一种分拣机器人机械臂结构设计
摘 要
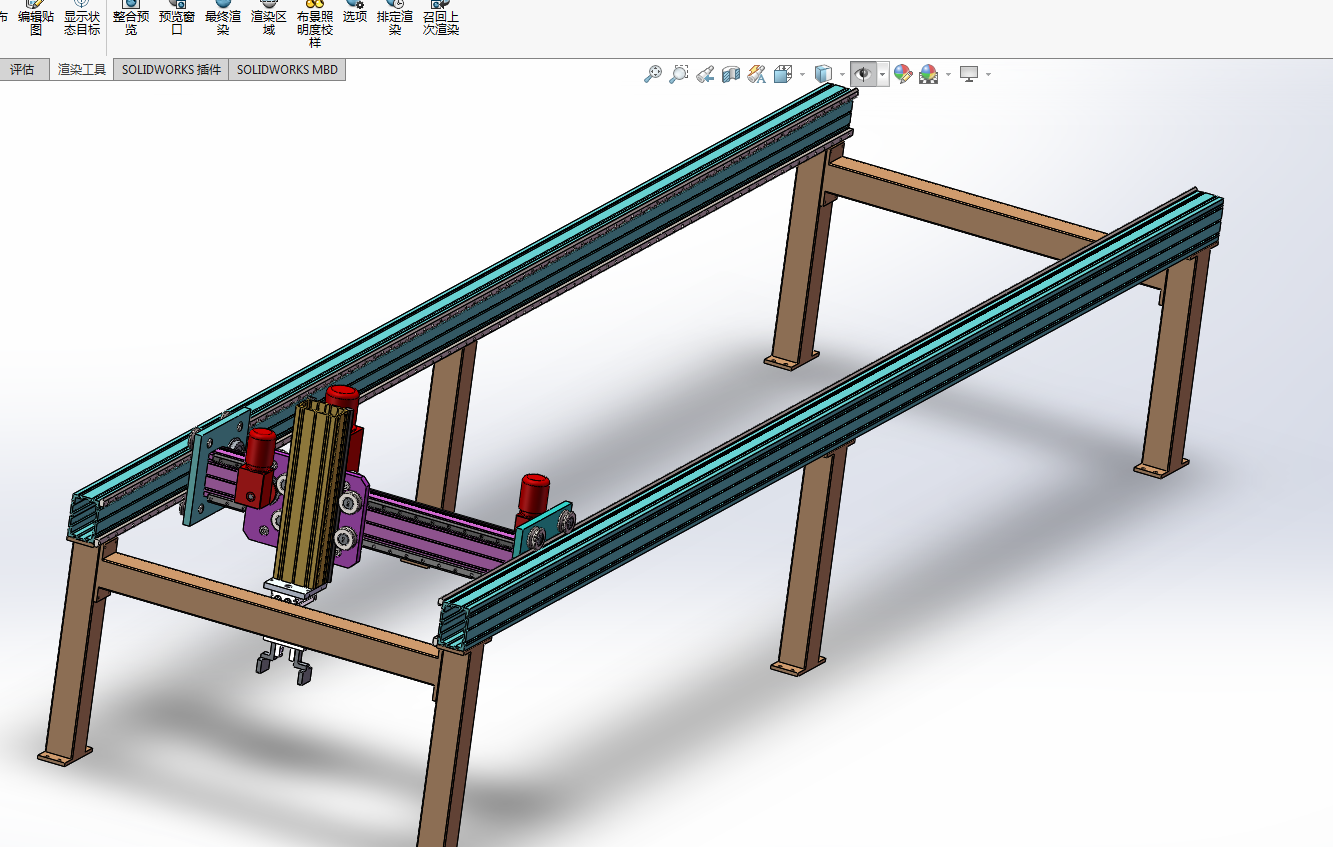
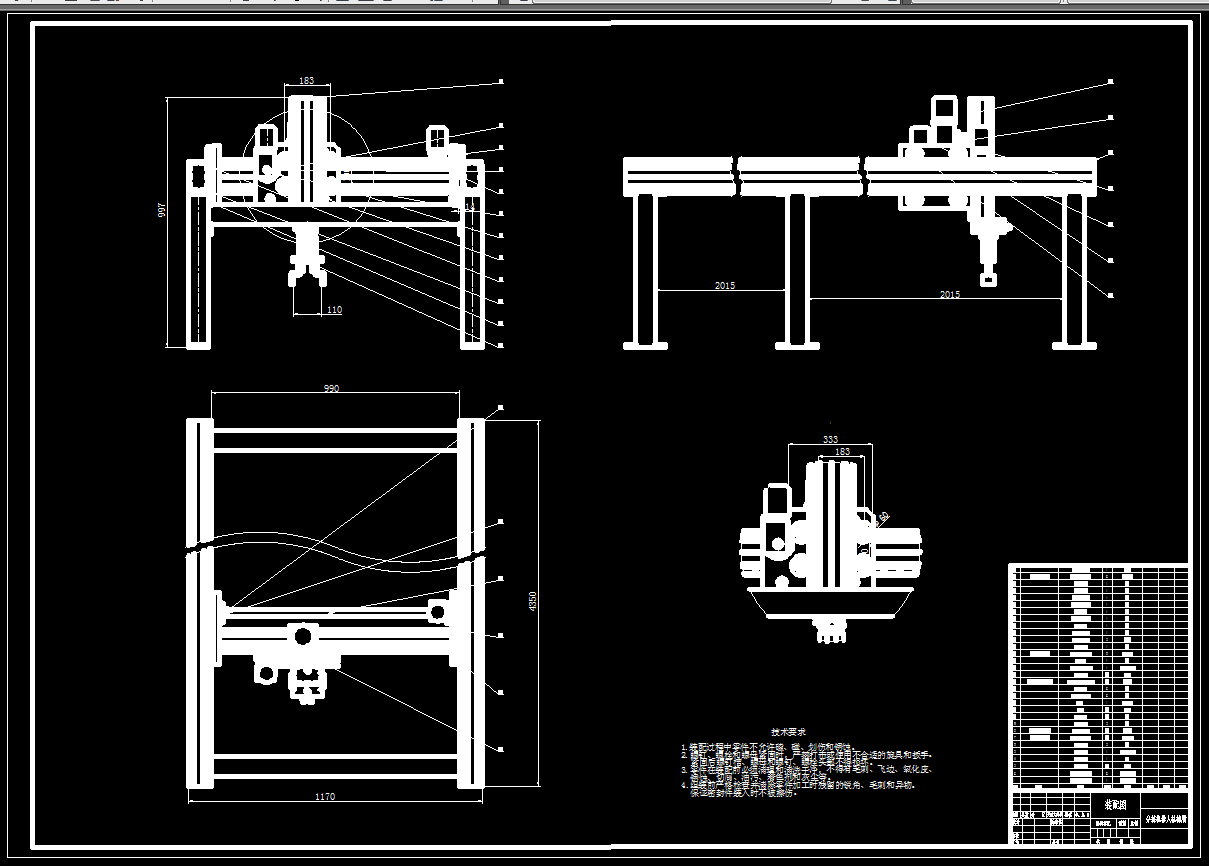
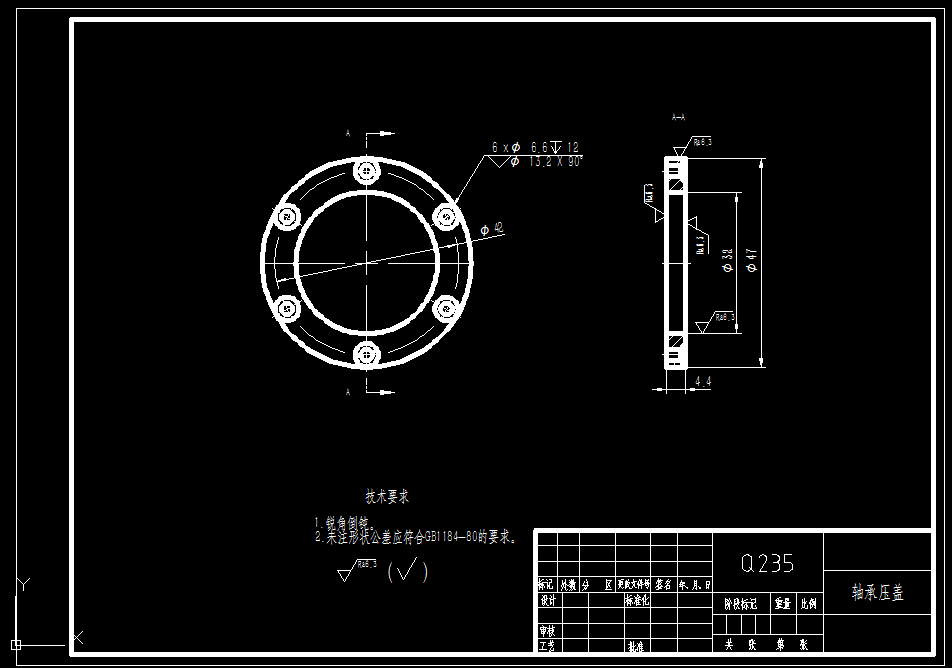
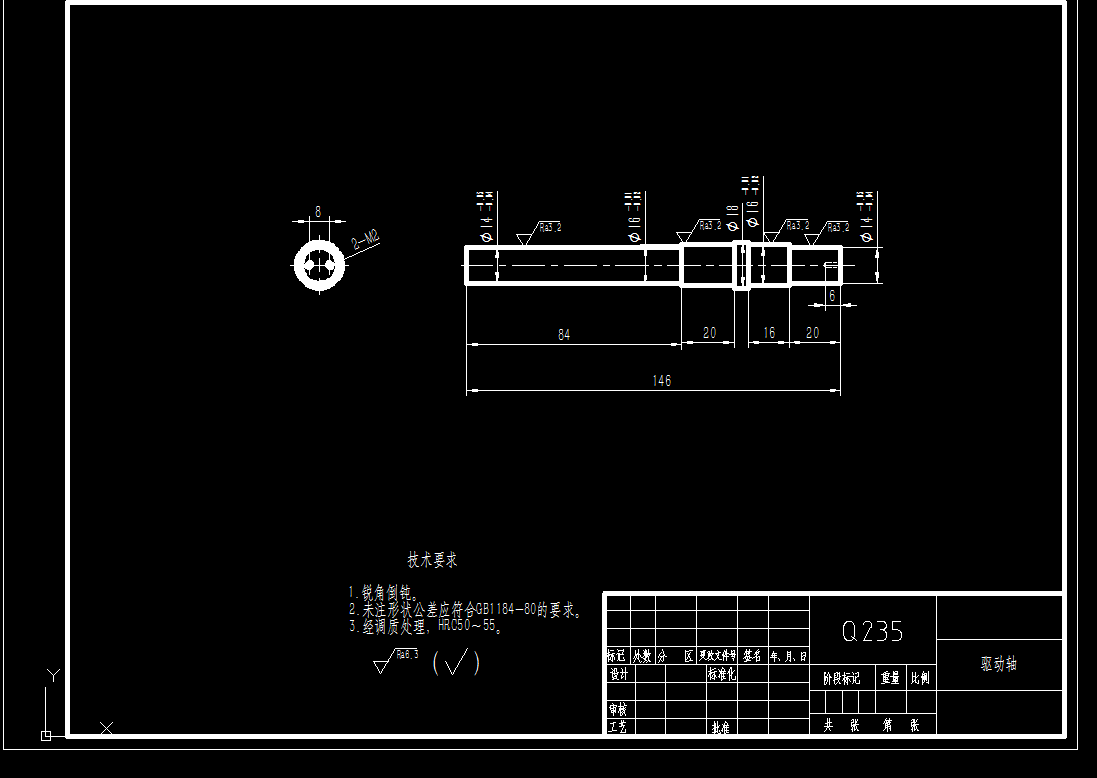
本课题主要研究分拣机器人的主体结构,该分拣机器人的行程比较大,强度要求比较严格。分拣机器人机械臂可以实现三个方向上的移动,抓取部分采用标准的SMC气爪进行零件的抓取,然后进行分拣。