摘 要
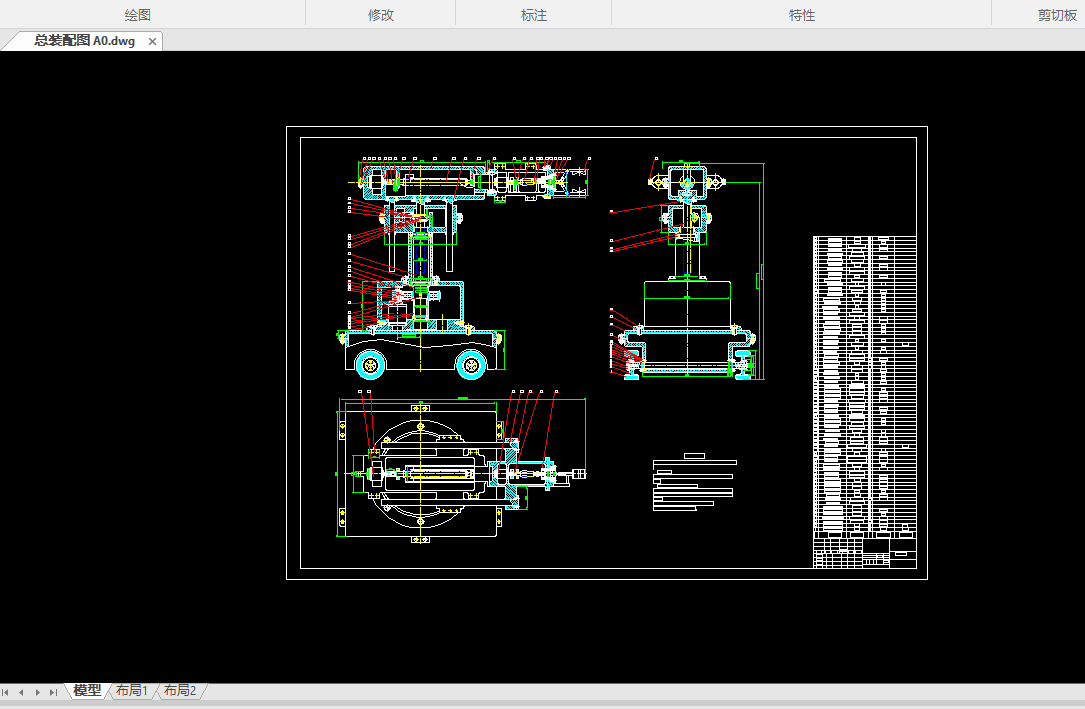
本文旨在探讨仓储物流移动机器人的结构设计。通过对仓库环境、需搬运货架大小的深入调研,确定了移动机器人的合适尺寸。基于货架搬运需求,设计了机器人的顶升方式及高度,确保机器人能够精确、快速、平稳地完成搬运工作,包括顶起货架、携带货架移动及放下货架。机器人具备直线行驶、转弯、上下坡等移动能力,同时集成识别货架和路线规划功能,配备了可见光摄像机、红外热成像仪及各种传感器。利用三维设计软件,对机器人各零部件进行三维建模,完成整机的虚拟装配、干涉检查与运动仿真,验证了结构设计的可行性。针对关键零部件进行了理论分析和设计计算,旨在减少磨损、延长使用寿命。最终设计的移动机器人机构满足了使用要求,数据准确,分析有理有据。本文还提供了移动机器人机构的二维和三维图,为仓储物流自动化提供了有效解决方案。
关键词:仓储物流;移动机器人;结构设计;顶升方式;三维建模;
ABSTRACT
This paper aims to discuss the structural design of warehousing and logistics mobile robot. Through the in-depth investigation of the warehouse environment and the size of the handling shelves, the appropriate size of the mobile robot is determined. Based on the demand of shelf handling, the lifting mode and height of the robot are designed to ensure that the robot can complete the handling work accurately, quickly and smoothly, including lifting up the shelves, carrying the shelves moving and putting down the shelves. The robot has the ability of moving in a straight line, turning, and going up and downhill. Meanwhile, the robot integrates shelf identification and route planning functions, and is equipped with visible light camera, infrared thermal imager and various sensors. Using 3 d design software, the 3 D modeling of the robot parts, completing the virtual assembly, interference inspection and motion simulation, and verifying the feasibility of structural design. Theoretical analysis and design calculation for key components to reduce wear and extend service life. The final design of the mobile robot mechanism meets the requirements of use, accurate data, and reasonable analysis. This paper also provides two-dimensional and three-dimensional maps of mobile robot institutions, which provides an effective solution for warehousing and logistics automation.
