摘 要
从近代纺纱方法的历史,我们可以得出一个重要的结论,即近代纺纱技术的发展,是加捻及纺纱方法的革新把纺织科学技术推进一个又一个新阶段。加捻方法实质的改革是近代纺纱方法改革的核心。加捻方法己由传统的单捻发展到三、四倍高倍捻。随着高倍加捻方法的发展,基于高倍加捻方法的捻线机也随之产生。新型捻线机是采用高倍加捻原理对各种纤维的纱线进行高效加捻的纱线加工设备。加捻的目的是通过改善纱线中纤维的受力状况使纱线的结构发生改变,获得一定的物理机械性能,从而提高纱线的品质。加捻的质量对纱线的后加工及面料的品质有着十分重要的影响。我国加捻用的传统捻线机设备己经不能满足上述需求。
本次毕业设计的捻线机控制系统是采用机电一体化技术和PCI总线技术开发的一种新型捻线机控制系统。新型捻线机的控制系统多采用多电机传动系统,目前国内主要采用单片机控制,针对其控制系统的缺点,设计了基于PCI总线的新型捻线机控制系统。传动系统采用4个电动机的多电机传动,运用解析法对新型捻线机的多电机传动系统进行运动分析建立适合多电机传动系统的数学模型,综合运用交流伺服技术、变频调速技术和PCI局部总线控制技术,结合捻线工艺理论设计出合理的控制系统。通过VisualBasic语言实现可视化设计,通过人机界面输入不同的参数,经设计程序计算,将参数转换为控制信号,驱动电机和执行机构运动,完成加捻、卷绕、防叠、防硬边及捻度变换等功能,得到规定捻度的纱线。
新型捻线机控制系统的突出优点是:机械结构简单,有利于维护与保养传动路线缩短,功耗减少,故障率低,控制方便,适合小批量、多品种生产,软件系统维护简单,人机界面操作方便,程序移植性好。总线技术在捻线机控制系统上的应用提高了捻线机的技术含量、附加值和市场竞争力。
关键词:新型捻线机;运动控制;交流伺服电机;PCI总线
