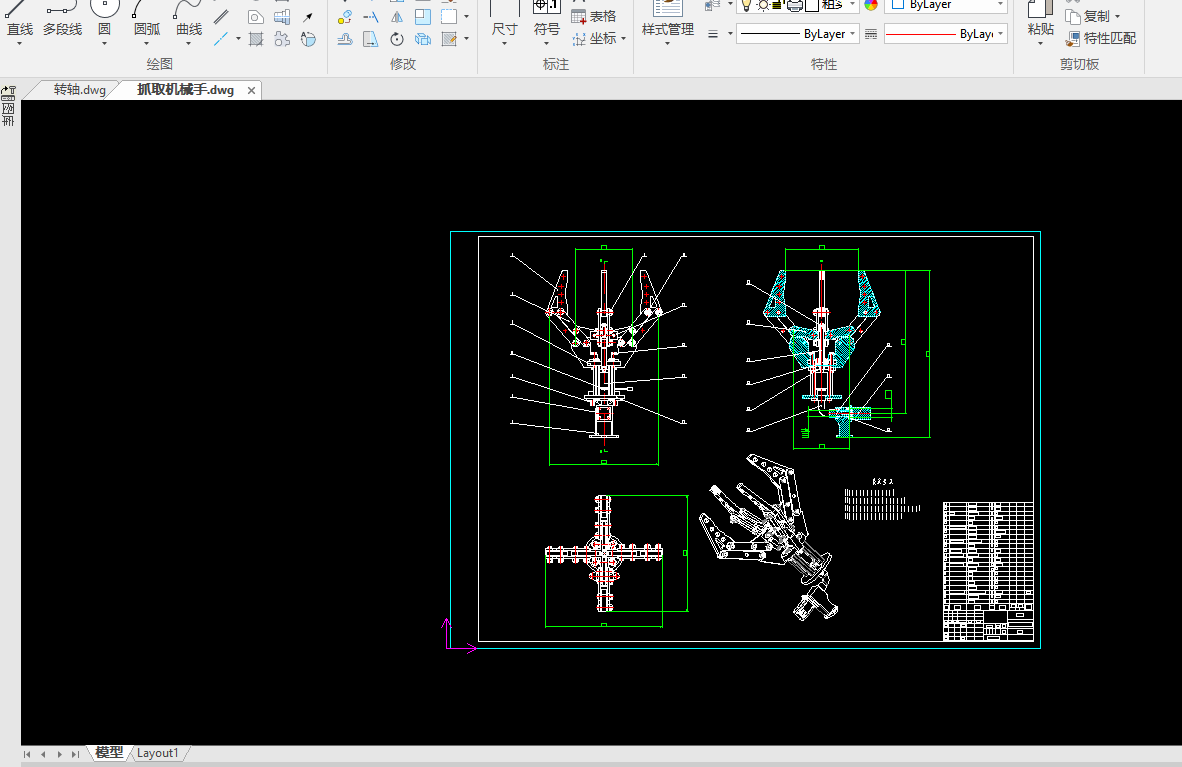
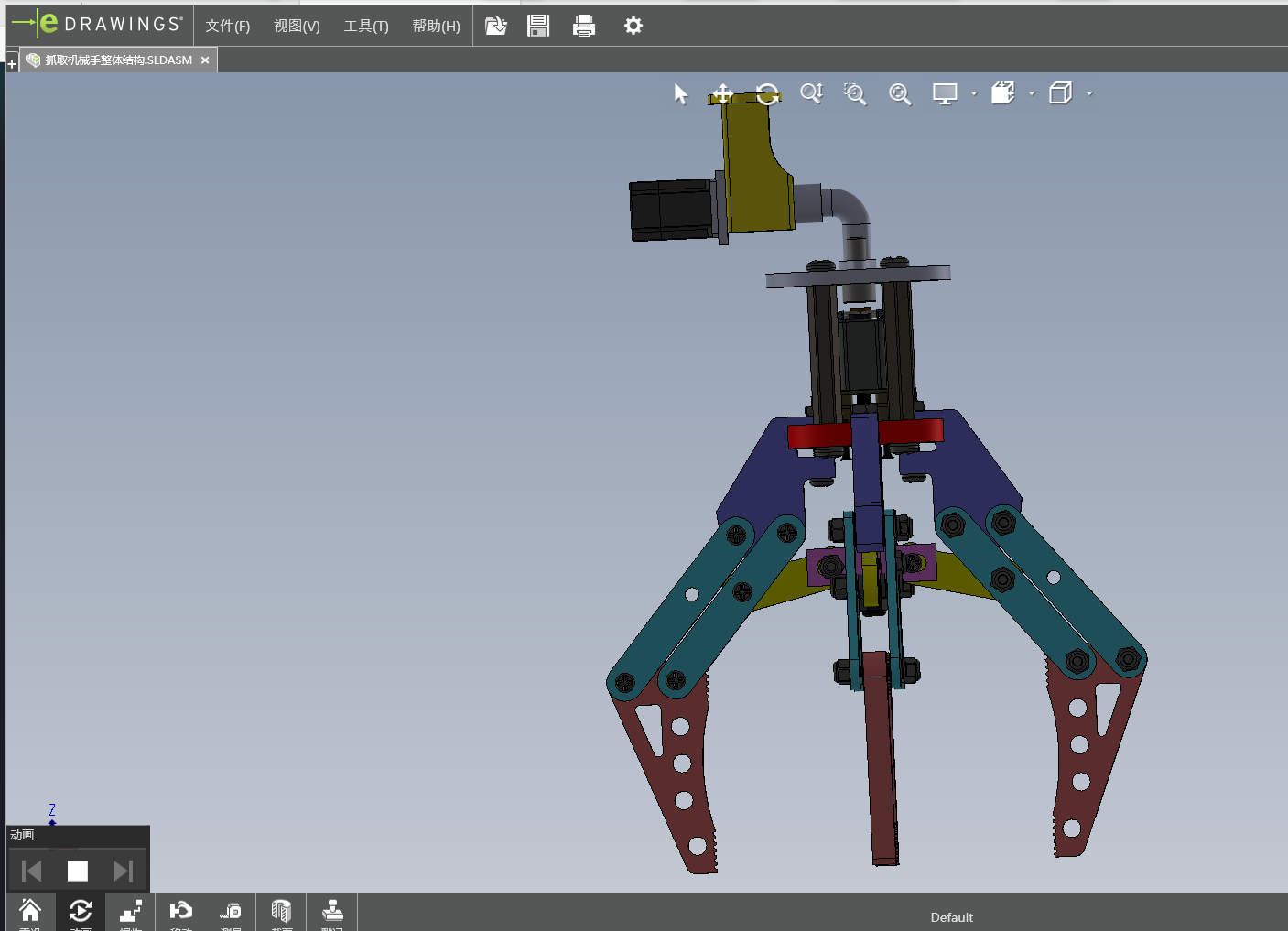
