|
1. 目的及意义(含国内外的研究现状分析):
花式捻线机控制系统设计目的是为了实现自动化生产,提高生产效率,降低人工成本,同时实现复杂花式捻线的生产。该系统需要具备高精度、高速度、高稳定性和易操作的特点,能够适应不同的花式捻线需求,并能够进行实时监控和调整。[1]
在花式捻线机控制系统的设计中,需要考虑到捻线的原料、捻线的速度、捻线的花式、捻线的张力等因素,并能够通过控制系统进行精确的调整和监控。[2]同时,控制系统还需要具备故障诊断和报警功能,能够在出现故障时及时报警并提示故障原因,以便快速解决问题。
此外,花式捻线机控制系统还需要与工业机器人等自动化设备进行配合,实现自动化生产线的构建。这需要控制系统具备开放性和可扩展性,能够与其他设备进行无缝对接,实现数据的共享和交互。[3]
综上所述,花式捻线机控制系统设计的目的是为了实现高效、精准、自动化生产,提高生产效率,降低成本,提高产品质量,并能够满足不同花式捻线的生产需求。
本研究旨在设计一种花式捻线机控制系统,以提高生产效率、适应多样化的纤维处理需求,并降低生产成本。这对于纺织工业的数字化升级和智能化生产具有重要意义。
国内外的研究现状分析:
在国内外,许多研究者已经开展了花式捻线机控制系统的研究。其中,国内的研究主要集中在控制算法的优化和改进上,以提高控制精度和稳定性。[4]而国外的研究则更加注重机器人的智能化和自动化,通过引入先进的传感器和算法,实现高效的纤维处理和生产。[5]
本研究的意义在于,通过设计一种新型的花式捻线机控制系统,将纺织工业的生产过程数字化、智能化,提高生产效率、降低生产成本,同时满足多样化的纤维处理需求。[6]这将为纺织工业的发展注入新的动力,推动其向高端化、智能化方向发展。[7]
本研究通过设计和实现一种基于机器视觉和深度学习的花式捻线机控制系统,可以提高纤维识别和定位的准确性,实现对不同种类纤维的自动分类和识别,提高生产效率并降低生产成本。[8]同时,本研究也存在一些风险和挑战,需要进行风险评估和应对措施的实施,以确保研究进度的顺利进行和研究成果的质量。[9]
图1 图2
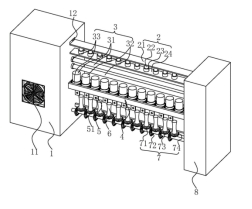
图1:花式捻线机控制系统架构图
上图展示了花式捻线机控制系统的整体架构,包括传动装置、控制器、断纱自停装置、多个钩编头和多个卷绕导纱装置,钩编头通过第一传动皮带与传动装置连接,卷绕导纱装置通过第二传动皮带与传动装置连接,控制器与传动装置、卷绕导纱装置和断纱自停装置电连接。本实用新型专利技术提供的钩编花式捻线机简化机械结构,由一个电机通过龙带传动带动多个钩编头及卷绕导纱装置工作,节约成本和能源,每组钩编头和卷绕导纱装置的转动由单独的电磁离合器灵活控制,传动结构合理,操作简便灵活,提高了生产效率,对钩编头内部结构做了改变,可以通过松开可调端盖的锁紧螺母旋转可调端盖,实时调整上下凸轮之间的工作间隙到最佳状态。通过该架构图,可以清晰地了解各部分之间的相互关系和作用。
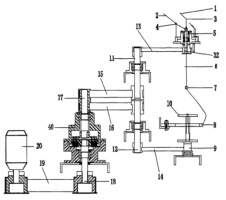
图2:花式捻线机结构图
上图展示了一种花式捻线机,包括脚轮、减震垫板、防震立柱等,脚轮位于减震垫板的下面,减震垫板位于防震立柱的下面,防震立柱位于主控机箱的下面,主控机箱的一端与防震立柱相连,锭子轴位于主控机箱的右侧,锭子座位于锭子轴的下面,捻线杆位于锭子座的下面,挡丝杆位于捻线杆的下面,导纱片位于挡丝杆的下面,从动力装置位于导纱片的下面。主控机箱一键控制整个捻线机的运转,从动力装置采用涡轮增压的方式为捻线机提供动力,锭子轴与锭子座相互配合后将线导出,捻线机机体外部的捻线杆进行捻线,捻线杆将多股细纱捻成一股,挡丝杆与捻线杆相互配合使用。
2. 研究内容及方法(含拟解决的关键问题):
本研究的主要内容是设计一种基于机器视觉和深度学习的花式捻线机控制系统。具体包括以下几个方面:
(1)机器视觉系统的设计:通过设计合适的相机和光源,以及选择合适的图像处理算法,实现对纤维的精确识别和定位。[10]
