|
1. Ŀ�ļ����壨����������о���״��������
�������ҹ��Ƽ�ˮƽ�IJ����������Զ����Ѿ���Ϊȡ��������Ϊ��ҵ��չ����Ҫ�����ҹ�����ҵ���ֳ�Ѹ�ٷ�չ̬�ƣ������Ż��Զ�����ػ�е�ṹ�Ӷ���������Ч�ʡ�
�ڹ�ҵ���������������ڣ����ڹ�������Ҫ�����Ǿ����ܵ����¡���ʴ���ж���������ص�Σ���������˹������Ͷ�ǿ�ȣ�����Σ�����������˻����˾��������������µ����ģ���е���ǹ�ҵ������ϵͳ�д�ͳ������ִ�л������ǻ����˵Ĺؼ�����֮һ�����ر����ڸ��¡���ѹ����۳�����ȼ���ױ��������Եȶ��ӻ����У��Լ����ء�������Ƶ���IJ����д�������ҵ����е����ȻĿǰ�����������������������в����ظ��������Ͷ�����֪ƣ�ͣ�����Σ�գ�ץ�����������������������ص㣬��˻������㷺��Ӧ�á�ִ�л�����е�ֵ����࣬��������ʽ�ɷ�ΪҺѹʽ������ʽ���綯ʽ����еʽ��е�֣��總ͼ1��2��3��4��ʾ�������÷�Χ�ɷ�Ϊר�û�е�ֺ�ͨ�û�е������;���˶��켣���Ʒ�ʽ�ɷ�Ϊ��λ���ƺ������켣���ƻ�е�ֵȡ�
Versatra��Unimate ��Ϊ����Ļ�������20�������ڱ��з��������� Umination��˾�����總ͼ5��ʾ����������� 80 ���ʱ���ʱ�������Ҷ��ڸ�����Ϣ����ʼ��������ķ�չ�����ŷ�ޡ� �������ձ��������ȶ����������Ϣ�����õķ�չ�ٶȸ����������ң��Ͱ��˻�����������˵�������������ҵİ��˻����˷�չ������Ϊ���ƣ���չ�����Ϊ�ḻ���ڽ����꣬�������������Ҹ����������Ϣ�Ƽ�����ķ�չ��Խ��Խ�����ҵ��Ҫ���˻�����Ϊ����ҵ��չ�ṩ���������ڴˣ��������Ҷ��ڰ��˻����˵��о�Ҳ��ø�Ϊ���롣���ֽεİ��˻����˷�չ�о������˵���¹��� KaKU ��˾��չ������Ϊ���졣�ڶ��ֲ�ͬ���͵İ��˻������������棬�¹� KuKA ��˾������ˮƽ��������ǰé��
�ҹ����˻����˵ķ�չ��ŷ���������ձ���Ҫ����1988�꣬����������ѧ�����о����з��˵�һ��������Ŧ���˻�����ϵͳ��1992���������ѧԺ���Ƴɹ��˹�ѧ�������˻����ˣ����ҹ�ѧ�������˻�����Ӧ���ں˵�վ������1998 �꣬�ں�Ӿ��̳������������豸��˾�����˶�ģʽ��������˻����ˣ��������������������о��ͷ�չ�����ڰ��˻��������켼�����죬����רҵ�������ܻ��� ���ɻ��ķ���չ��ȡ��һ���ijɾ͡����Ҷ��Զ��������˵�����ҲԽ��Խ��
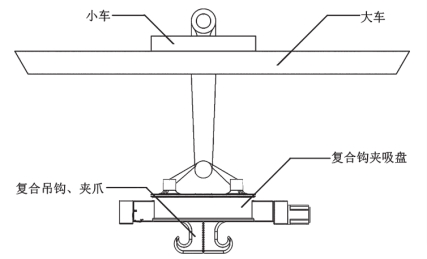
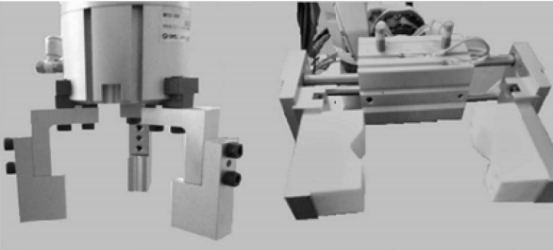
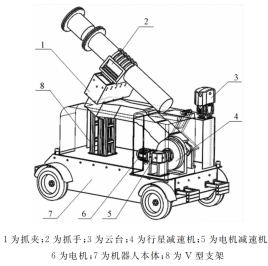
