摘 要
轮椅是年老体弱者以及下肢伤残者必不可少的代步工具,但障碍物却使轮椅受到很大限制。现代由于采用了传统的轮式结构,只能够在平地上行走,面对台阶、楼梯这样比较复杂的地形却显得无能为力。高通过性轮椅设计是采用轮腿式机器人结构,正常行驶时轮式工作,采用四轮驱动;遇到障碍时腿式工作,从而适应大多数地形;车身则采用自动导轨式调平结构,该结构简单,调节方便。本次设计的主要工作包括:确定轮椅的工作方式以及工作结构形式、主体尺寸,并确定各主要零、部件的结构尺寸及其选型。
关键词:轮椅 高通过性 轮腿式机器人
Abstract
Wheelchairs are frail elderly and the disabled limb indispensable means of transport, but the obstacles while filling the wheelchair is very restricted. As with a traditional modern wheeled structure, can only walk on flat ground, facing steps, stairs, but this is more complex terrain powerless. High-pass design is the use of a wheelchair wheel legged robot structure, normal driving wheel work, the use of four-wheel drive; encounter obstacles leg work to accommodate most of the terrain; body is leveling automatic slide-type structure, the structure is simple, easy to adjust. The design of the main tasks include: determining wheelchair work and the working structure, body size, and identify the major components and parts of the structure size and selection.
Keywords: wheelchair high adoption round legged robot
目 录
1 绪论
1.1 研究目的
1.2 国内外发展现状
2 方案选择
2.1 常见方案
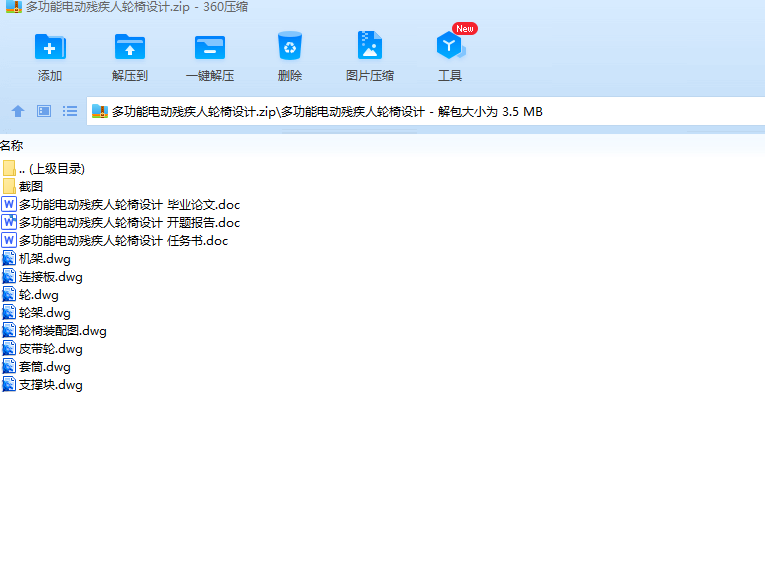
2.1.1 轮组式
2.1.2 履带式
2.1.3 腿式
2.1.4复合式
2.2 方案分析