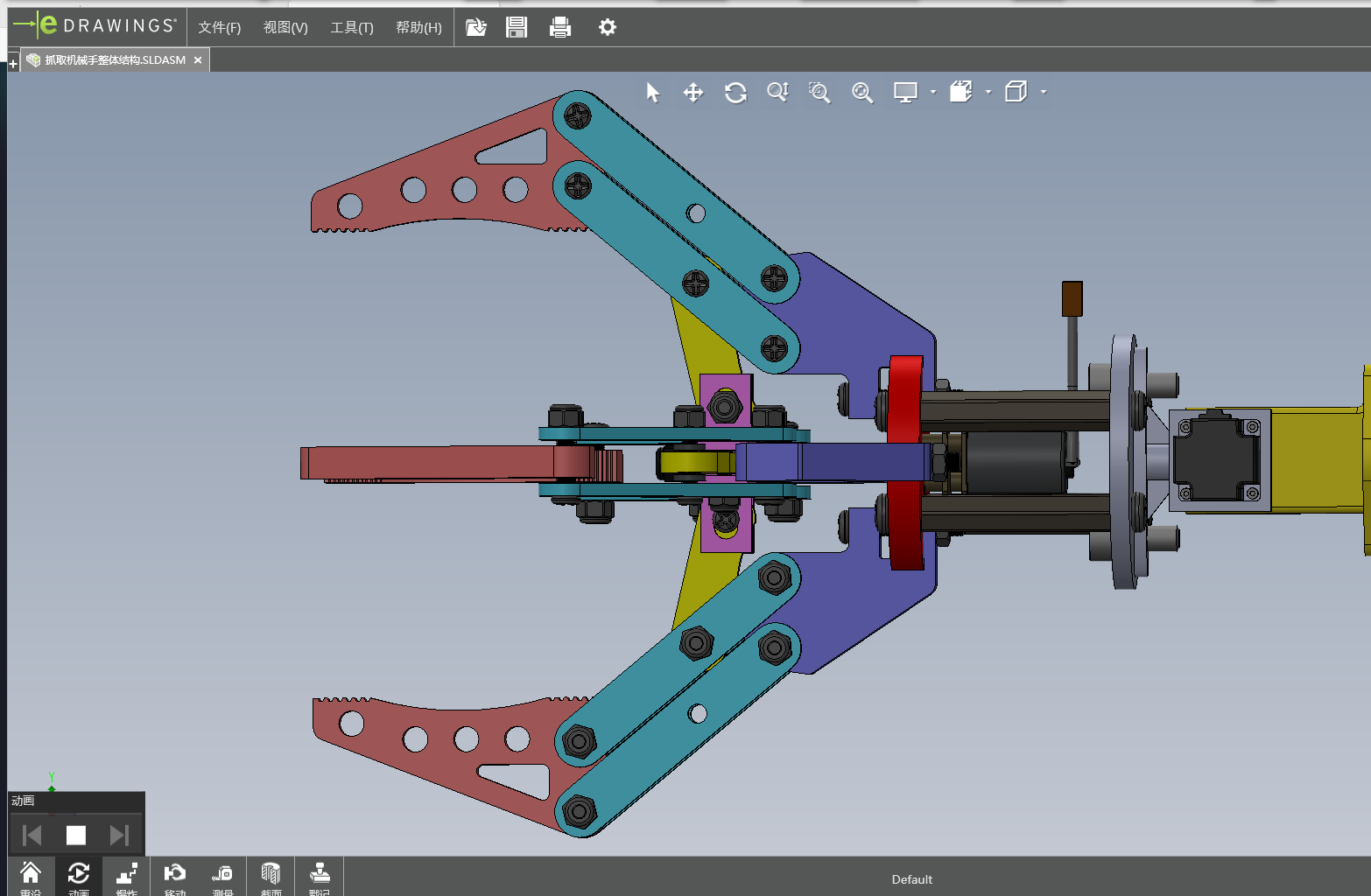