2021��Ҧ���ĵ����ڷǷ����Է��������̨�����۹����У��轫�������ƼغϽ����������м��д洢�ʹ�����Ŀǰ�������������������˹����ˣ�Ч�ʵ���Σ���Խϸߡ�Ϊ��������������������ȫ���˵����⣬����һ��ר�ð��˻������Զ�����װ�õ�������Ʒ������豸���֣���Ҫ�о���е��ĩ��ִ��������צ�����ϻ�������ƺ��豸�ĵ�������ϵͳ������ĩ��ִ�л������з�����������˻������Զ�����װ �ð����ӳֻ����ͷ�ת���������мгֻ���������צ����צ����װ�á��� ��֧�ܵȣ���ת������������װ�á��ۡ�֧����Ȳ��������˻�������Ҫ����ʾ��ͼ�總ͼ6��7��ʾ��
2. �о����ݼ��������������Ĺؼ����⣩��
2.1�����
���о�����Զ��칤������װж�����˵����չ���о��������ؼ����������˽ṹ��ơ��˶�ѧ�������㲿����ơ�����������Ӧ�õȷ��档�����ļ�������������������˵ĸ����������˶����Ⱥ��ȶ��ԣ����ʵ�ֿ��ٶ�λ��ץȡ�����ȹ��ܡ�
1) ������ƣ�ȷ����е��������״����С����ɲ����������ά��ģ��ȷ����е�Ľṹ�ܹ�����װж�����Ҫ���Ҿ߱��㹻���ȶ��Ժ�ǿ�ȡ����ǻ�е�Ŀ���ϵͳ�Ͱ�ȫ����װ�ã���ȷ���������̵İ�ȫ�ԡ�
2) ������ƣ�����ʵ�ʵ���ҵ���̺�Ҫ�滮��е�������ֵ�λ�úͲ��֡��Ż����ֿ���ʹװж���̸���˳�������ٲ���Ҫ��ʱ���˷Ѻ��Ͷ�ǿ�ȡ�
3) �ؼ�Ԫ��ѡ�������ƥ�䣺ѡ���ʺϵĻ�е�ṹ�������в�������ƣ�ȷ����е�ṹ���к������ܺͿɿ��ԣ���ȷ���������е������������ƥ�䣬��ȷ������װ�õ�Э�����С�
4) ����Ԫ������ǿ��У�ˣ�ģ���е�ڲ�ͬ�����������ܵ�����ѧӦ���ͱ������������ǿ��У�ˣ���ȷ����е��ʹ�ù����в�����ֽṹʧЧ���ƻ��������
2.2�����Ĺؼ�����
1) װж�����������������װж��е�ڼ���¯�Ͷ�ѹ��������λ�е�װж�������ȫ�����������������ͼ����������ࡢ�ߴ硢������Ҫ���Լ�װж�����е����������羫��λ�����ٲ����ȡ�ͨ�������˽�������������Ƴ���Ӧ��ǿ����Ч���װж����Ļ�еװ�á�
2) �ṹ��ƺ���ѧ�����������װж��еװ�õĽṹ��ƺ���ѧ���Խ��з������Ż������漰����е�ṹ��ѡȡ���ؽڲ��֡�����ѡ��ȷ��档ͨ������Ԫ������ǿ��У�ˣ�������еװ���ڳ����������նȡ��ȶ��Եȷ���ı��֣�ȷ����еװ����װж�����еİ�ȫ�ɿ��ԡ�
3) ��ά��ģ�뼯�ɣ��������������϶����������ά��ģ��������е�ṹ������ϵͳ�Ͱ�ȫװ�õȡ�ͨ����ά��ģ������ֱ�۵�չʾ��еװ�õ���ۺ��ڲ��ṹ��������ģ�����֤��ͬʱ����Ҫ���и����ֵļ�����ƣ�ȷ���������֮���Э����ͳһ��
2.3�����Ͳ���
�������������о����ݺ������Ĺؼ����⣬ȷ�����µ��о������Ͳ��衣