Abstarct
An impotrant conclusion is drawn that the ernovation of twisting methods and spinning methods improve textile technology in the later-day development of spinning technology from many spinning methods.The renovation of twisting methods is the coer of the spinning technology.Twisting methods have developed from traditional single-twisting to multi-twisting.With the development of multi-twisting technology,the twister based on multi-twisting theory comes into being.Latest-twisting-machine is aprocessing yarn equipment that twists yarns of various fiber highly eficiently based on multi-twisting theory.The purpose of twisting is to make yarn sacquire some physical capabilities changing the structure of the yams,and to improve the quality of the yams.The quality of twisting has a very important effcet on the succedent process of yarns and the quality of cloth.The traditional twisters do not satisfy the serequirements.
The design of the twister graduated control system is the use of mechatronics technology and PCI bus technology to develop a new type of Twisting Machine Drive and Control System.New control system twister use of multi-motor drive system, the current major use of single-chip control, control system for its shortcomings, based on the PCI bus design a new type of control system. 4 motor drive system using the multi-motor drive, Analytical method using the new multi-twister motor drive system for motion analysis for multi-motor drive system to establish the mathematical model.Comprehensive use of AC servo technology, VVVF technology and PCI Local Bus control technology, combined with the theoretical design process twister reasonable control system.The Visual Basic is used to realize modularized design.Different parameters are inputted by human-computerinterface,calculated and converted intocontrol signal by program,which drives motors and execute mechanism to realize twisting,winding and changing twisting degrce so on,to gain required yarn.
The prominent virtues of the transmission and control system are the following:the simple structure of the machine is propitious to maintain;the shortt ransmission route lessens energy consumption and the malfunctions;the convenient control adapts to the small batch and many