摘 要
本课题是基于PLC的智能饲养场控制系统设计,采用西门子的小型可编程控制器S7-200,外加步进驱动器和步进电机,组态王为上位机,设计了一套基于PLC的自动喂料车控制系统。通过设定饮水时间和定时,喂料时间和速度等,通过控制步进驱动运行距离和速度调节喂料多少和次数。通过分析控制要求,进行了总体设计,进行了硬件设计,包括主电路,PLC输入和输出,进行了软件设计包括梯形图和语句表程序,进行了组态设计,设计了监控画面,进行参数设定,实时和历史曲线,实时和历史报警,实时和历史报表等。系统具有自动和手动模式,使用灵活,可以通过组态王进行各种参数设定,有多种保护措施,使用安全。
关键词:自动喂车;梯形图;可编程控制器
目 录
第1章 绪 论
1.1选题的背景、意义
1.2课题目的和主要内容
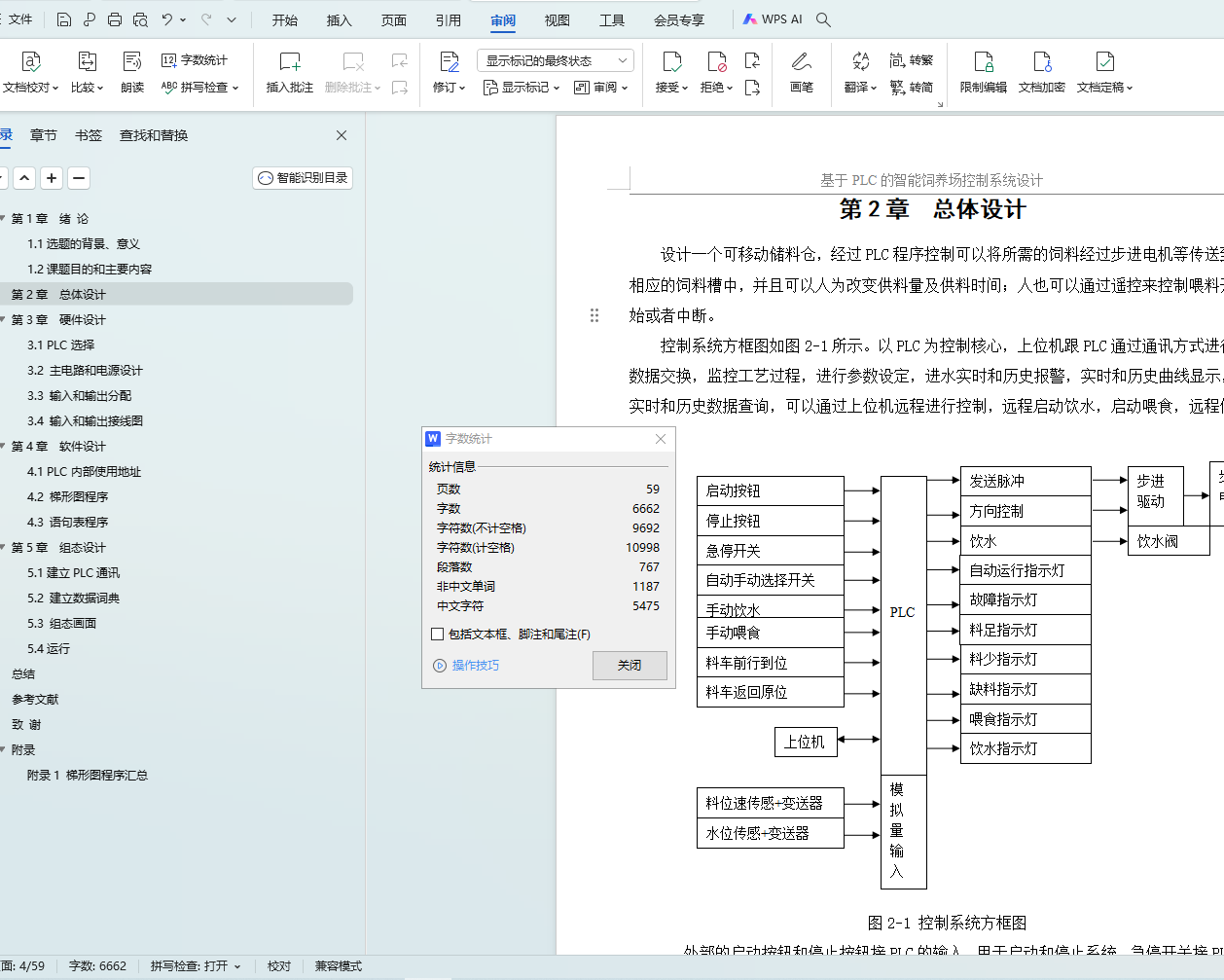
第2章 总体设计
第3章 硬件设计
3.1 PLC选择
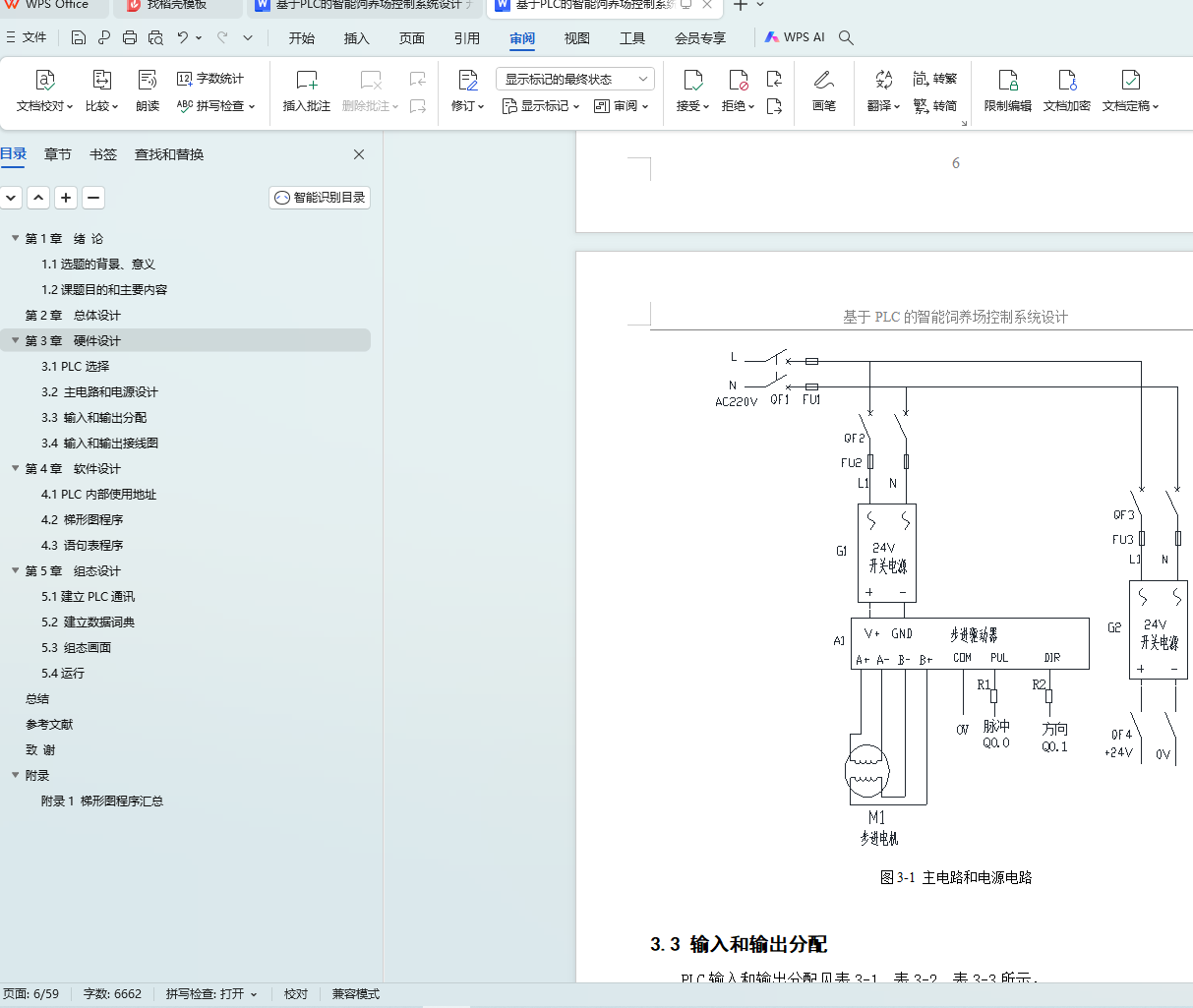
3.2 主电路和电源设计