Key words: warehousing logistics; mobile robot; structure design; jacking mode; 3 D modeling;
目录
第一章 绪论
1.1 研究的背景与意义[1]
1.2 机器人的研究现状[4]
1.3机器人的发展趋势
1.4本文的主要研究内容
第二章 机器人总体方案设计
2.1 小型仓储物流移动机器人的功能
2.2 传感器系统[13]
2.3 移动载体
2.4 自由度与机器人的运作
2.5 控制方式的选择
2.6 小结
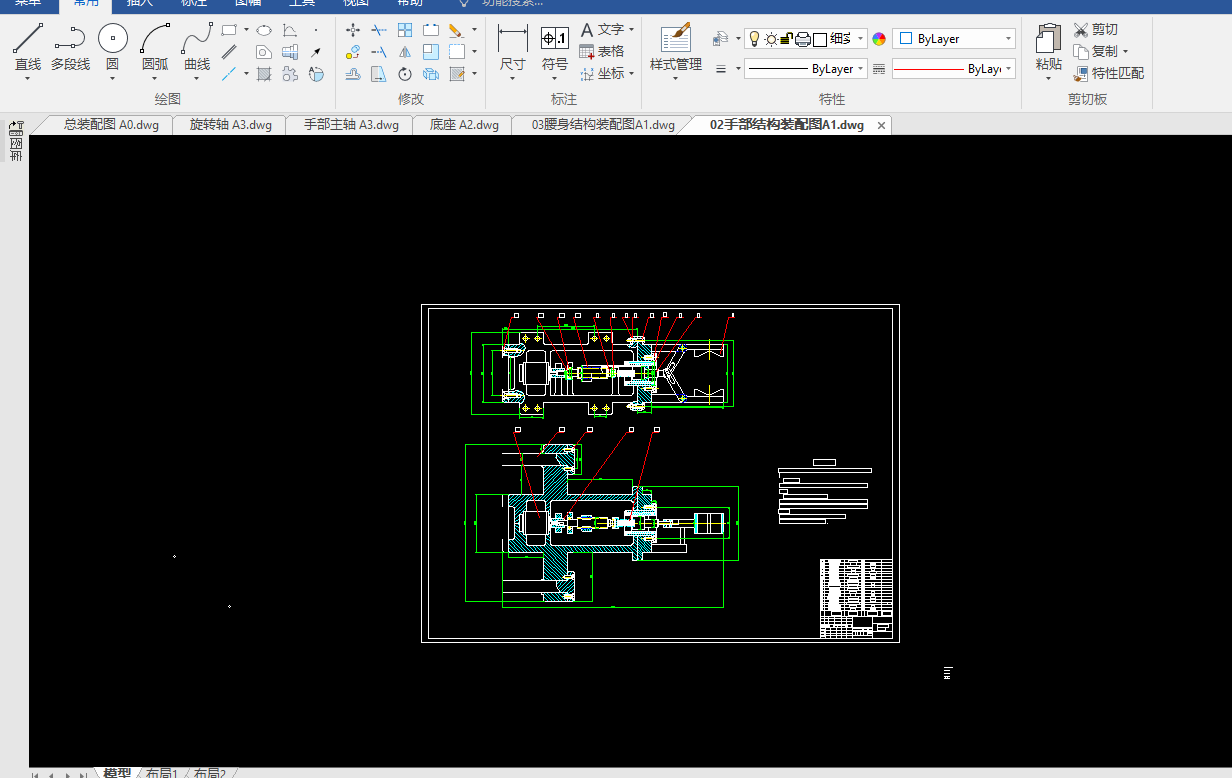
第三章 机器人的手部设计
3.1 手部的结构设计
3.1.1 概述
3.1.2 设计时应考虑的几个问题
3.1.3 手部夹紧力的计算
3.1.4 弹簧的计算
3.15 手部主轴的校核计算
3.2 驱动方式
3.2.1 手部电机选择原则
3.2.2 手部电机的选择