varieties produce.The main tenance of the softwaer is simple,the operation of the human-computer interface is convenient,and the transplant of the program is very good.The application of the localbus technology in the control system improves the technology content,the Add-onsvalue and the market competition competence of the whole machine.
Keywords:the latest-twisting machine;motion control;AC servo motor;PCI bus
目 录
1. 绪论………………………………………………...……………...……………1
1.1 国内外捻线机的研究现状与发展趋势…………………………………1
1.2 课题研究的目的和意义……...……………………….……………………4
1.3 本文研究的主要内容……………..………………………………………5
2. 新型捻线机的工作原理简介……………………………….…..………6
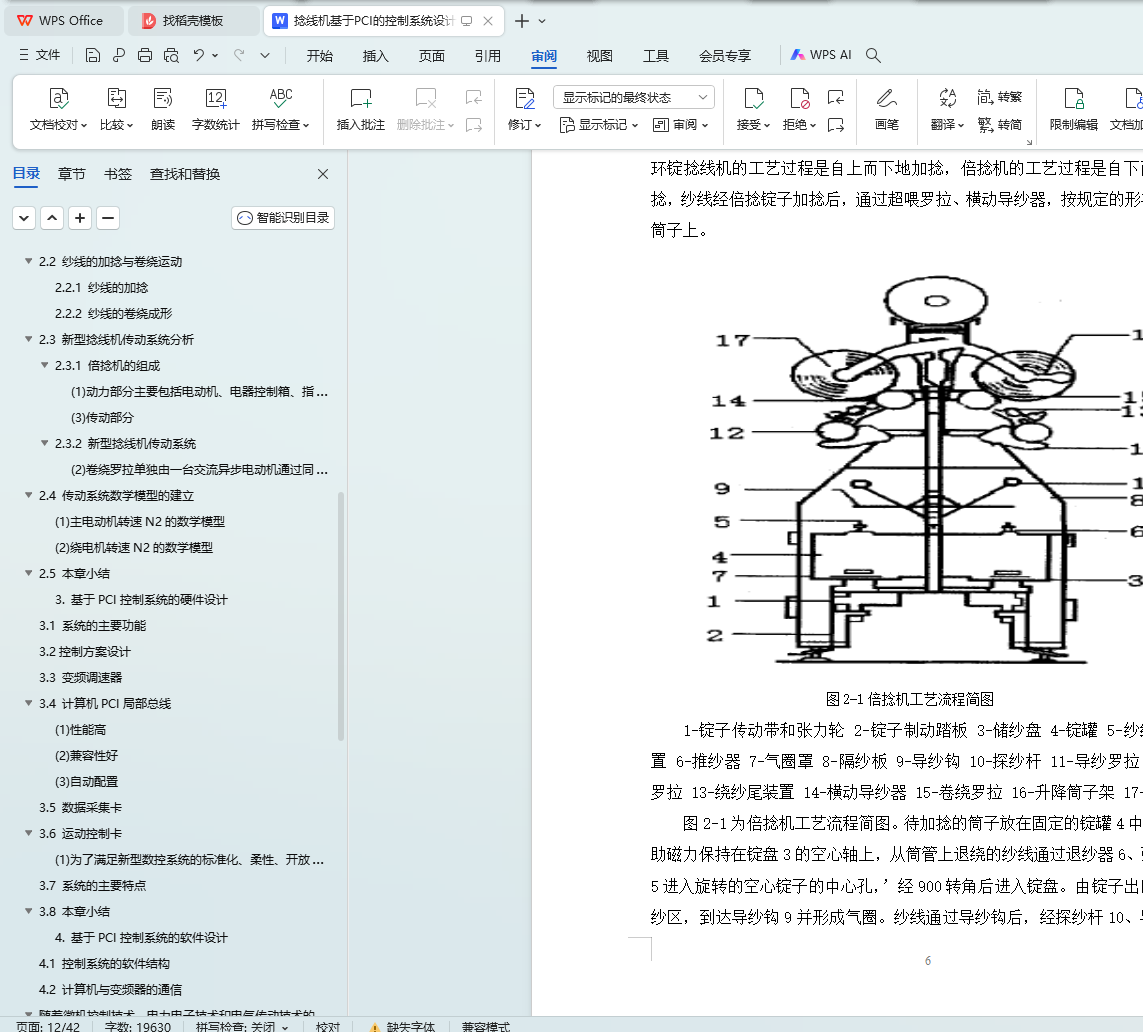
2.1 捻线的工艺过程……………………………………....…………..…………6
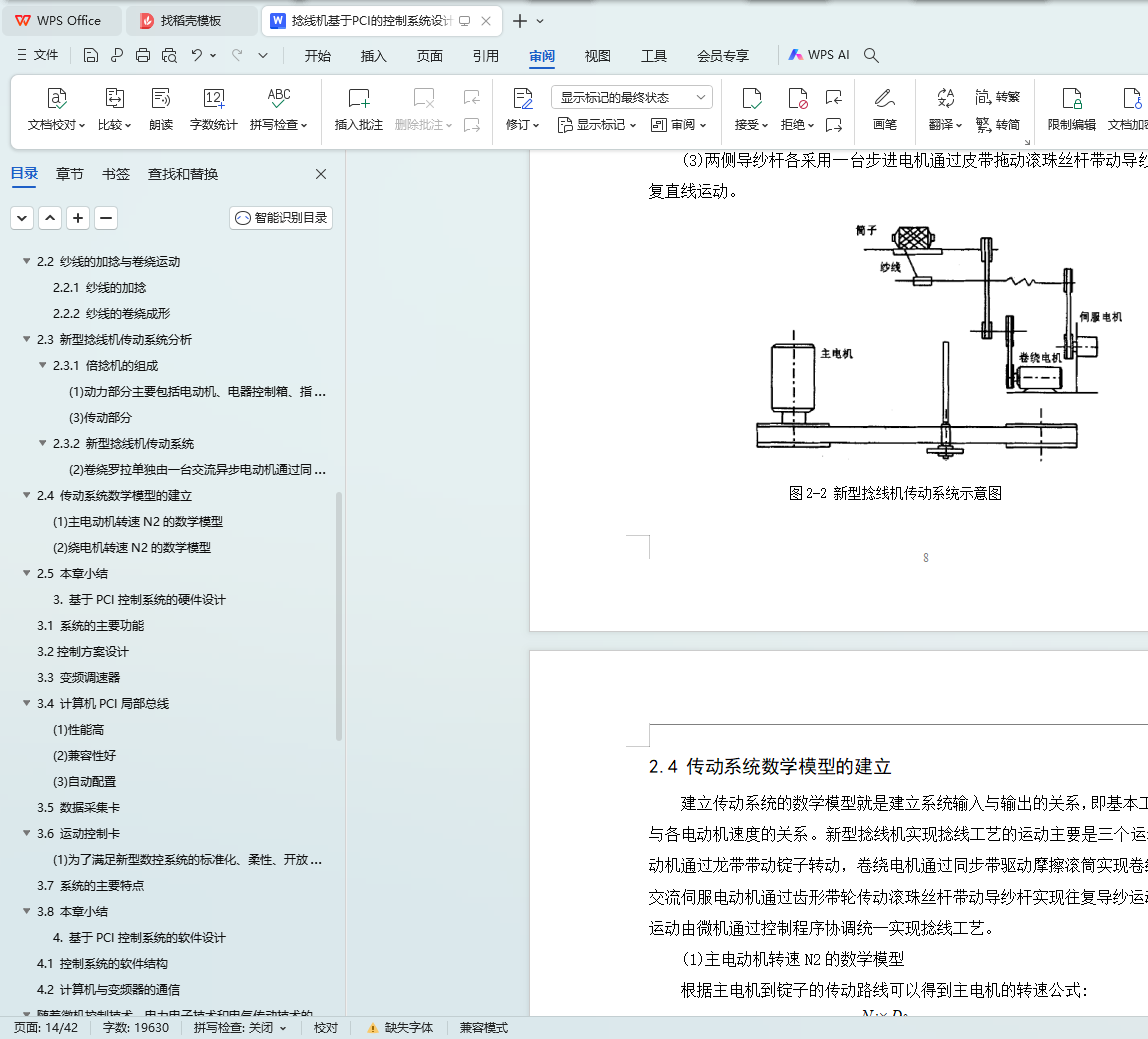
2.2 纱线的加捻与卷绕运动………………………..………………..…………7