1) �����У����Ƚ��й�����������ĵ��У�����ѧ�����ġ��ڿ����º�ר���ļ��ȡ�ͨ���Ķ���Щ���ף��˽����װж�������ڶ�����ҵ�е�Ӧ�ú��о���״����ע�����˵����͡��ṹ��ơ�����ϵͳ����ȫ���ܵȷ�����о��ɹ����������ۺϷ����ͱȽϣ�Ϊ��������ṩ�ο��ͽ����
2) ʵ�ص��У����뵽������ҵ���빤��ʦ���˽��н������˽�ʵ�ʵ����������������̡��۲����е�װж������ν��У��˽������Ӧ�߱����ص���ܡ�ͬʱ���˽���ҵ�Ի����˵�������������Լ������豸���յľ����ԡ���Щ��Ϣ��ֱ��Ӱ�쵽��������Ʒ������ƶ���
3) ���巽����ƣ����ݵ��н���ƶ����칤������װж�����˵����巽����ȷ�������˵����ͣ��繤ҵ��е�ۡ�AGV�ȣ����ṹ��ƣ���ؽ���Ŀ���۳��ȣ���������ʽ����綯��Һѹ�ȣ��ȵȡ����ǻ���������Χ�豸�ͻ�����Э���ͻ�����ȷ�������˵Ŀɲ����ԺͰ�ȫ�ԡ�
4) �㲿����ƣ��������巽����Ƶ�Ҫ�Ի����˵ĸ����㲿�����о�����ơ�������е�ṹ����ۡ��ؽڡ����Ӽ��ȣ�������ϵͳ���������������ȣ��ʹ�����������/���ش��������Ӿ��������ȣ��������㲿�������칤�ա�����ѡ��װ�䷽ʽ�����أ�ȷ�����㲿���ڻ��������й����еĿɿ��Ժ��ȶ��ԡ�
5) ����Ԫ��������������Ԫ���������Թؼ��㲿������ǿ��У�˺��Ż���ơ�ͨ�������㲿����Ӧ���ֲ������������ƣ�������������㲿���Ŀɿ��ԣ���Ϊ�Ľ����Ż��ṩ���ݡ�
6) ��ά��ģ��ʹ��SOLIDWORKS����������ṹ������ά��ģ������ǰ����Ʒ������㲿����ƽ������ȷ���ƻ����˵ĸ������֣���������װ�Ͳ��֡����Ӳ��ʡ���ɫ��������ϸ�ڣ�����ǿģ�͵���ʵ�кͿ��ӻ�Ч�����⽫Ϊ�����������װ���ṩ�ο���
3. Ԥ�ڳɹ��ʹ��µ�
3.1Ԥ�ڳɹ�
1) ��Ƴ�һ�������ڶ�����ҵ�İ���װж�����ˣ�ʵ�ֿ��١�ȷ���ȶ��Ĺ������˺�װж�����Ƴ���άװ��ͼһ�ţ�SOLIDWORKS��ά��ģװ����һ�ס�
2) ��Ƴ����ʵĹؼ��㲿�����������ͼ3�š�
3) �Թؼ��㲿����������Ԫ������ǿ��У�ˣ��ó�Ӧ���ֲ�ͼ��
3.2���µ㣺
1) ��������Ʒ��棬ͨ�����ǿ���ϵͳ�Ͱ�ȫ����װ�ã�����˲������̵İ�ȫ�ԡ��⽫Ϊװж�����ṩ���ӿɿ��Ͱ�ȫ�Ľ��������
2) �ڲ�����Ʒ��棬ͨ���Ż����֣�ʹװж���̸���˳��������ʱ���˷Ѻ��Ͷ�ǿ�ȡ��⽫��߹���Ч�ʲ����������ɱ���
3) �ڹؼ�Ԫ��ѡ�������ƥ�䷽�棬ͨ��ѡ����ʵĻ�е�ṹ�ͽ��в�������ƣ�ȷ����е���к��ʵ����ܺͿɿ��ԣ���������������ƥ�䡣�⽫���е������Э���Ժ��ȶ��ԡ�
4) ������Ԫ������ǿ��У�˷��棬ͨ���Ի�е������ѧӦ���ͱ���ģ�⣬����ǿ��У�ˣ�ȷ����е��ʹ�ù����в�����ֽṹʧЧ���ƻ���������⽫���ӻ�е�Ŀɿ��Ժ�ʹ��������
4. �������ȼ�ʱ�䰲�ţ�
1.2023��11��7��-11��30�ղ��������飬�ռ�������ϣ���д���ⱨ�棻
2.2023��12��1��-12��31��д���ⱨ�棬�μӿ��ⱨ�����ۻ
3.2024��1��1��-3��24�������о�������ϣ���������Ҫ����ɱ�ҵ���ʵ�����֣���ɱ�ҵ���ij��壬�ͽ�ָ����ʦ��
4.2024��4��1��-4��14�շ��������ģ��ͽ�ָ����ʦ��ָ����ʦ���ĺ��������������
5.2024��4��16��-4��30�ս��б�ҵ�����ظ��ʼ�⣻
6.2024��5��1��-5��10�ս���ҵ��Ƽ����ģ����壩�ͽ�ָ����ʦ��������ʦ�������IJ����֣����д�硣
5. �����
[1] ���������������˸������ģ�ͽ�������̬���Է�������[J]. ������;����;������;���ӽ�.��е�����,2021(01)
[2] �������˽ṹ�����ģ̬����[J]. ��ռ��;�����;������;�����.��е���������,2022(08)
[3] ���Ի�е�ֶ���ѧ�о���չ[J]. ����;����·;������;�Ž���;��С��.��е���,2019(01)
[4] ���ٰ��˻����˲�ҵӦ�ü���չ[J]. ���ﳼ;Ҧ�S��;������;��ܷ�;�ּ���;������.�Ṥ��е,2022(02)
[5] ��ҵ�����˷�չ��״������[J]. ��־��;���ƾ�;��ѩ��.���ֹ��̼���ʦ��ѧԺѧ��,2021(07)
[6] ����MATLAB-Robotics������Ĺ�ҵ�����˹켣�滮�������о�[J]. ������;���;�α���.��е����ʦ,2021(07)
[7] һ�����ܰ��˻����˵������ʵ��[J]. ����ƾ;������;�����.��������������,2021(02)
[8] ��������3D���������߱��ϵͳ[J]. ������;���;���;����;ͯ�ϸ�;������;���.��е���������,2020(11)
[9] �ൺ�����������������������Ŀ����[J]. .��ѹװ�������켼��,2019(04)
[10] �������˻���������˶�ѧ�о�[J]. ���ΰ;�O��.��е���������,2019(06)
[11] Ҧ���ģ����ٶ���л ������ ��������÷.�����ƼغϽ����������˻������Զ�����װ�����[A].�� �� �� �� ҵ��2021�꣬21��9����332-335
[12] ������ �룬�� �ۣ��������С������˳��.���˻����˷�չ��״��չ��.[J].�˹�������������о���2021��, 10(2)��144-153
6.��ͼ
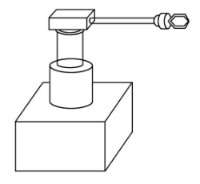 
ͼ1 Һѹʽ��е�ּ�ͼ ͼ2 ����ʽ��е��
ͼ3 �綯ʽ��ܻ�е��
ͼ4 ��еʽ��е��

ͼ5 Versatra ������
 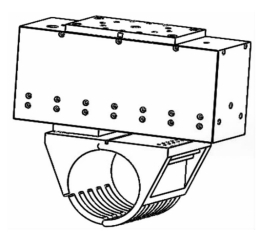
ͼ6 ����ʾ��ͼ ͼ7 �гֻ���ģ��
ָ����ʦ�����
ָ����ʦǩ���� �� �� ��
|