3.2.3 电机转速与夹紧力速度几何关系的确定
第四章 手臂的设计
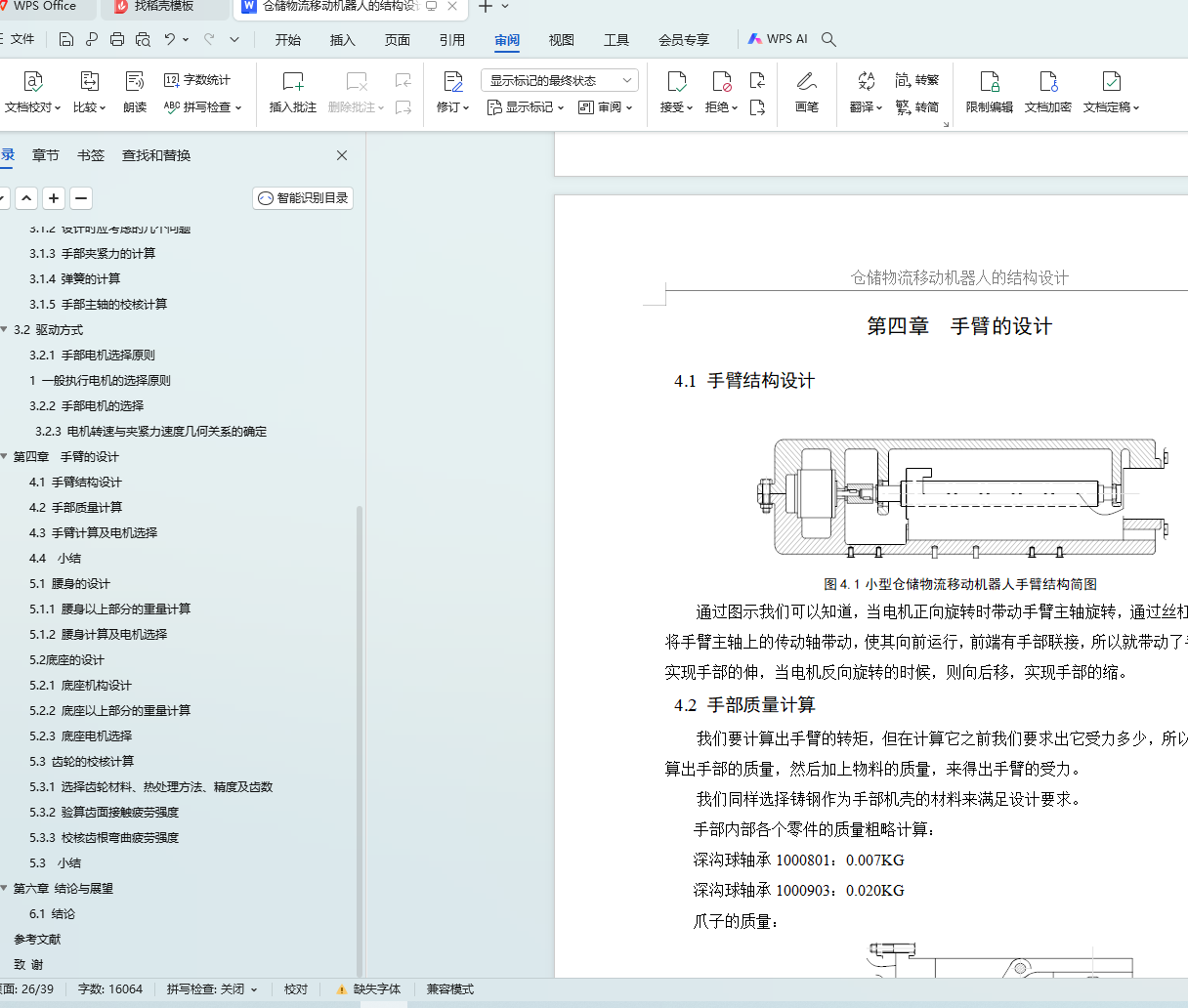
4.1 手臂结构设计
4.2 手部质量计算
4.3 手臂计算及电机选择
4.4 小结
第五章 腰身及底座的设计 26
5.1 腰身的设计
5.1.1 腰身以上部分的重量计算
5.1.2 腰身计算及电机选择
5.2底座的设计
5.2.1 底座机构设计