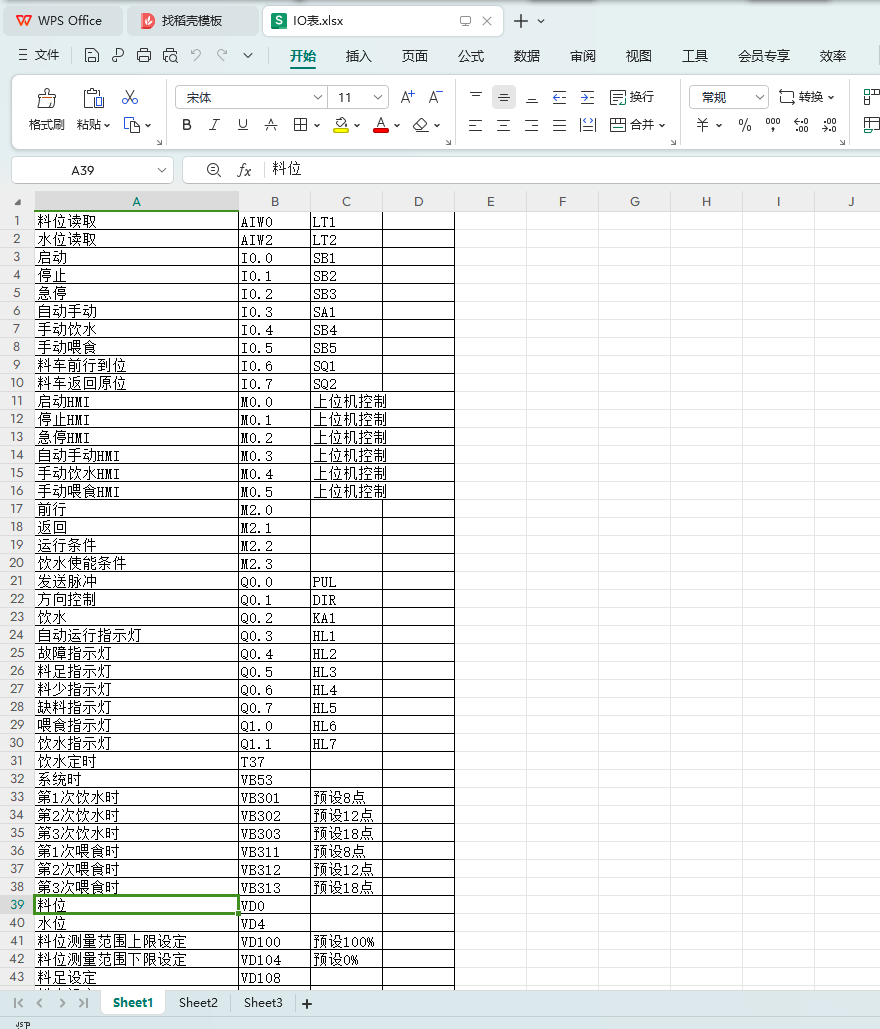
3.3 输入和输出分配
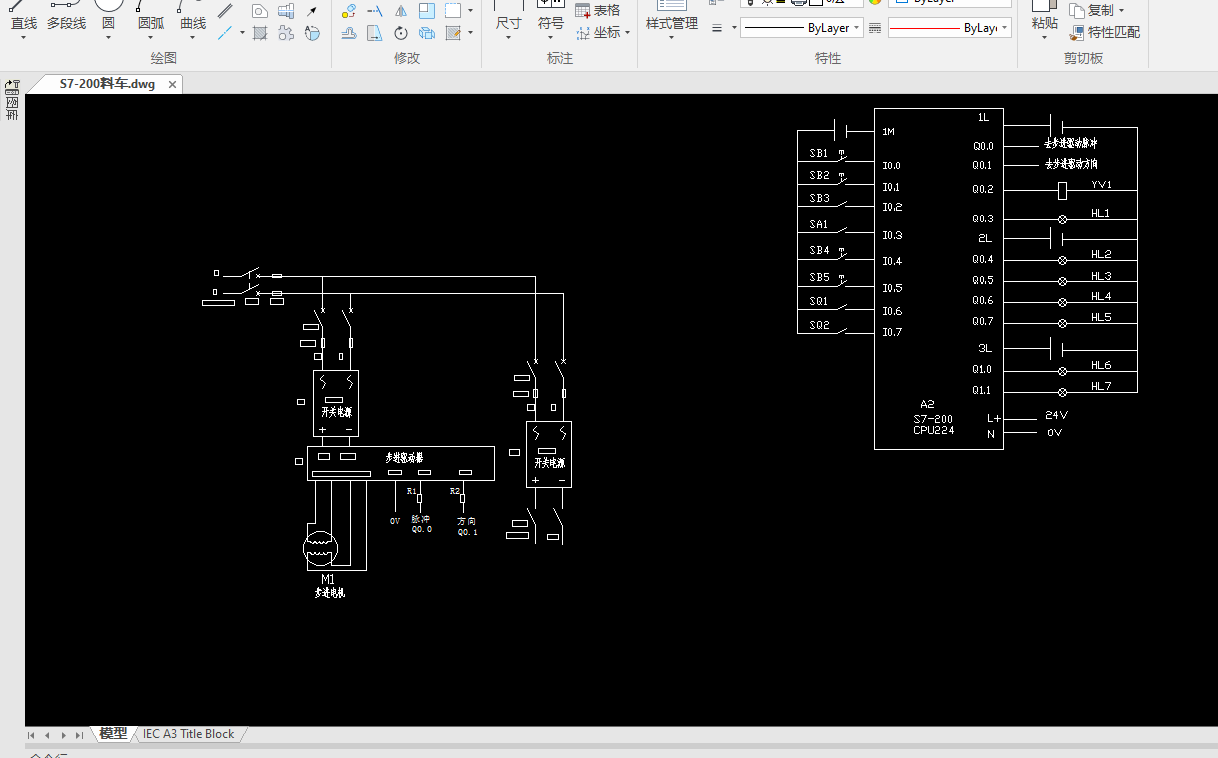
3.4 输入和输出接线图
第4章 软件设计
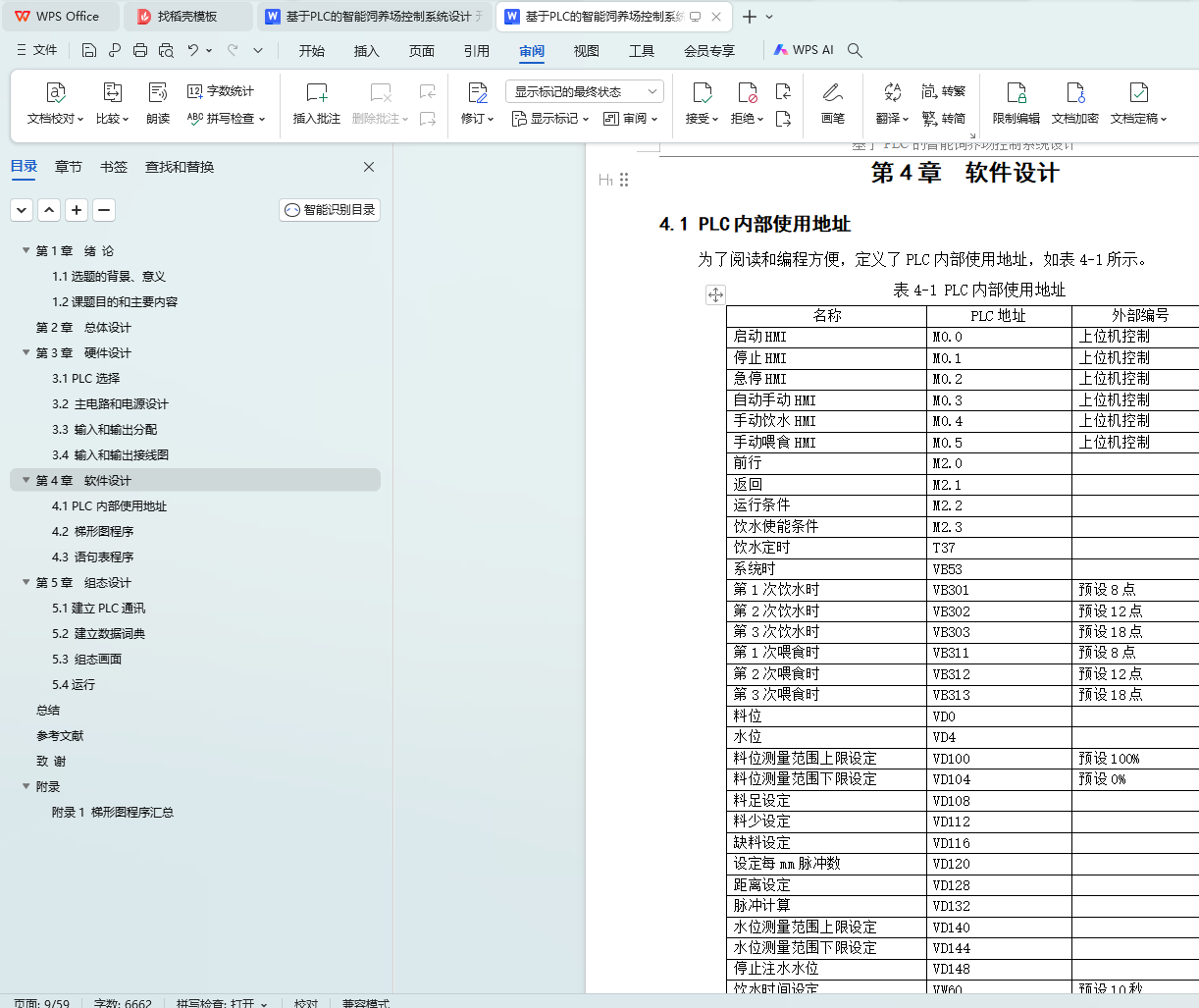