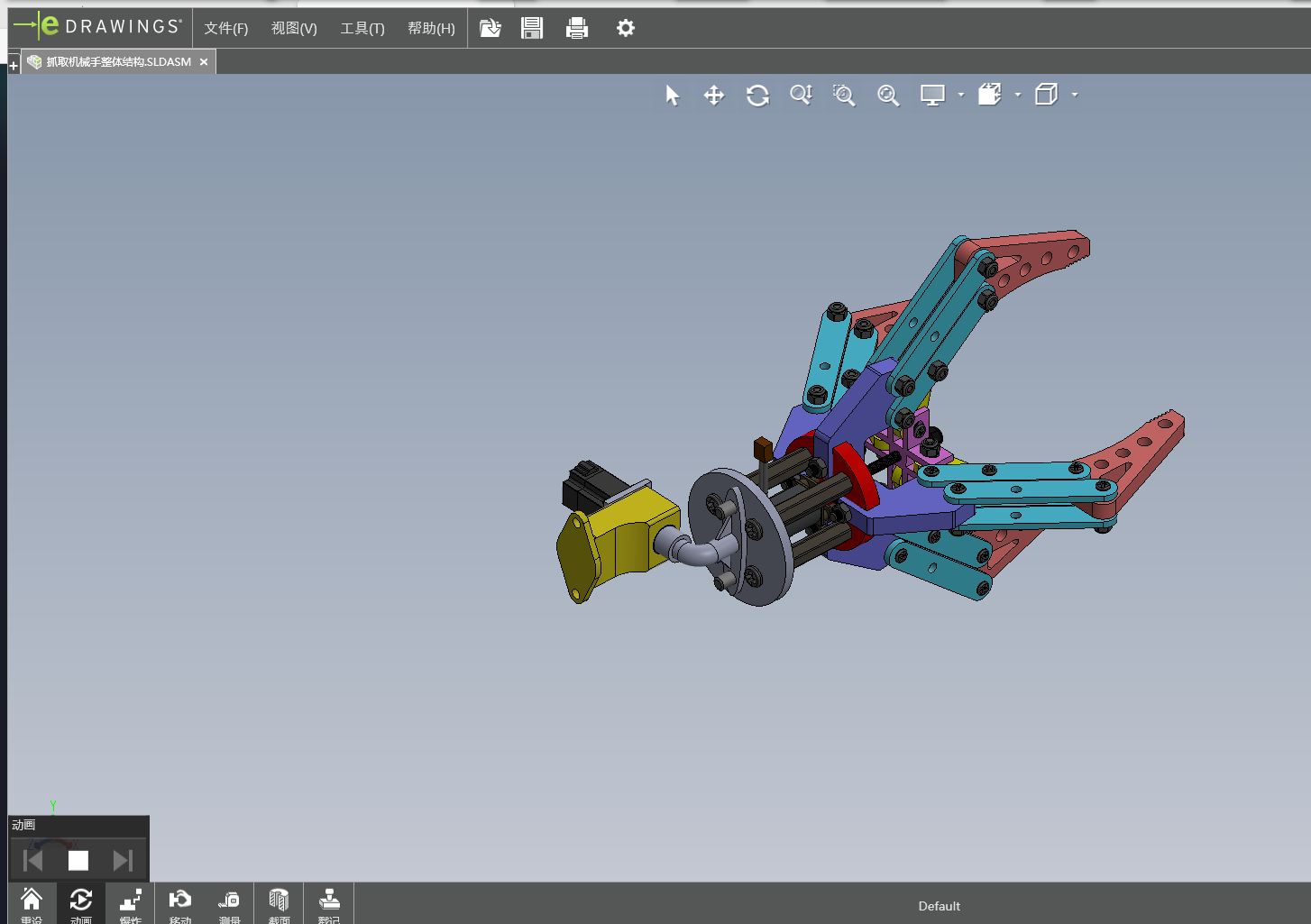
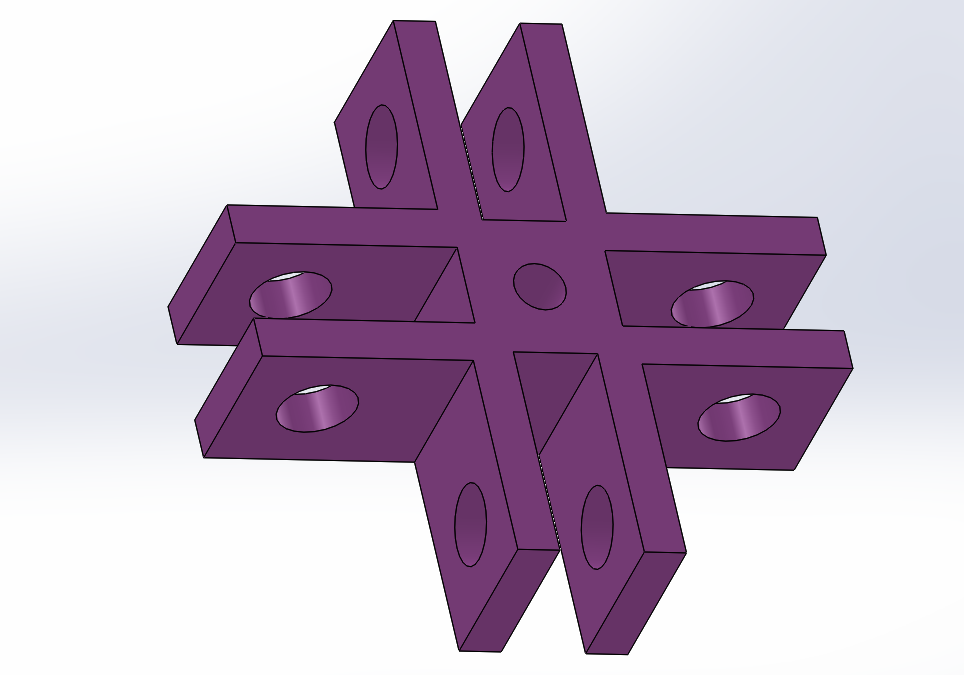