5.2.2 底座以上部分的重量计算
5.2.3 底座电机选择
5.3 齿轮的校核计算
5.3.1 选择齿轮材料、热处理方法、精度及齿数
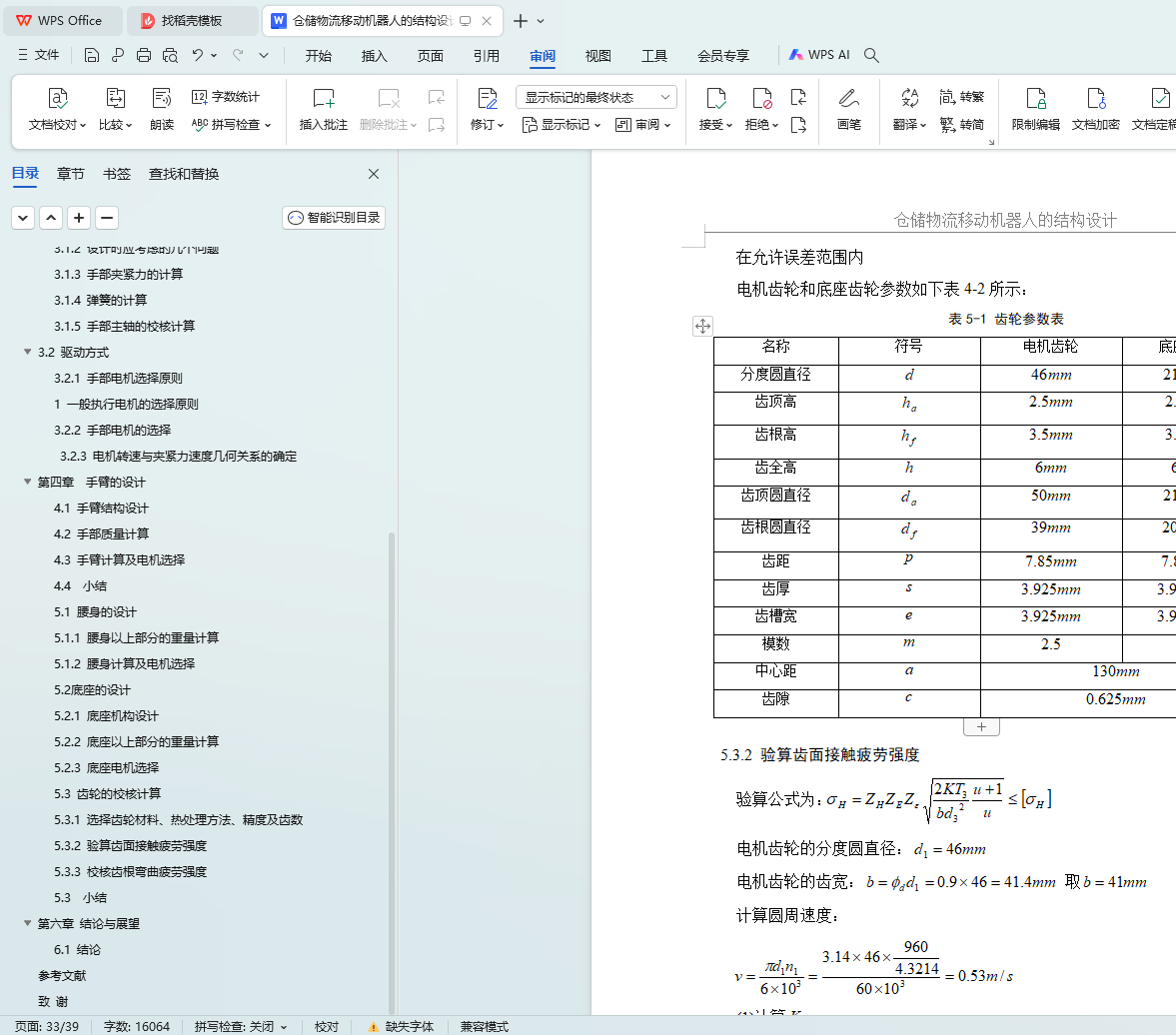
5.3.2 验算齿面接触疲劳强度
5.3.3 校核齿根弯曲疲劳强度
5.3 小结
第六章 结论与展望
6.1 结论
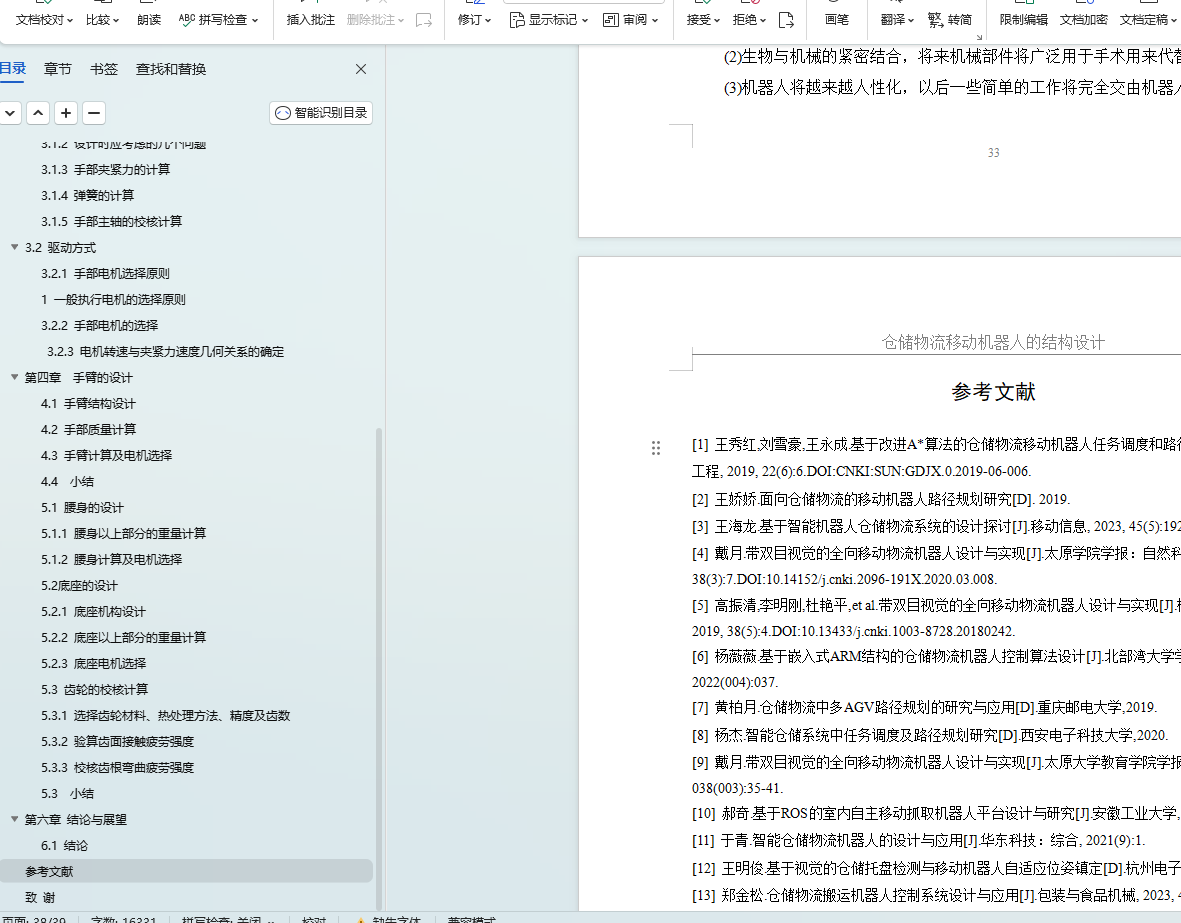
参考文献
致 谢 5