2.2.1 纱线的加捻……………………………………….………………………..7
2.2.2 纱线的卷绕成形………………………………………………………….7
2.3 新型捻线机传动系统分析………….…………………………..…………7
2.3.1 倍捻机的组成…….……………………………………………………7
2.3.2 新型捻线机传动系统……….……….....………………………………8
2.4 传动系统数学模型的建立…….……………………………………9
2.5 本章小结………….……………………………….…………………………10
3. 基于PCI控制系统的硬件设计………………………………………11
3.1 系统的主要功能……………………………………………………………11
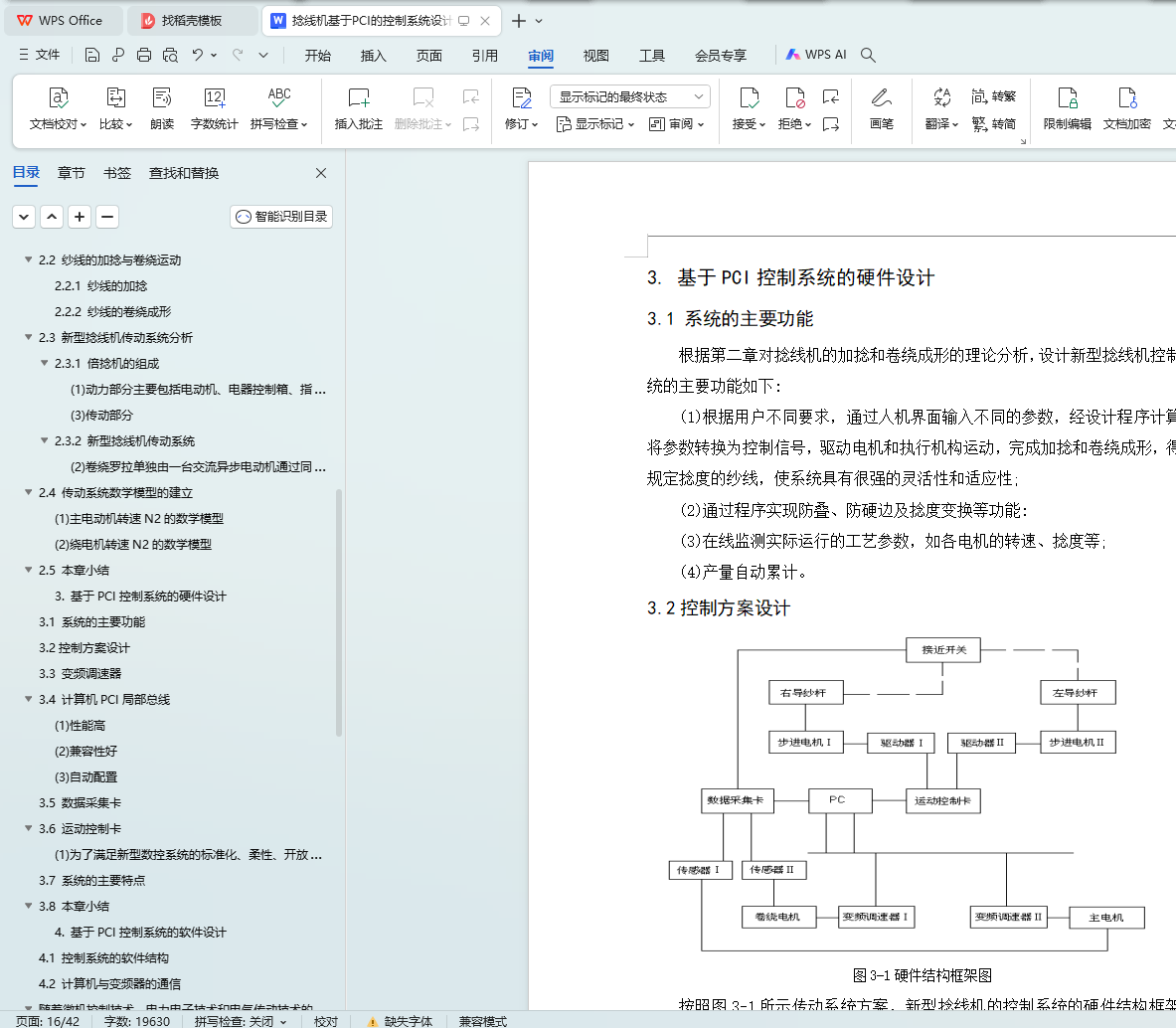
3.2 控制方案设计…………………………….….………..………………11
3.3 变频调速器……………………………………..………...…………………12
3.4 计算机PCI局部总线……………………...…………….…………………12
3.5 数据采集卡…………………………………………….……………………14
3.6 运动控制卡…………………………………………………………………14
3.7 系统的主要特点……………………………………………………………15
3.8 本章小结………………………………………………………………15
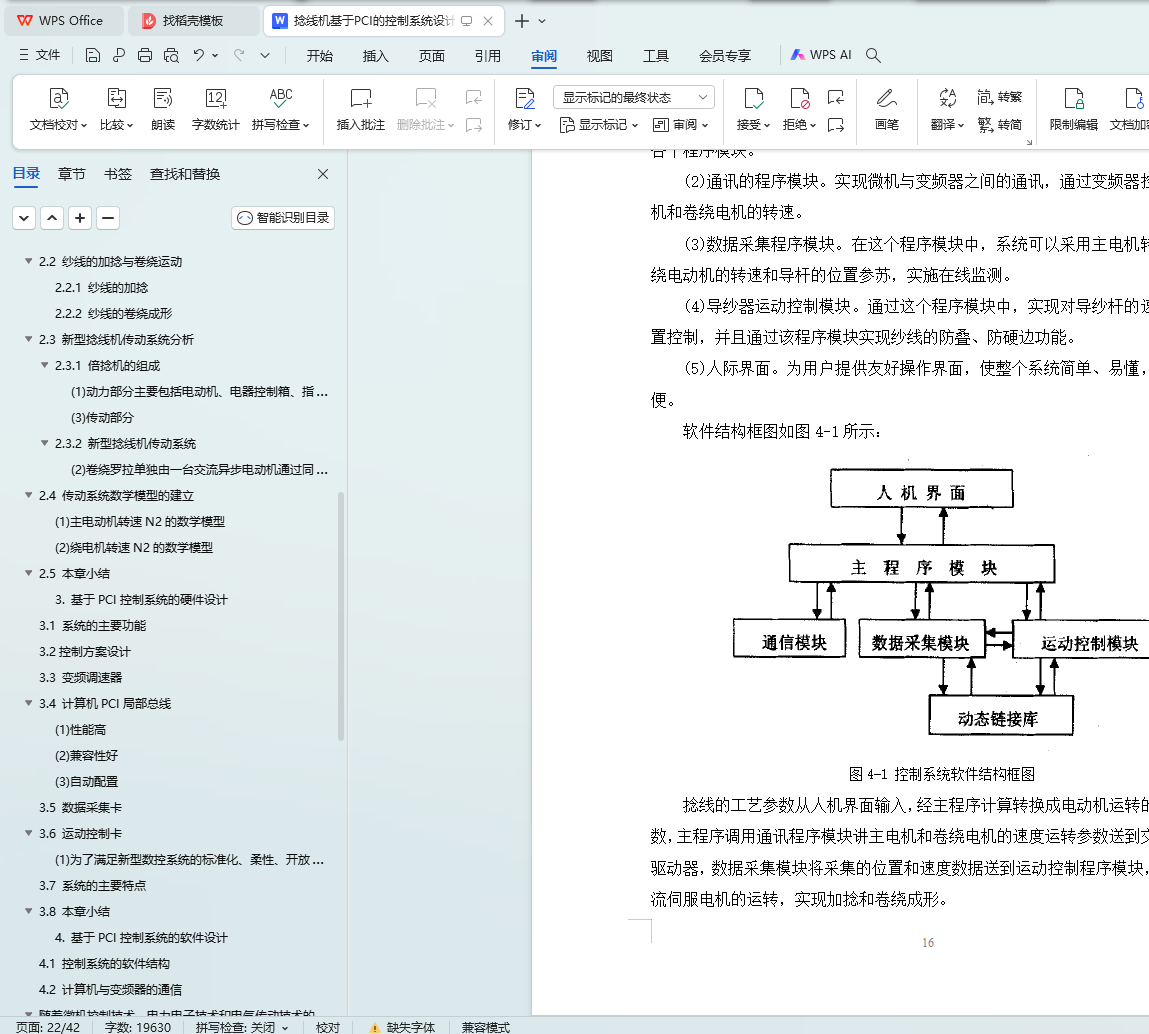
4. 基于PCI控制系统的软件设计…………………………….…………16
4.1 控制系统的软件结构……………………………………………………17