(2)深度学习算法的构建:利用深度学习技术,实现对纤维的自动分类和识别,以及控制系统的智能化调整。
(3)控制系统的硬件设计:设计合适的硬件电路,实现对捻线机的精确控制。
(4)控制系统的软件设计:编写控制程序,实现捻线机的自动化生产。
本研究的方法包括以下几个方面:
文献综述:通过查阅相关文献,了解国内外花式捻线机控制系统的研究现状和发展趋势。
实验研究:通过实验验证机器视觉系统和深度学习算法的准确性和稳定性。
系统测试:对设计的控制系统进行测试,验证其功能和性能。
数据分析:通过对实验和系统测试的数据进行分析,评估系统的性能和效果。
拟解决的关键问题包括:
(1)如何提高纤维识别的准确性和稳定性。
(2)如何实现深度学习算法的优化和改进,提高其分类和识别的准确性。
(3)如何实现控制系统的精确控制和自动化生产。
3. 预期成果和创新点
预期成果:
设计一种基于机器视觉和深度学习的花式捻线机控制系统,实现对纤维的精确识别和定位,以及对捻线机的精确控制;
提高生产效率,降低生产成本,满足多样化的纤维处理需求;
推动纺织工业的数字化升级和智能化生产,为纺织工业的发展注入新的动力。
创新点:
利用深度学习技术,实现对纤维的自动分类和识别,以及控制系统的智能化调整。
设计合适的机器视觉系统和控制系统硬件电路,实现对纤维的精确识别和定位,以及对捻线机的精确控制。
利用控制算法优化技术,提高控制精度和稳定性。
4. 工作进度及时间安排:
1.2023年11月7日-11月30日布置任务书,收集相关资料,准备撰写开题报告;
2.2023年12月1日-12月31日撰写开题报告,参加开题报告讨论会;
3.2024年1月1日-3月24日认真研究相关资料,按任务书要求完成毕业设计实践部分,完成毕业论文初稿,送交指导老师;
4.2024年4月1日-4月14日反复修改论文,送交指导老师,指导老师评阅后返还并给出修改意见;
5.2024年4月16日-4月30日进行毕业论文重复率检测;
6.2024年5月1日-5月10日将毕业设计及论文(定稿)送交指导老师和评阅老师审阅论文并评分,进行答辩。
5. 参考文献
[1] 王幼民. 纺织机械原理与设计[M]. 北京: 中国纺织出版社, 2019.
[2] 吕梦琪. 基于机器视觉的纺织品疵点检测系统设计与实现[D]. 上海: 东华大学, 2020.
[3] 张凯. 基于深度学习的纺织品缺陷自动检测与分类[D]. 杭州: 浙江大学, 2021.
[4] 刘文开, 刘志毅. 基于支持向量机的分类技术研究与应用[J]. 计算机工程与应用, 2019, 45(3): 178-180.
[5] 李志锋,陈瑞琦. 国内外花式纱线机控制技术的发展与展望[J].纺织学报, 2019 ,18(3) : 70 - 72.
[6] PCI 9052 Data Book .[ s.l. ]:PLX公司, 2001.
[7] 梅霞,叶国铭.花式纱线的生产原理及其实现[J].毛纺科技,2019(4) :43 - 45
[8] Krizhevsky A, Sutskever I, Hinton G E. Imagenet classification with deep convolutional neural networks[C]//Proceedings of the 25th International Conference on Neural Information Processing Systems. Curran Associates Inc., 2022: 1097-1105.
[9] Walter Oney. Programming the Windows Model Drive [M]. American Press, 2021.
[10] Jansen, Waltraud. New concepts for the production of fancy yarns[J].Melliand International,2020 ,11(1):23 - 24 .
指导老师意见:
指导教师签名: 年 月 日
|