在移栽过程中如果需要旋转操作,可通过程序启动旋转气缸旋转设定角度。设计主要内容是通过SolidWorks软件完成对机械臂的结构设计,零件三维建模之后,将所有零件装配成一个机械臂的整体。通过将装配体转化成二维图纸,通过CAD的形式展现出来,并包含部分主要零件的零件图。文中对其主要结构的结构形式以及轮子的样式设计,轴承的选取以及轴上键的校核都进行了详细的阐述。
关键词:分拣机器人;机械臂;SolidWorks
Structure design of mechanical
arm of sorting robot
Abstract
This paper mainly studies the main structure of the sorting robot, which has a large travel and strict strength requirements. The mechanical arm of the sorting robot can move in three directions. The grabbing part uses the standard SMC air claw to grab the parts and then sort them. If the rotation operation is needed during the transplanting process, the rotation setting angle of the rotation cylinder can be started through the program. The main content of the design is to complete the structural design of the manipulator through SolidWorks software. After the 3D modeling of parts, all parts are assembled into a whole manipulator. The assembly body is transformed into two-dimensional drawings, which are displayed in the form of CAD and include the part drawings of some main parts. In this paper, the main structure, the design of wheel, the selection of bearing and the check of the key on the shaft are described in detail.
Key words:Sorting robot; mechanical arm; SolidWorks
目 录
第1章 绪论
1.1 研究背景
1.2 研究意义
1.3 国内外研究现状
1.4 主要研究内容及方法
第2章 龙门机器人自动分拣系统总体方案设计
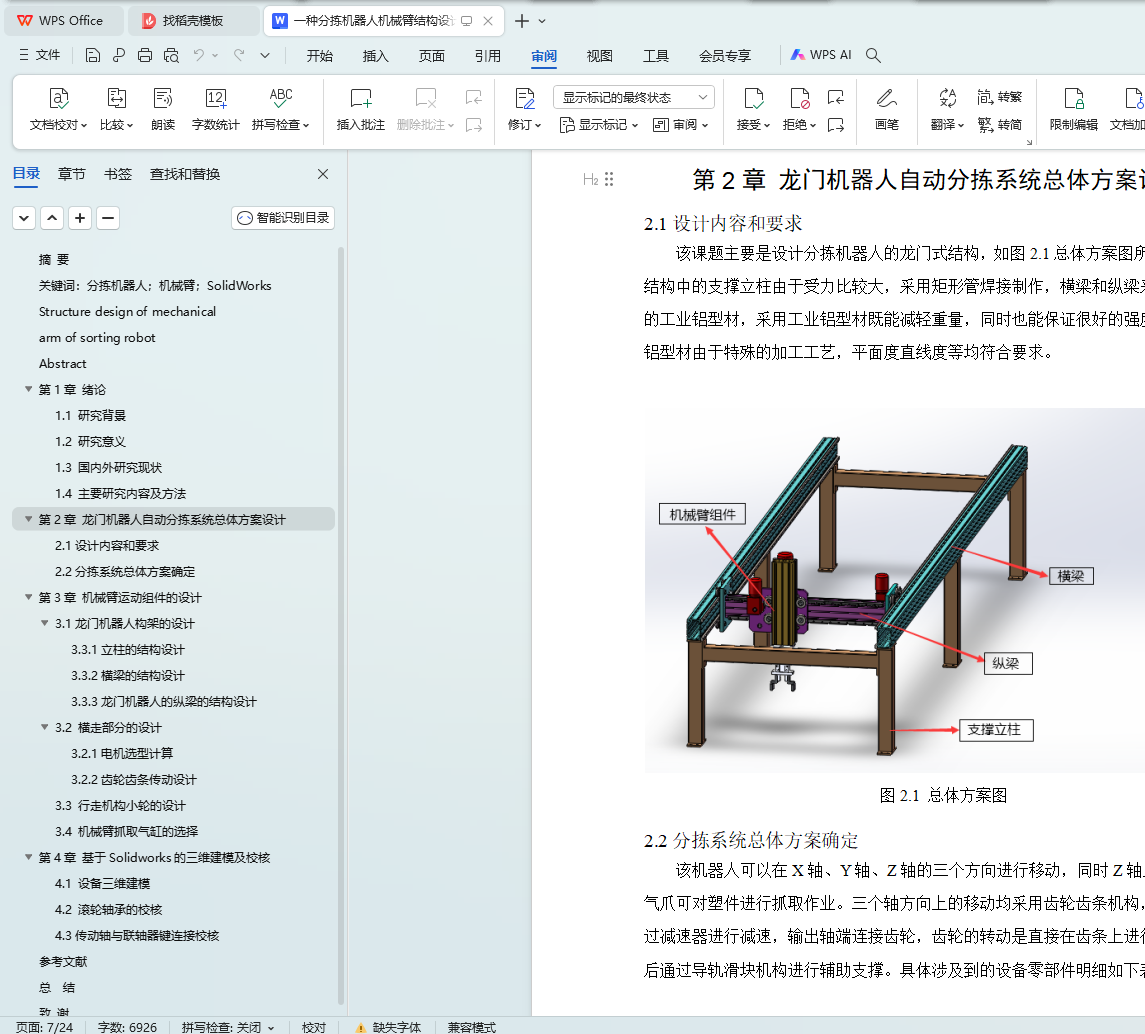