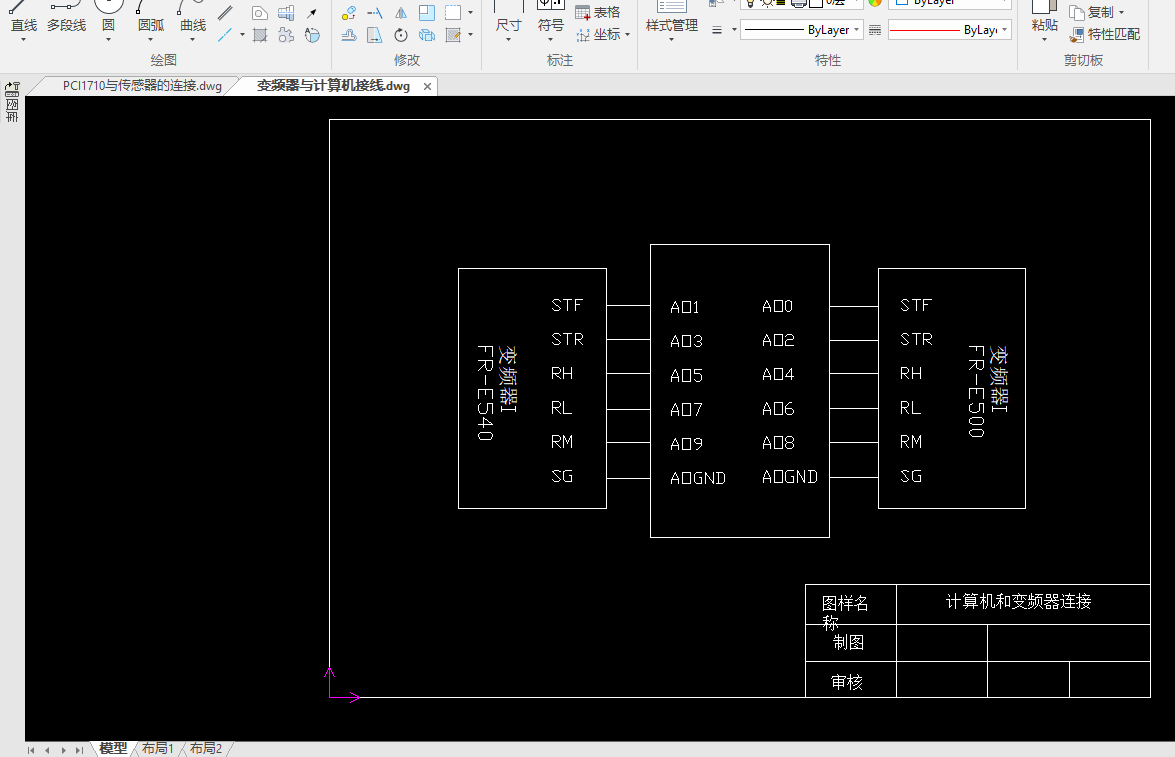
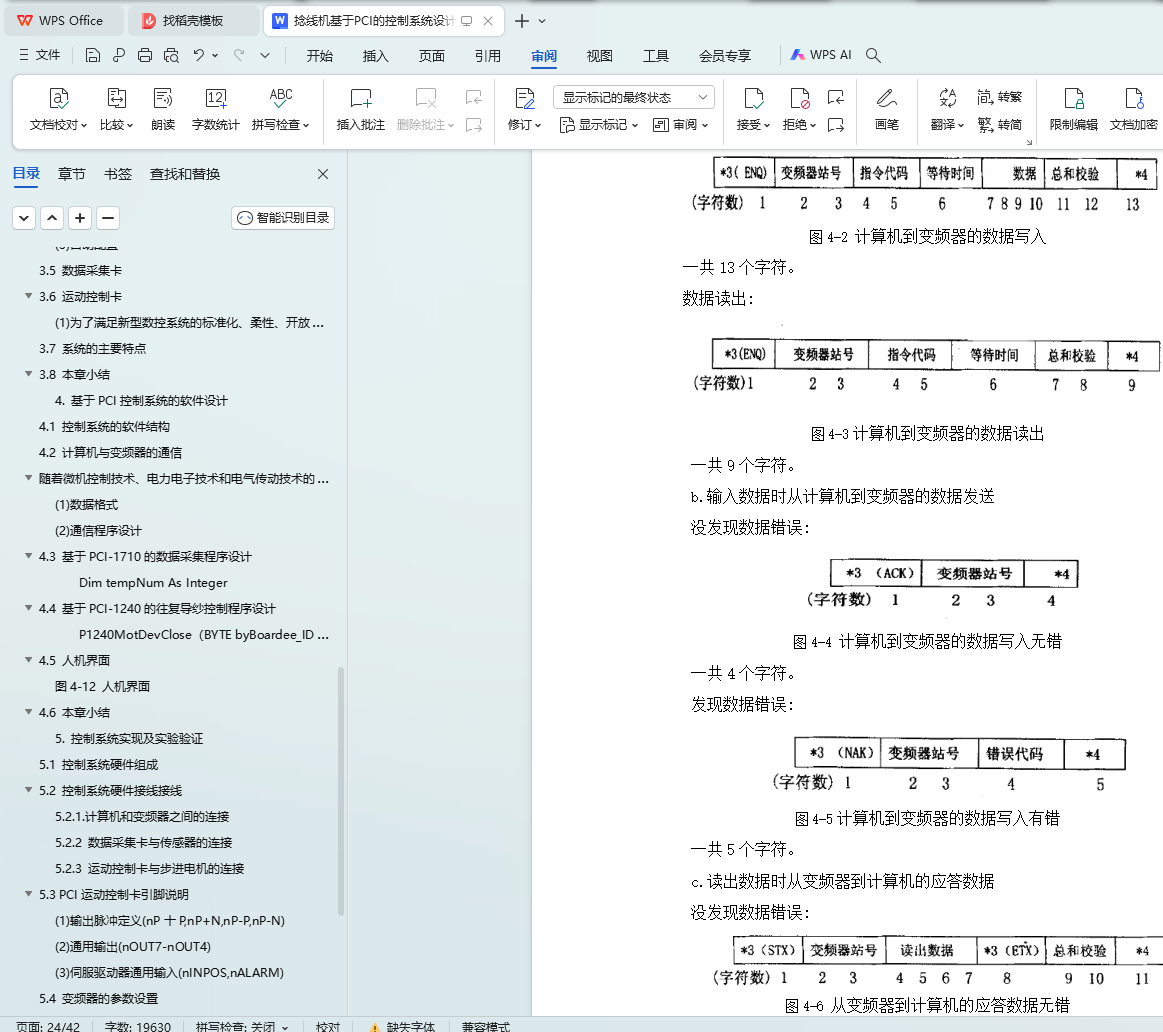
4.2 计算机与变频器的通信…………..........................………………………17
4.3 基于PCI-1710的数据采集程序设计…………………………………21
4.4 基于PCI-1240的往复导纱控制程序设计……………………………23
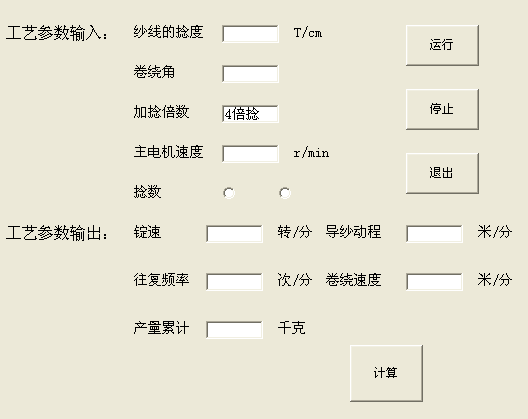
4.5 人机界面…………………………………………………..…………………25
4.6 本章小结……………………………………………………………………26
5. 系统实验验证…………………………………………….…………………27
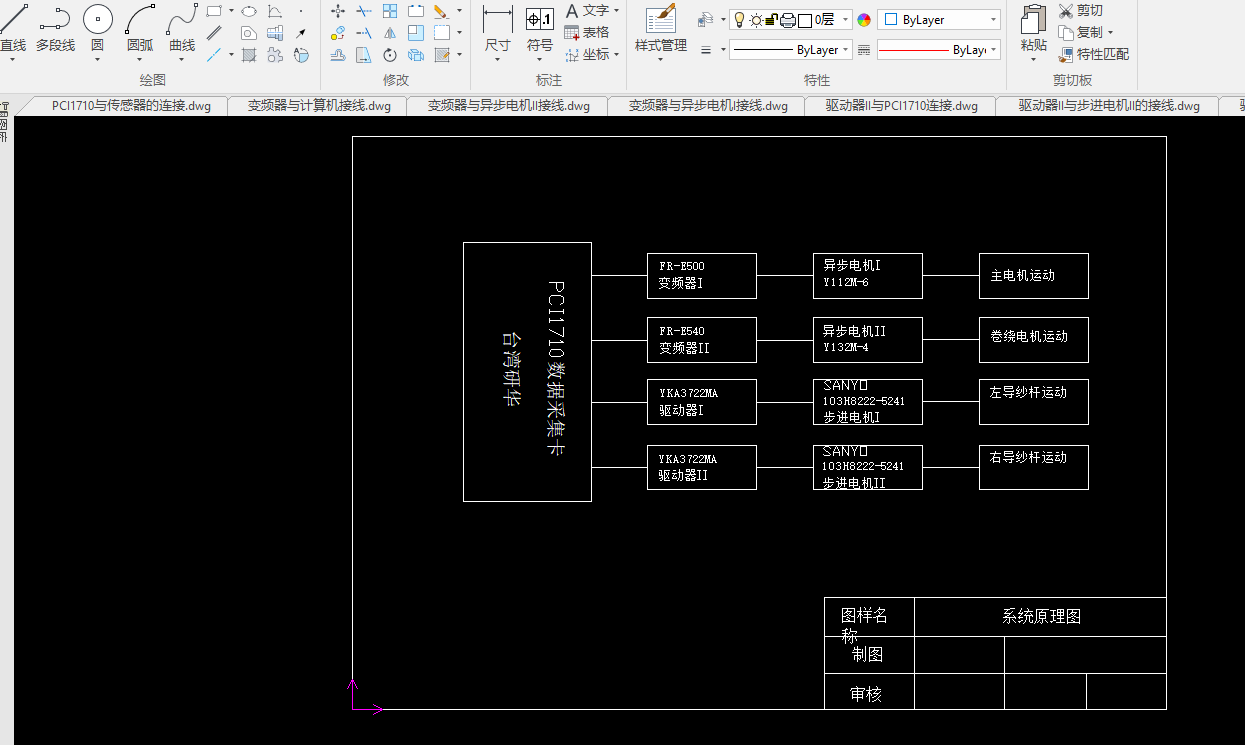
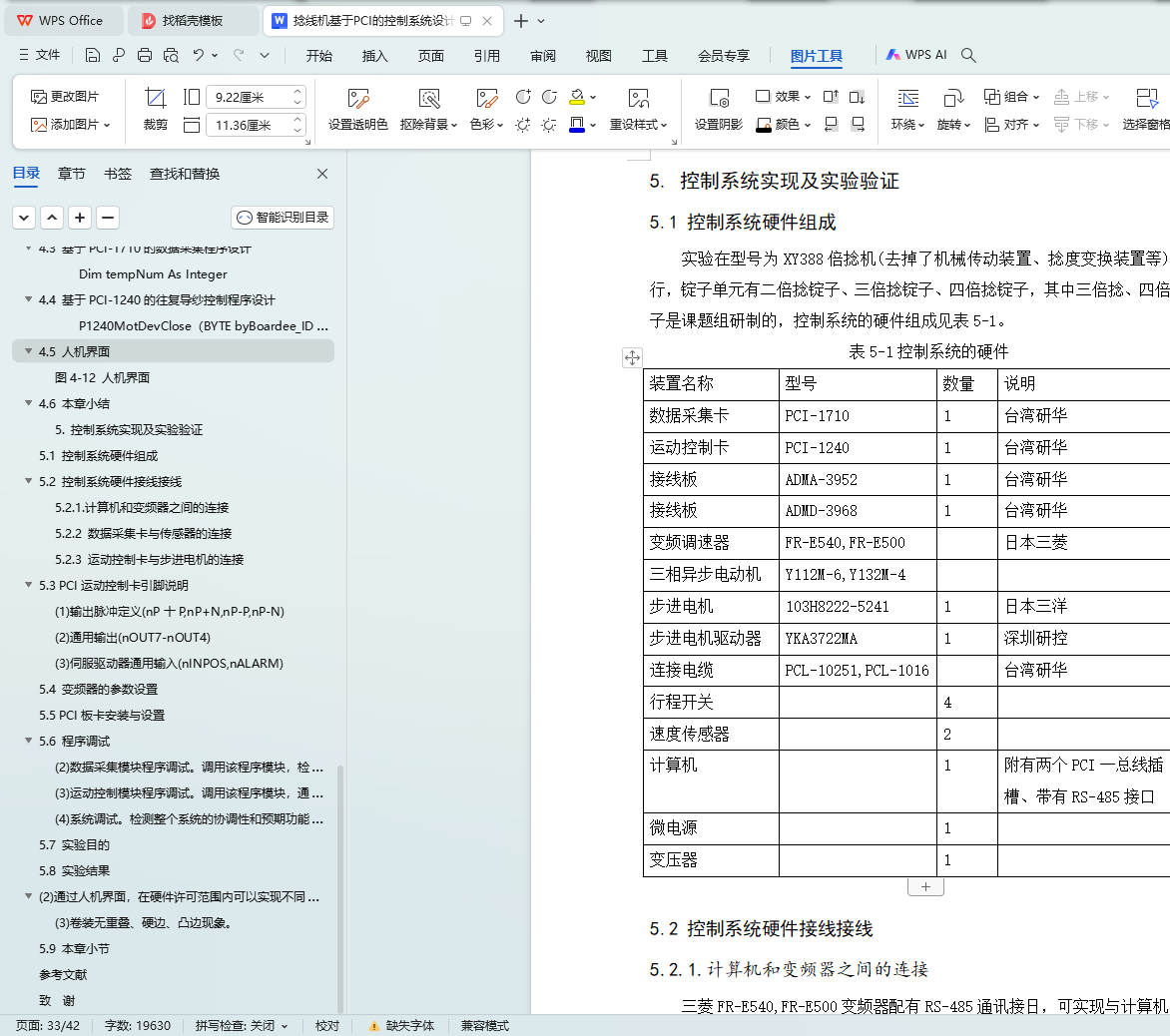
5.1 控制系统硬件组成……………….…………………………..……………27
5.2 控制系统硬件接线接线……………………..……………………………27
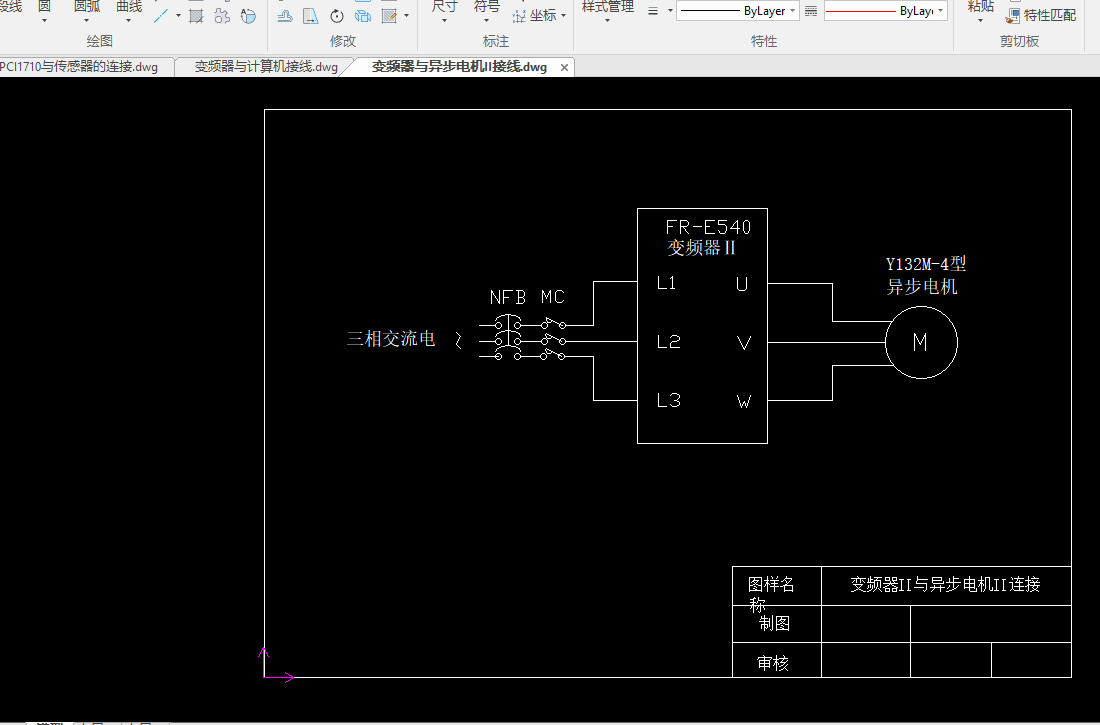
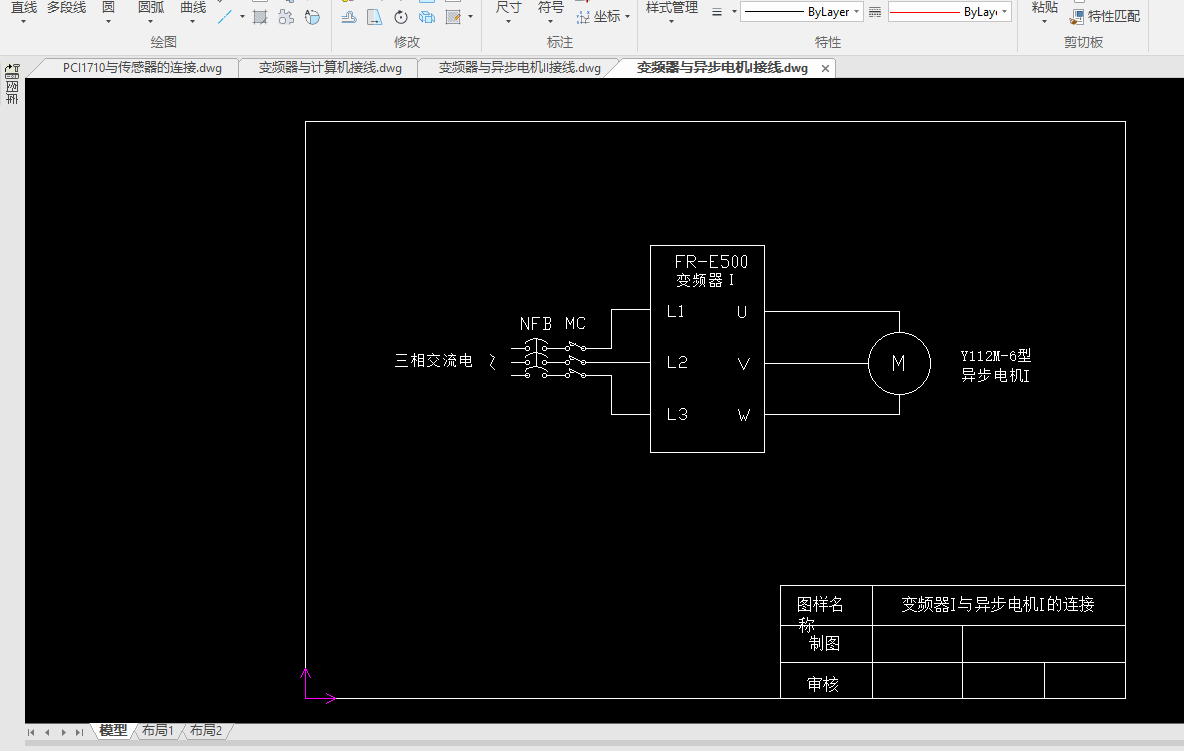
5.2.1 计算机和变频器之间的连接……………………..……..……………27
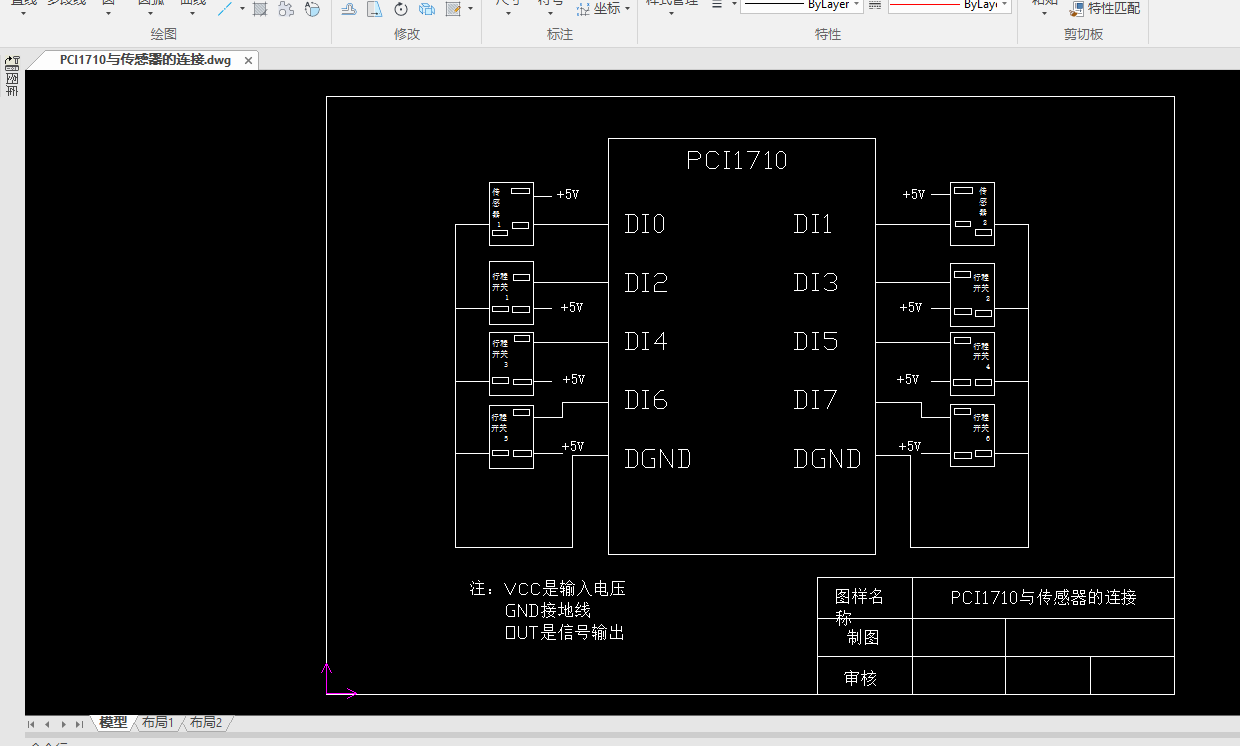
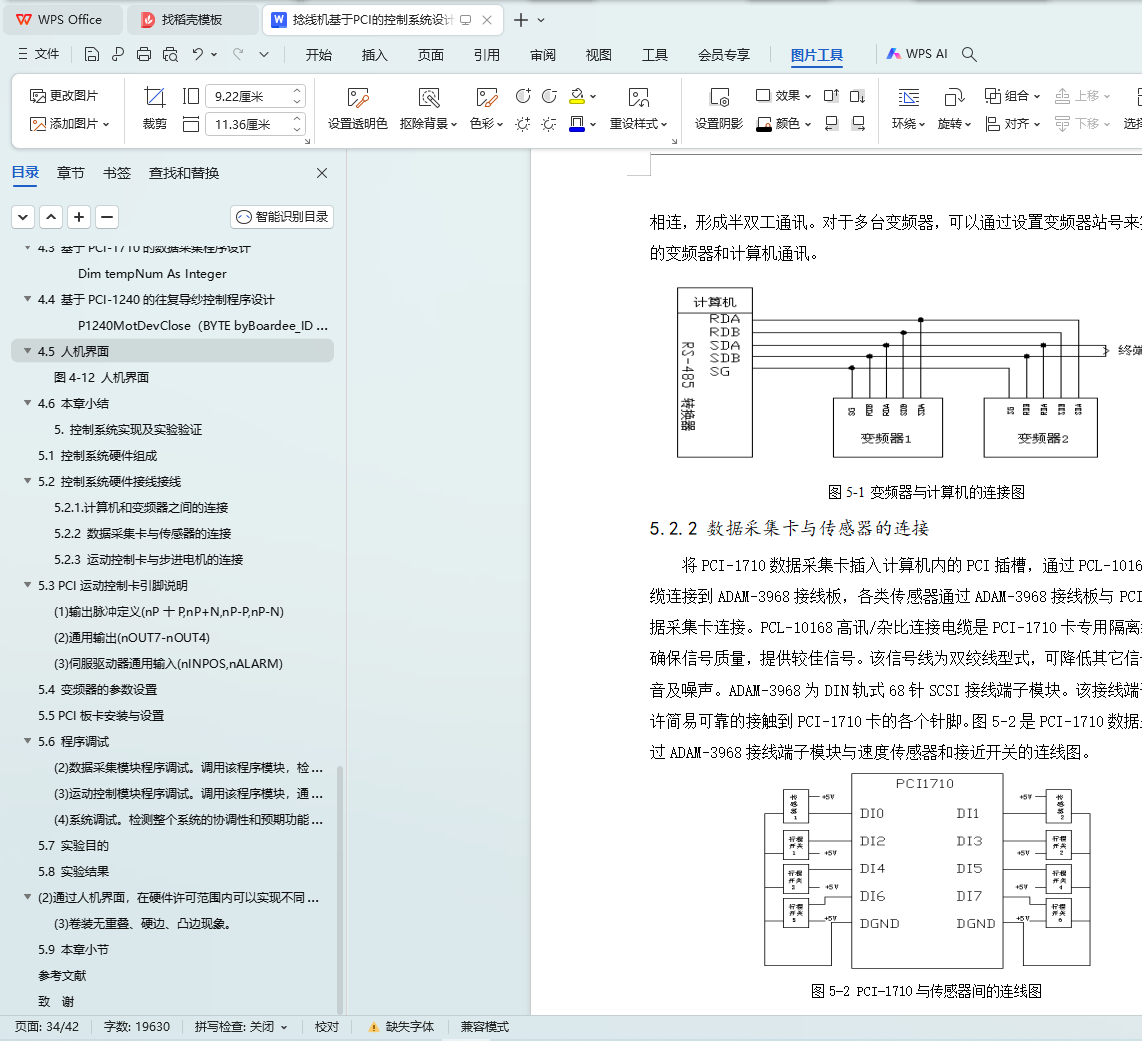
