基于RobotStudio的ABB机器人轨迹规划研究与仿真
一、背景及意义
本研究不仅提高了机器人的工作效率,为机器人的编程提供了数据支持,而且为操作机器人提供了理论指导。此外,本研究还为其他类似机器人的轨迹规划提供了参考和借鉴。通过深入探讨机器人的轨迹规划,我们期望能够推动相关领域的发展和进步,为未来的工业自动化技术做出贡献。
二、课题研究现状和发展趋势
国内在ABB机器人技术引进方面做了大量工作,不仅引进了先进的机器人产品,还引进了相关的技术和服务。在此基础上,国内研究者开始关注机器人的轨迹规划技术创新,致力于提高机器人的工作效率和精度。
国外在ABB机器人轨迹规划方面的研究更加注重与实际应用的结合。通过与产业的紧密合作,将研究成果应用于实际生产中,不断优化和完善轨迹规划技术。同时,也注重与国际标准化组织的合作,推动机器人技术的标准化和规范化发展。
三、研究主要内容
本文针对ABB-IRB 1600机器人进行深入的轨迹规划研究。在了解其基本结构的基础上,结合坐标变换、运动学和轨迹规划的理论,规划了机器人末端执行器的运动轨迹。利用RobotStudio软件,模拟了该轨迹规划过程,并对运动学进行了分析。通过D-H方法建立了机器人的连杆坐标系和变换矩阵,计算了工作空间。实验验证了规划的合理性和可行性,提高了机器人的工作效率,为机器人的编程提供了数据支持,并为操作机器人提供了理论指导。
四、基于栅格法的路径规划研究
1. 基于几何构造的路径规划方法
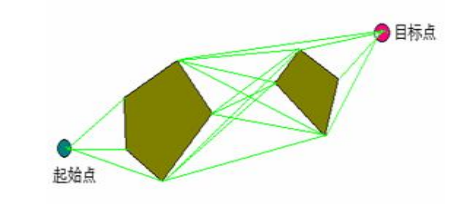
要求顺利从起始点运动到目标点,并能在成功避开障碍物的前提下,选择出最短路径。我们可以连接起始点和障碍物的顶点,再连接障碍物的顶点和目标点,障碍物的不同顶点对应了不同的路径,从这些有限的路径中选出的最短路径就是我们要求的最优路径。
2.基于神经网络的路径规划方法
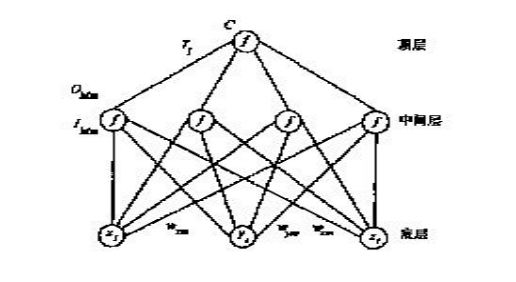
首先按照上图的方法,转化为优化问题。然后用神经网络表示惩罚函数。最后根据E递减推导出相应的反向传播算法用于神经网络的训练。
3.基于人工势场的路径规划方法

障碍物对机器人施加排斥力,目标点对机器人施加吸引力,合力形成势场,机器人移动就像球从山上滚下来一样,机器人在合力作用下向目标点移动。
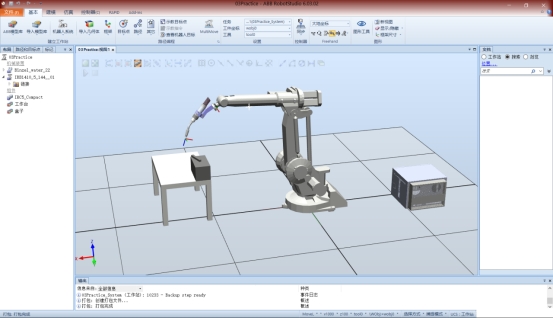
五、基于RobotStudio的实验仿真验证
本文在一个已经搭建好机械模型,同时 完成机器人系统的创建后的机器人运行路径的创建过程。初始时的界面如下:
1.工件坐标的创建


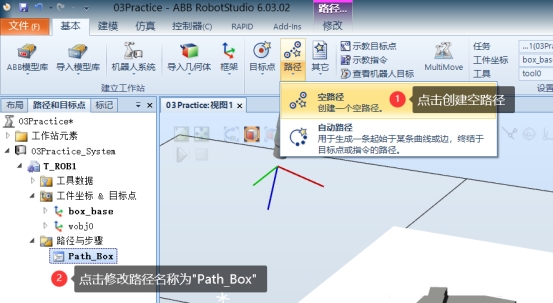
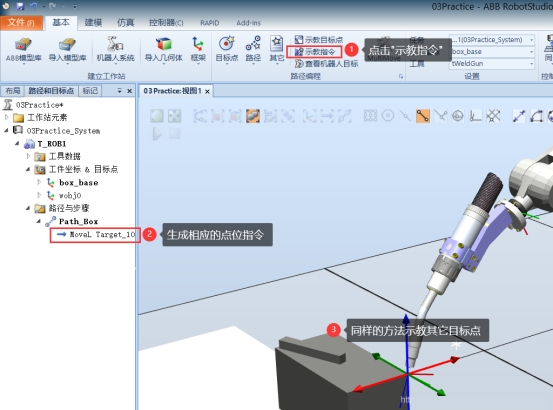
2.运行路径的创建
(1)首先创建一个空路径
(2)改变机器人的姿态,使工具移动到目标点进行示教。