2.1设计内容和要求
2.2分拣系统总体方案确定
第3章 机械臂运动组件的设计
3.1龙门机器人构架的设计
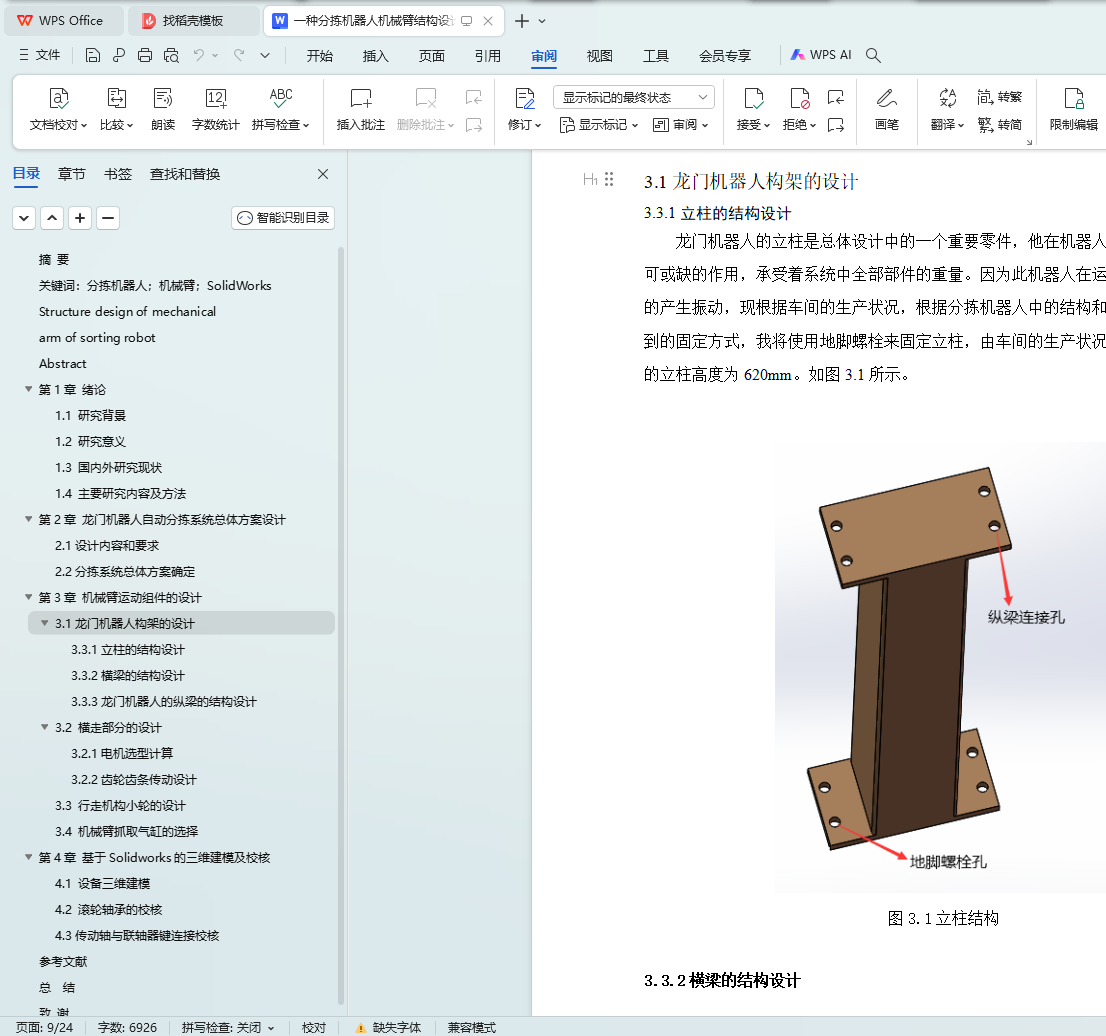
3.3.1立柱的结构设计
3.3.2横梁的结构设计
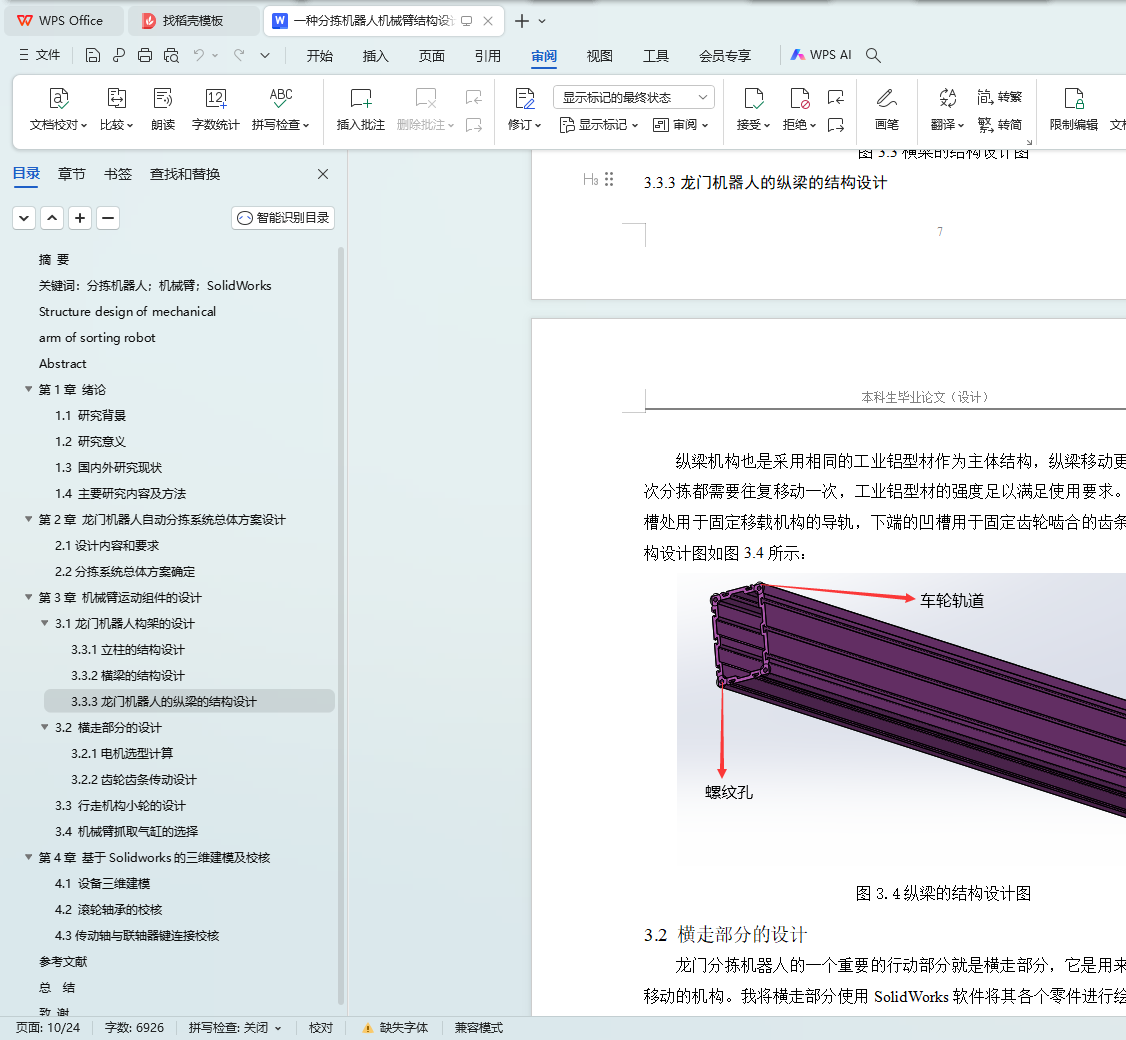
3.3.3龙门机器人的纵梁的结构设计
3.2 横走部分的设计
3.2.1电机选型计算
3.2.2齿轮齿条传动设计
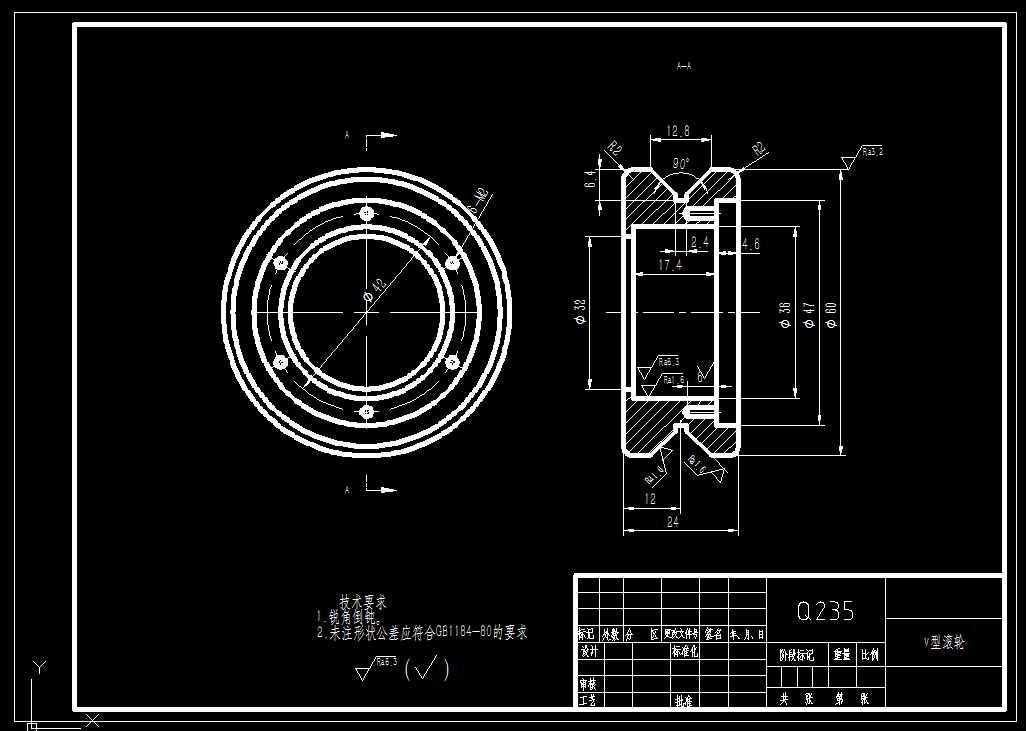