4.1 PLC内部使用地址
4.2 梯形图程序
4.3 语句表程序
第5章 组态设计
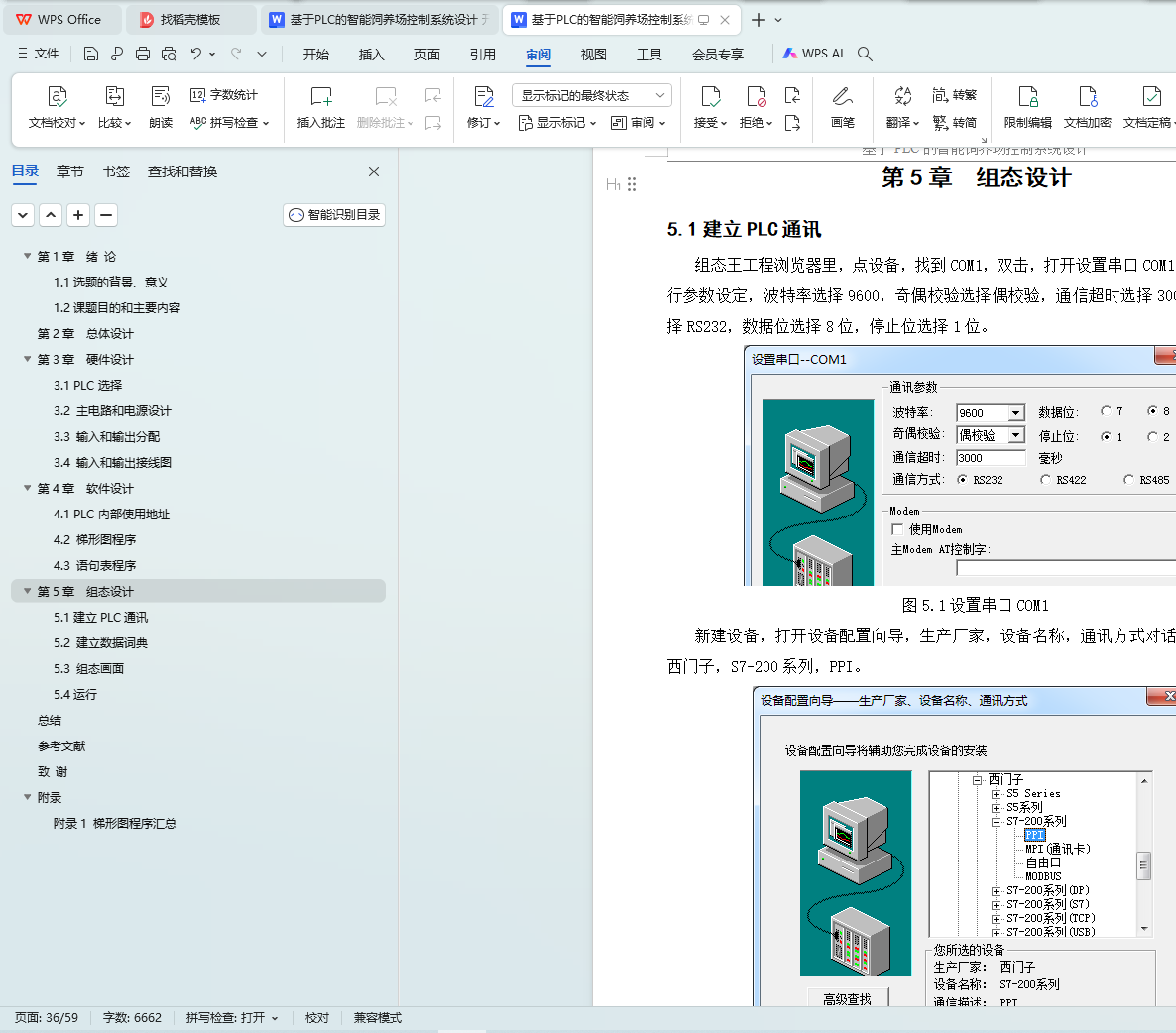
5.1建立PLC通讯
5.2 建立数据词典
5.3 组态画面
5.4运行
总结
参考文献
致 谢
附录
附录1 梯形图程序汇总