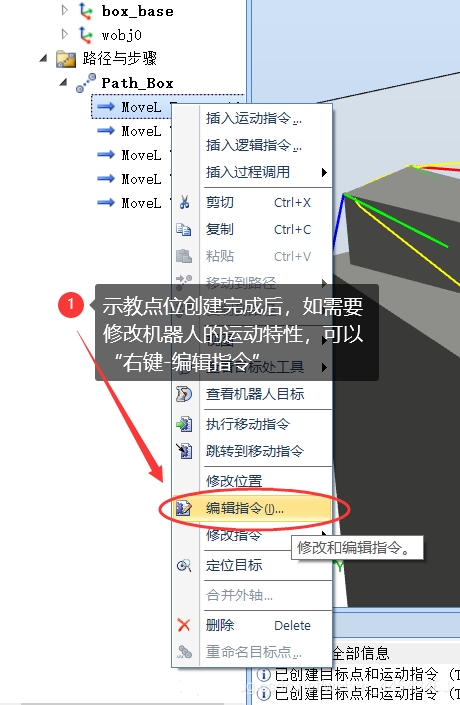

动作类型
Joint:机器人以点到点的形式到此点(不走直线,各轴自由运动)
Linear:机器人以直线运行方式从上一点运行到下一点
Conc
禁用:机器人会精确到达此点
启用:机器人会依据Zone的参数,略过此点
Speed:机器人的运动速度
Zone:启用Conc时,机器人掠过目标点所经过圆弧轨迹的半径
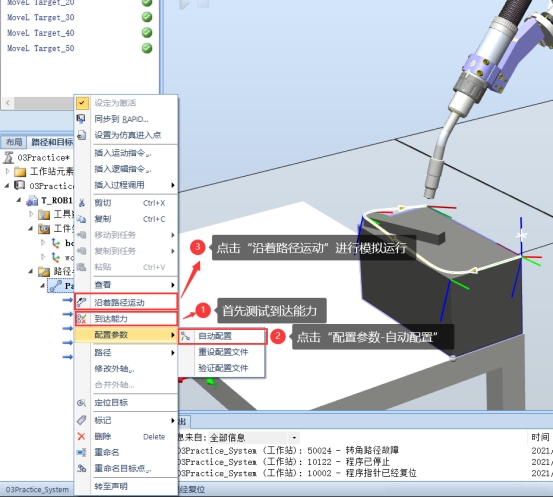
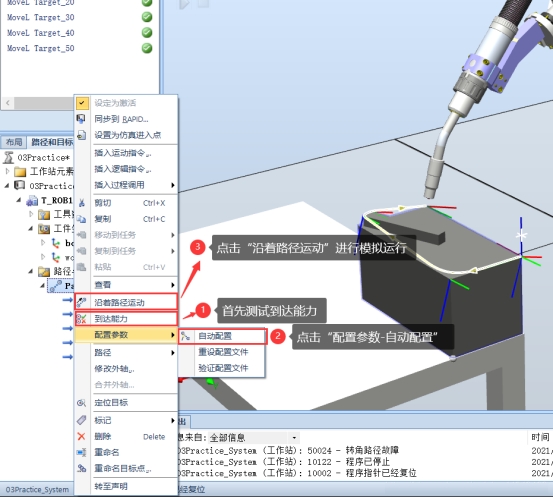
(3)测试到达能力并进行模拟运行
3.仿真与录像
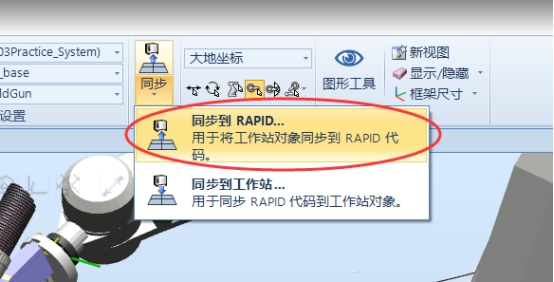
(1)将工作站同步到Rapid代码
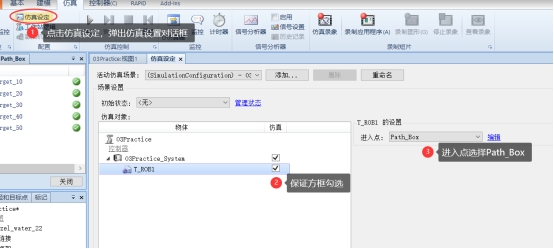
(2)进行仿真设定
(3)播放并录制保存仿真视频。(录制的视频默认保存在 我的电脑/视频 目录下)