3.3 行走机构小轮的设计
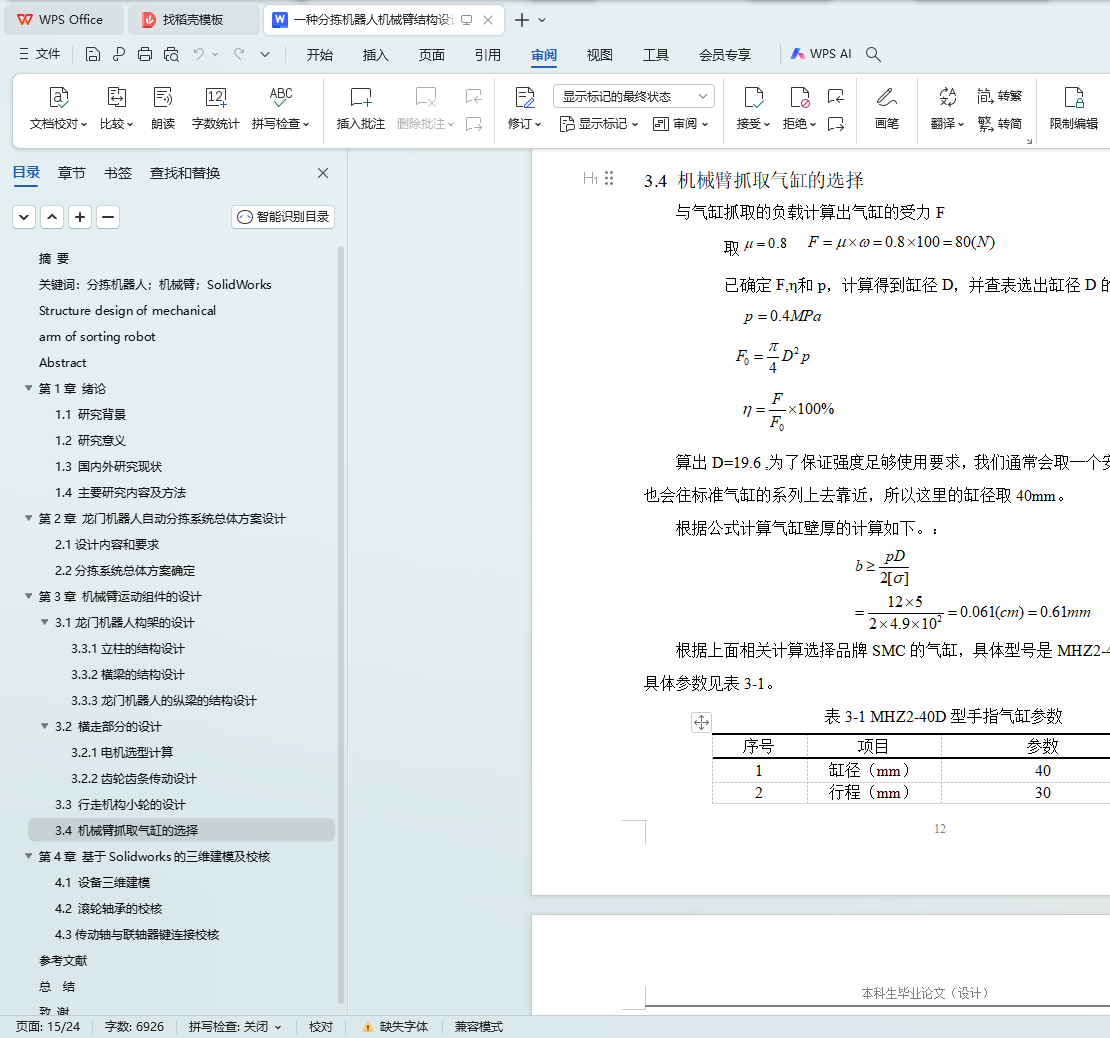
3.4 机械臂抓取气缸的选择
第4章 基于Solidworks的三维建模及校核
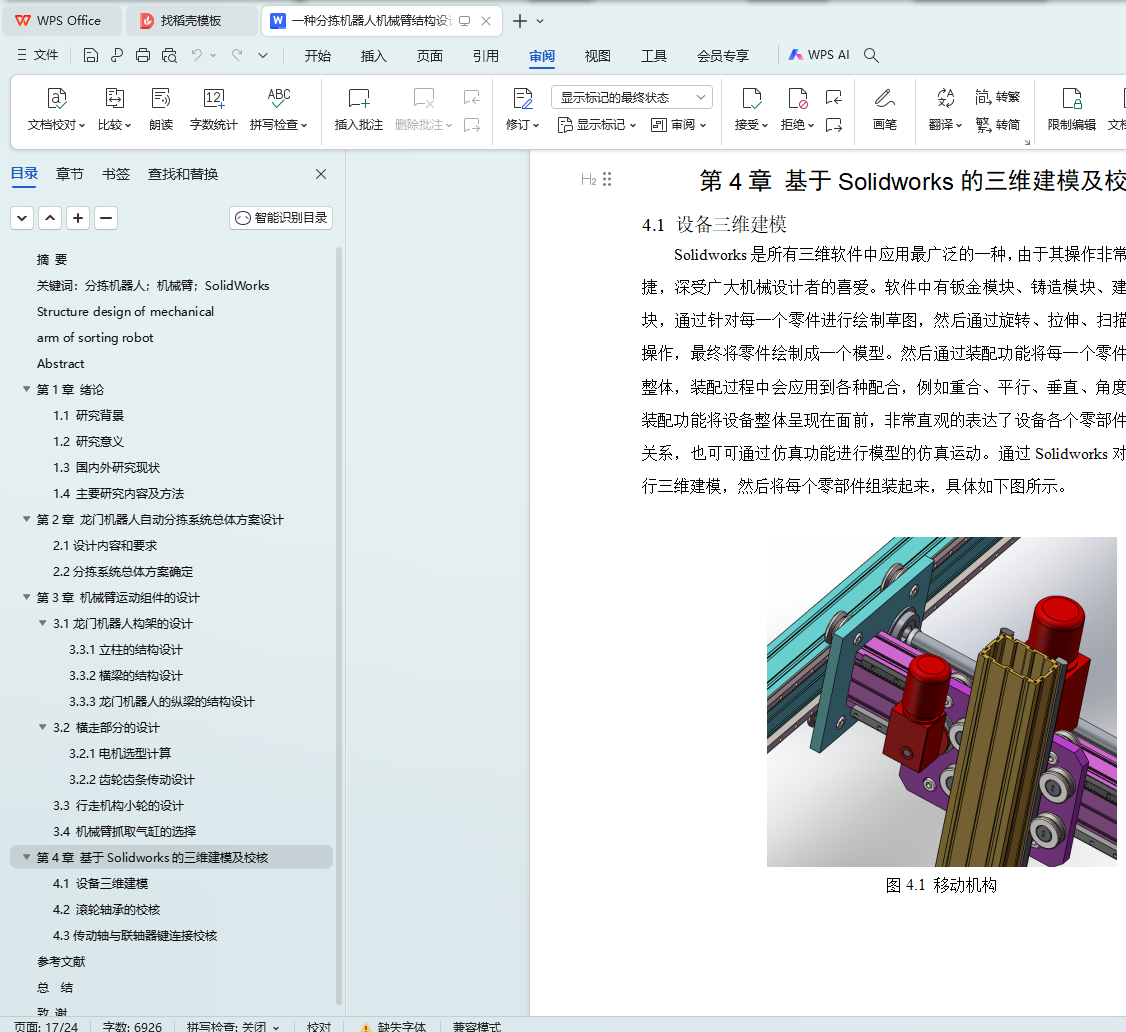
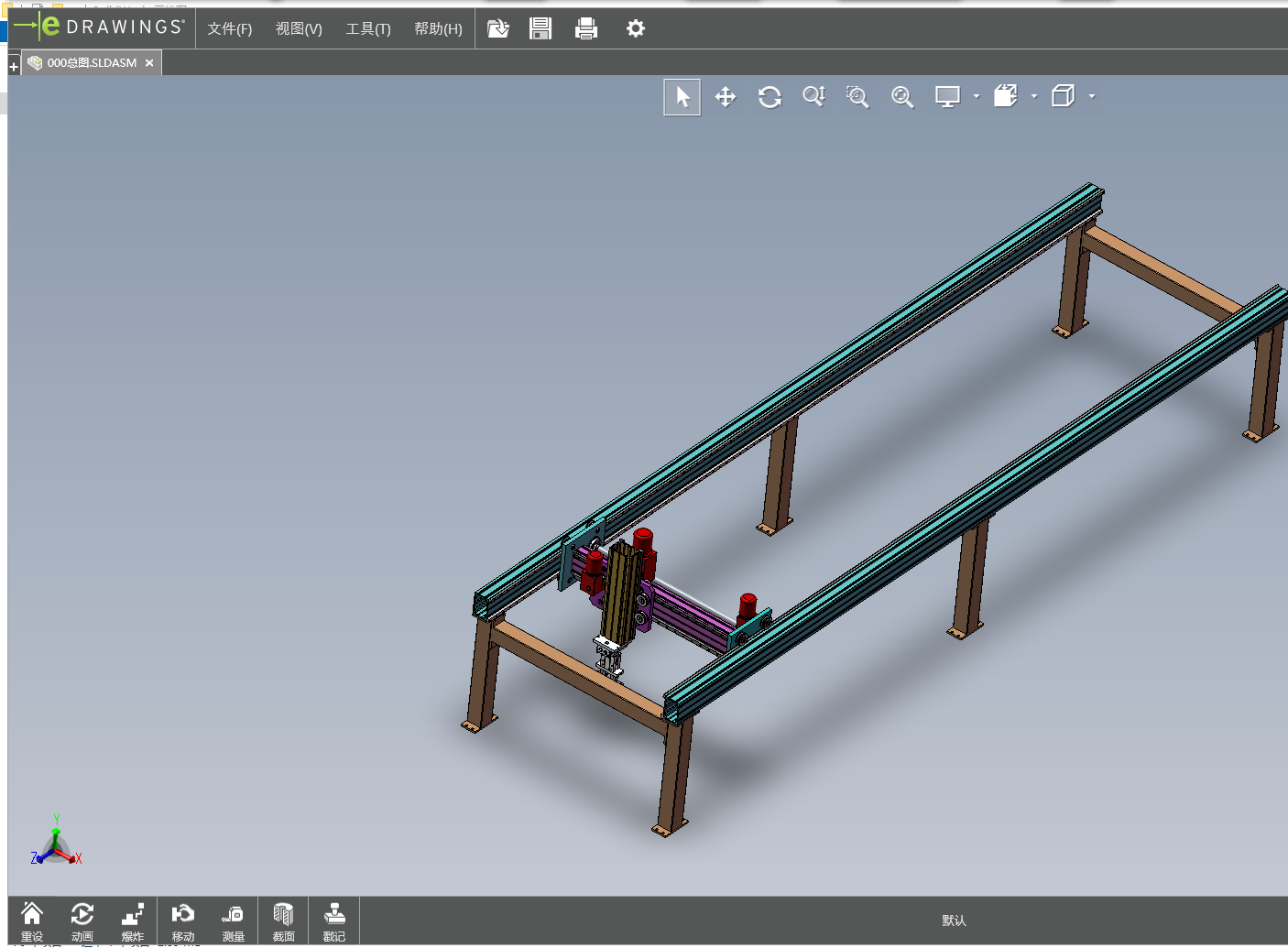
4.1 设备三维建模
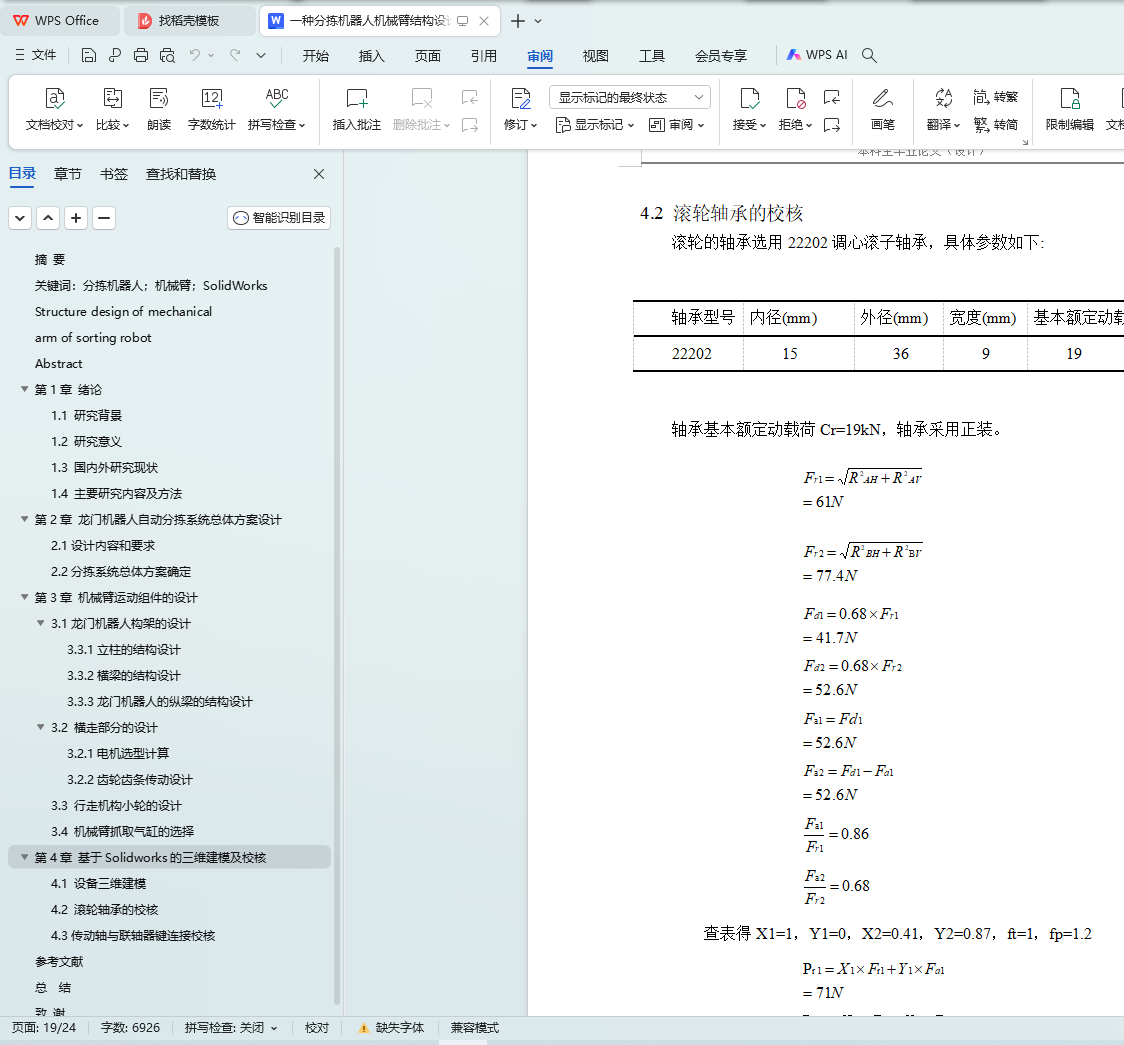
4.2 滚轮轴承的校核
4.3传动轴与联轴器键连接校核
参考文献
总 结
致 谢