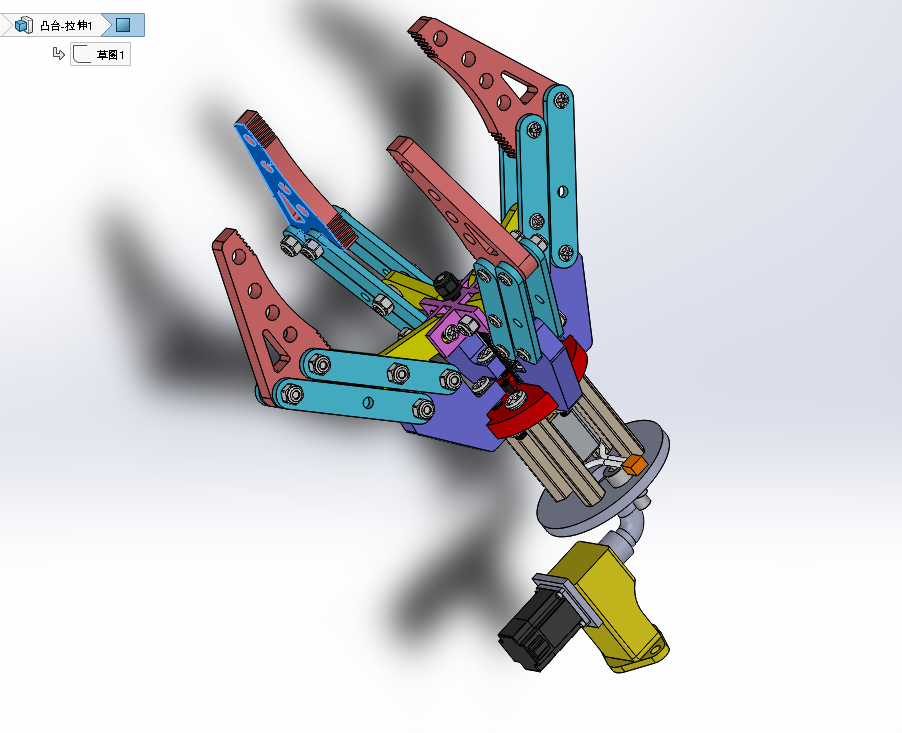
4.3总体结构装配图的绘制
第 五 章 四爪机械手结构参数优选
5.1四爪机械手抓取曲轴的基本条件
5.2丝杆传动参数的优选
总 结
参考文献
致 谢