5.2.2 数据采集卡与传感器的连接...………………………….……………28
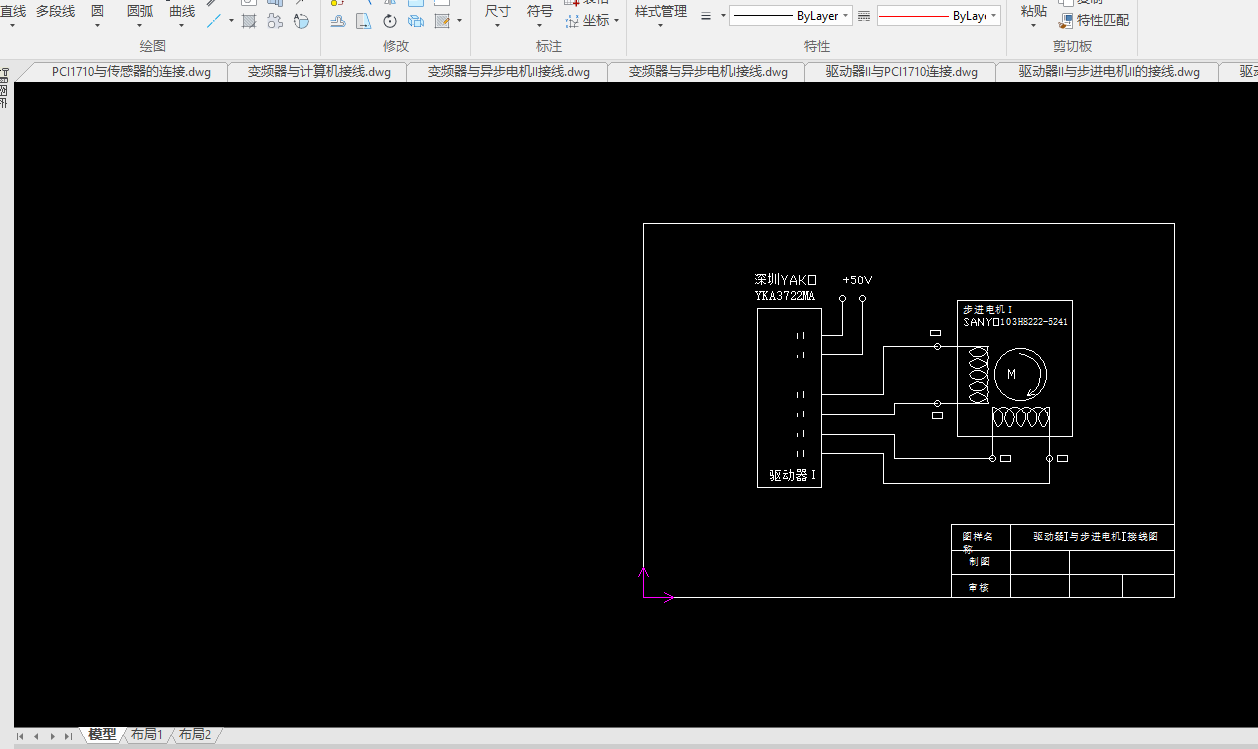
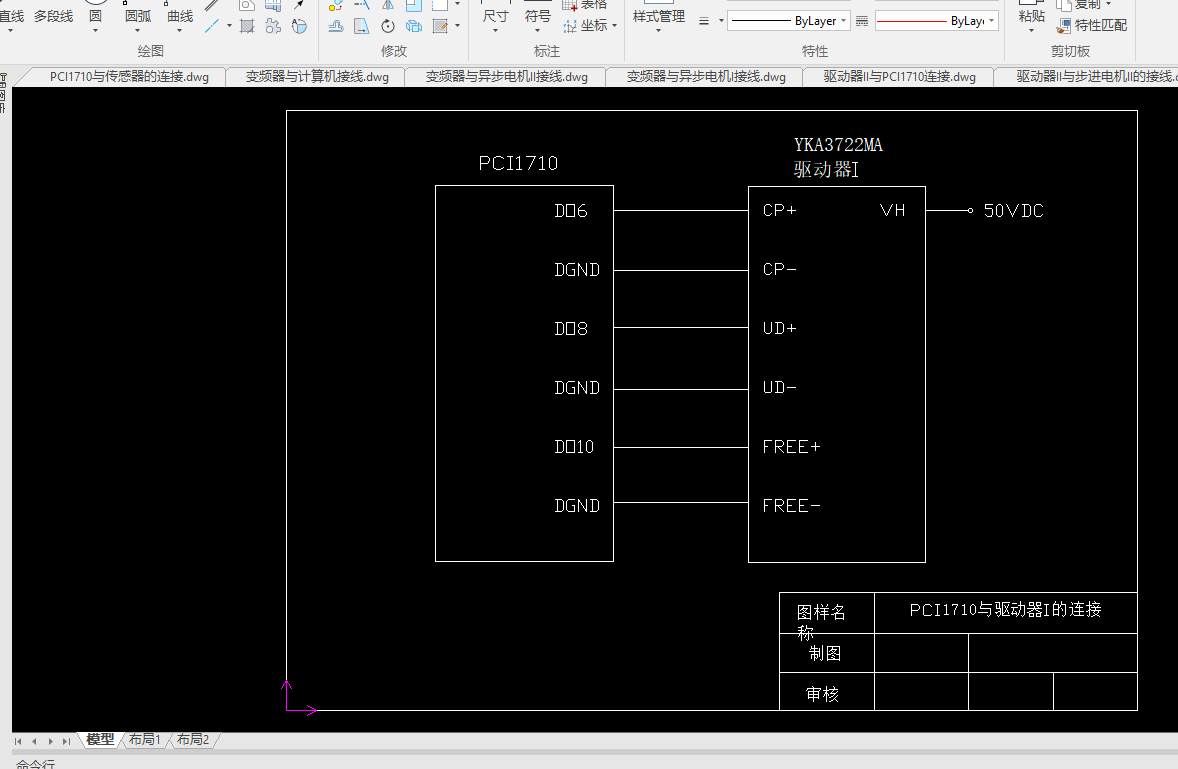
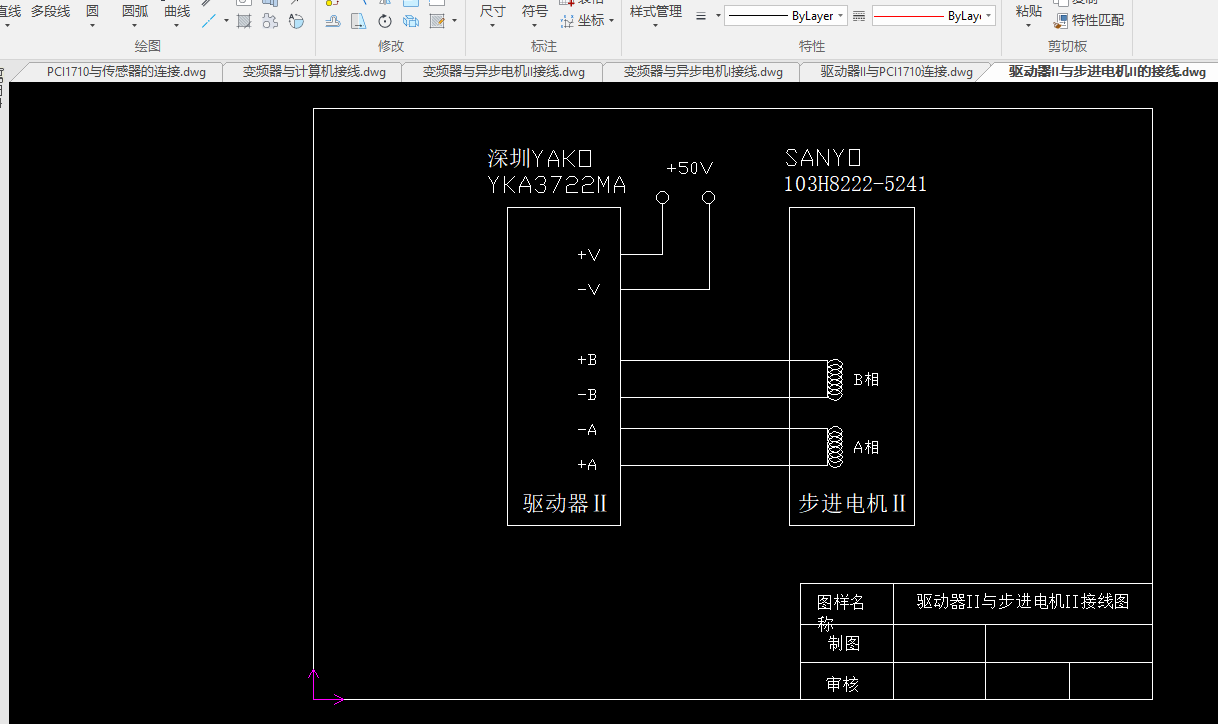
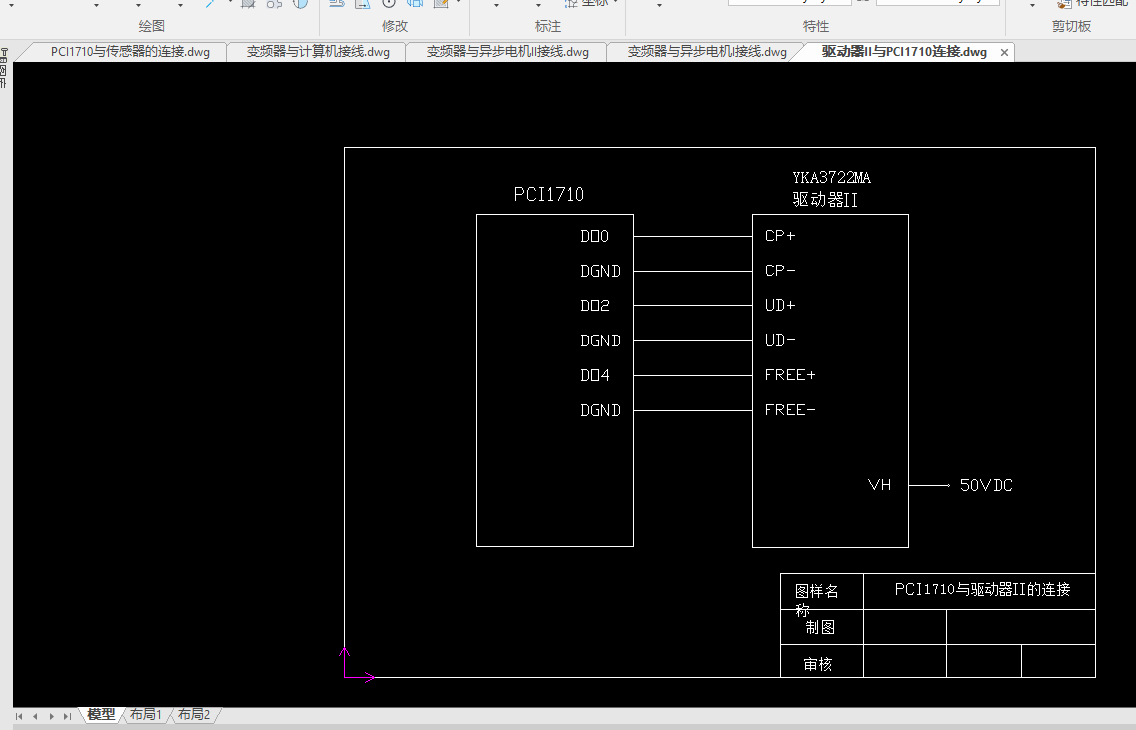
5.2.3 运动控制卡与步进电机的连接…………………..……….…………28
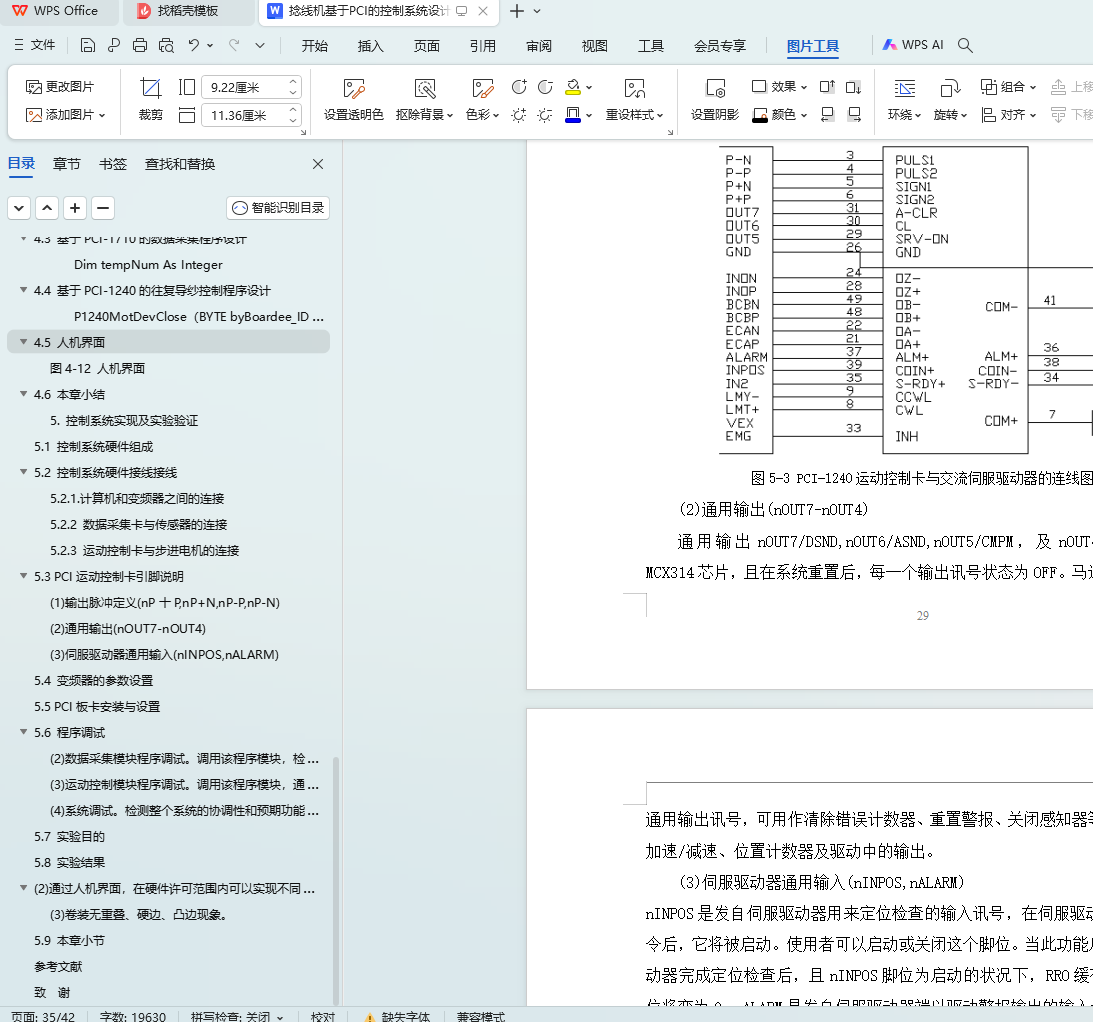
5.3 PCI运动控制卡引脚说明………………………..…………..……………29
5.4 变频器的参数设置……………………………..…………..…...…………30
5.5 PCI板卡安装与设置………………………………………………………31
5.6 程序调试……………………….…………..…………………………...……31
5.7 实验目的……………………….…………..…………………………...……32
5.8 实验结果……………………….…………..…………………………...……32
5.9 本章小节……………………….…………..…………………………...……32
6. 设计总结…………………….…………..………..…………..………...……33
参考文献…………………………………………………………….…………….34
外文资料………………………………..…………………………………………36
中文翻译…………………………..……………………………..………………..47
致谢…………………………………………………………………………………55