2.2.1 目前研究中所存在的问题
2.2.2 方案选择
2.3 具体方案
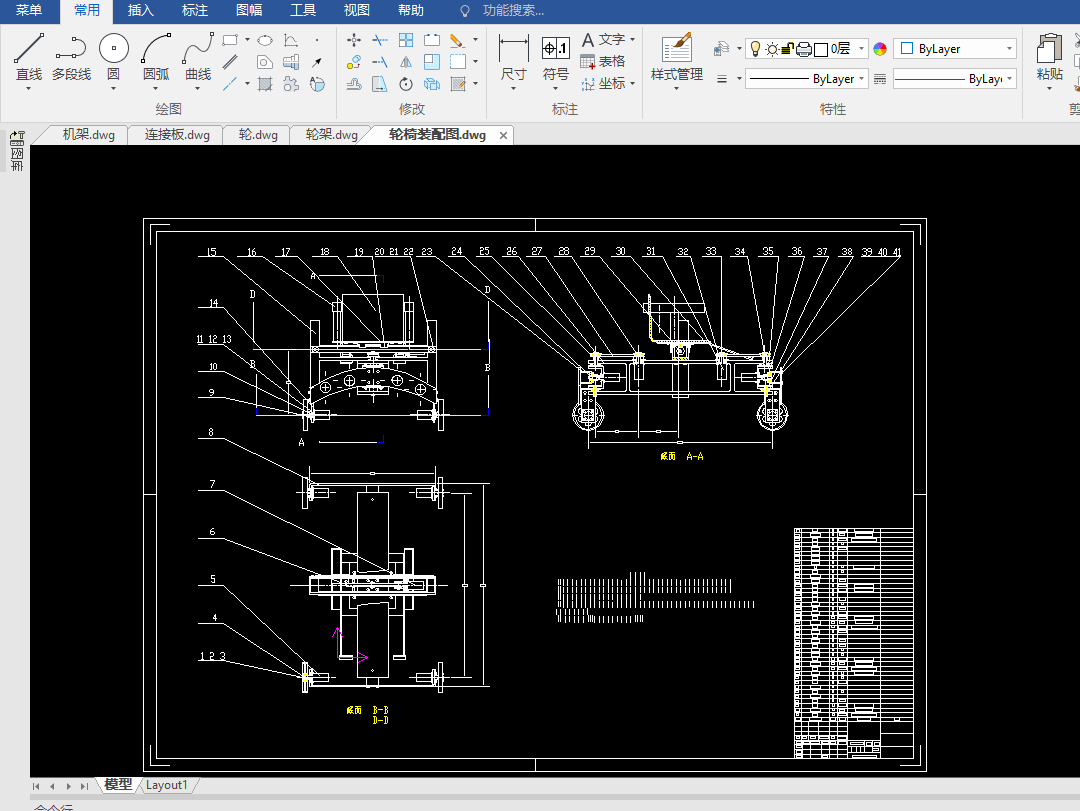
2.3.1 总体方案
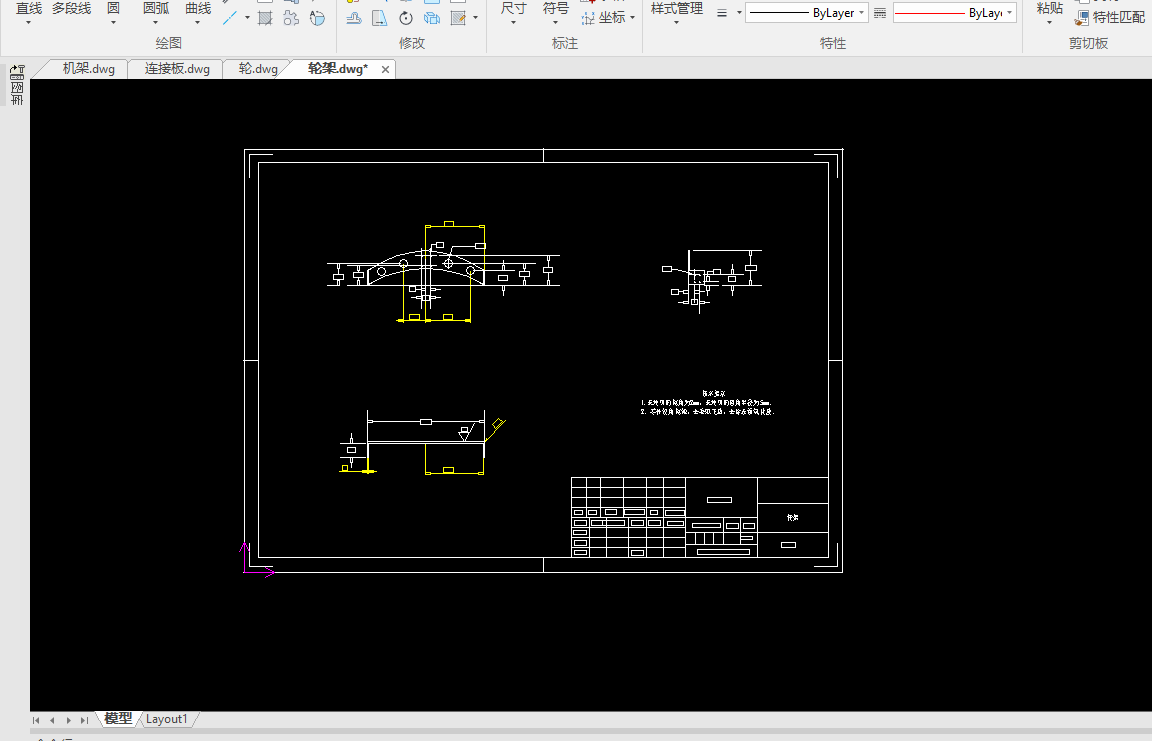
2.3.2 结构分析
2.3.3转向机构
2.3.4 越障功能
2.3.5 移动方式
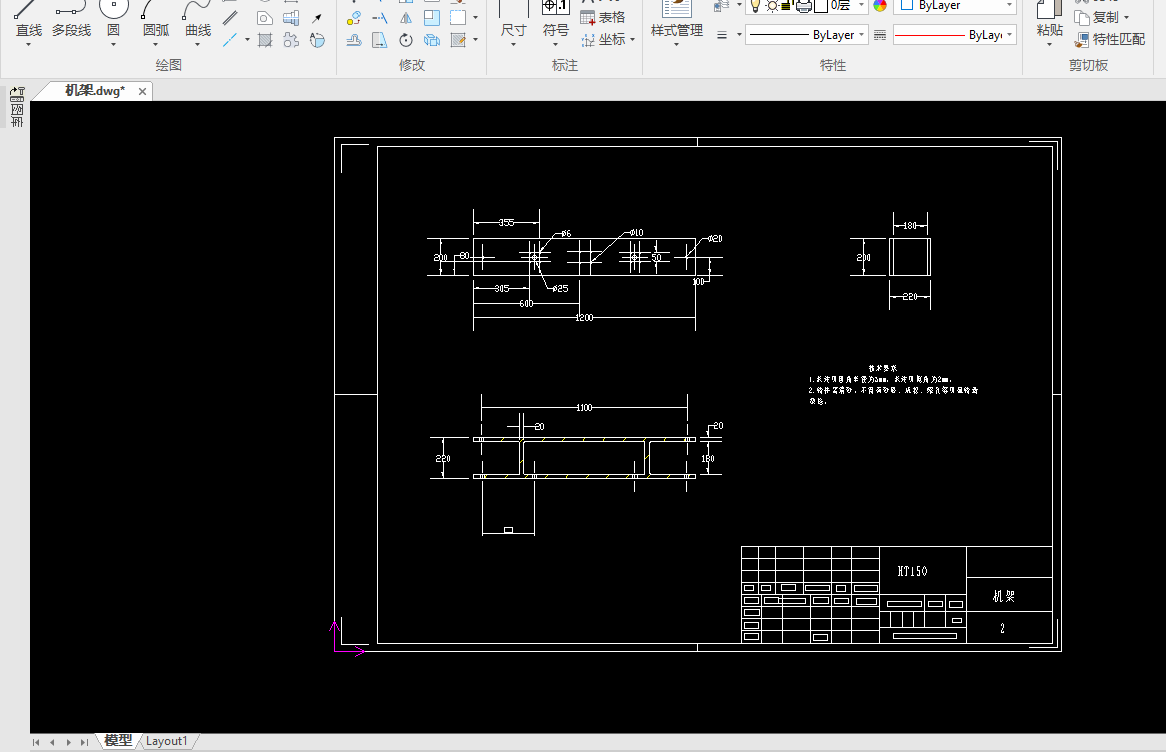
3 结构设计
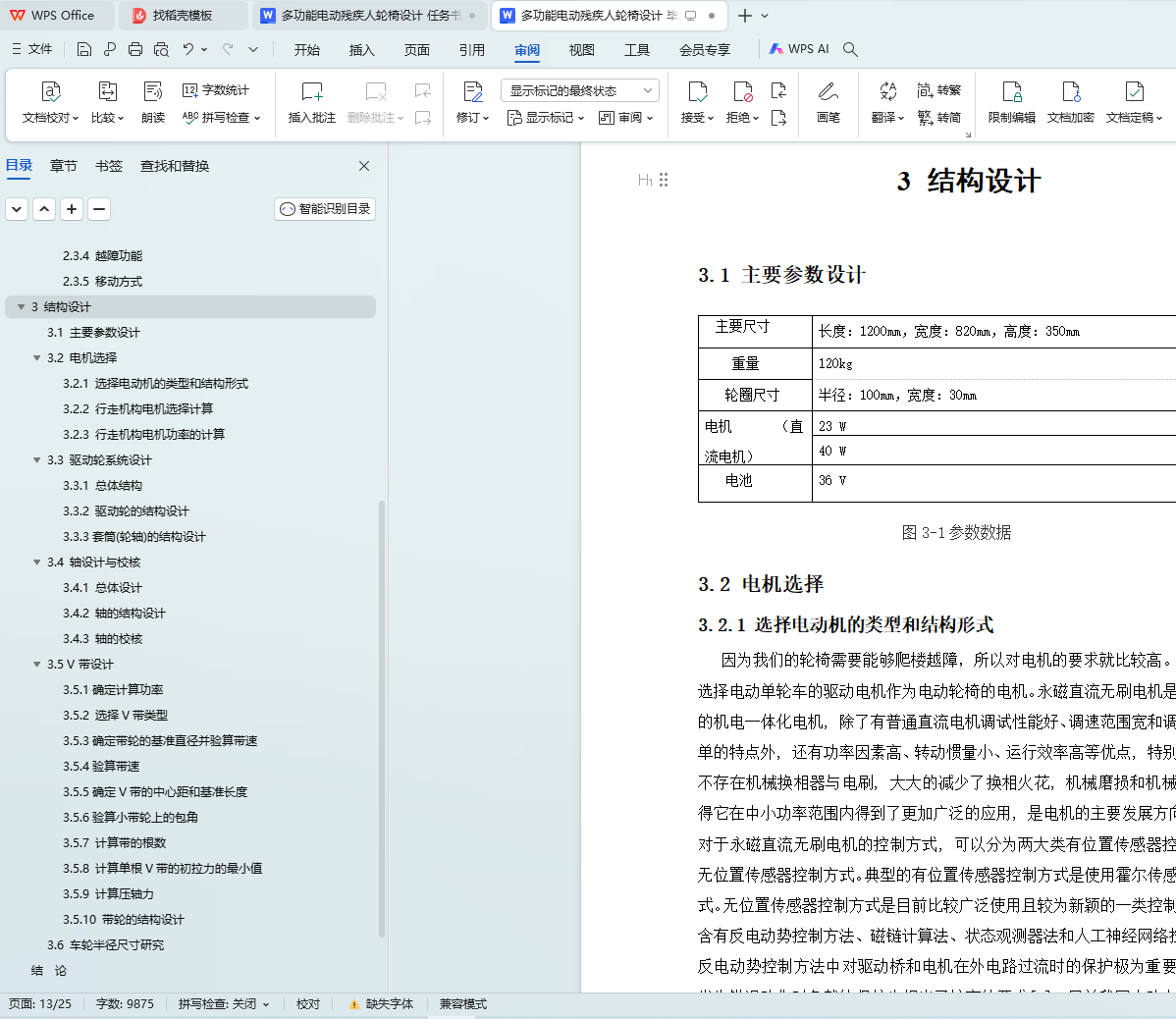
3.1 主要参数设计
3.2 电机选择
3.2.1 选择电动机的类型和结构形式
3.2.2 行走机构电机选择计算
3.2.3 行走机构电机功率的计算
3.3 驱动轮系统设计
3.3.1 总体结构
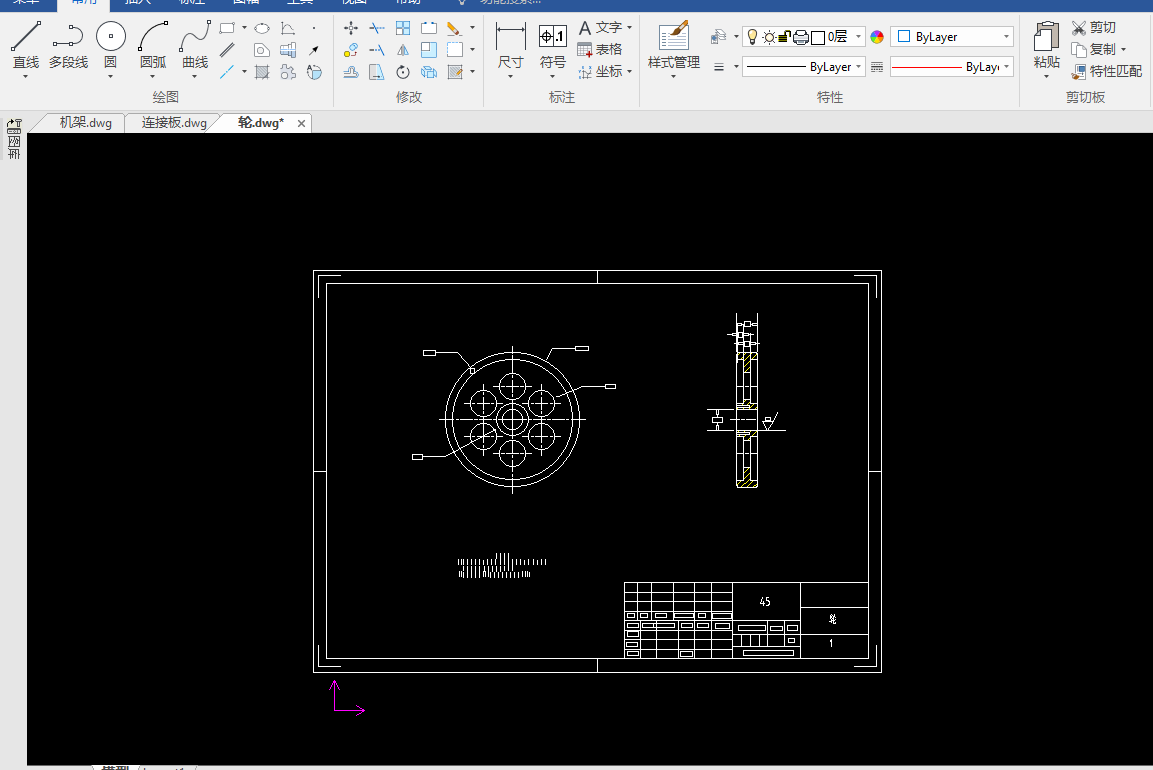
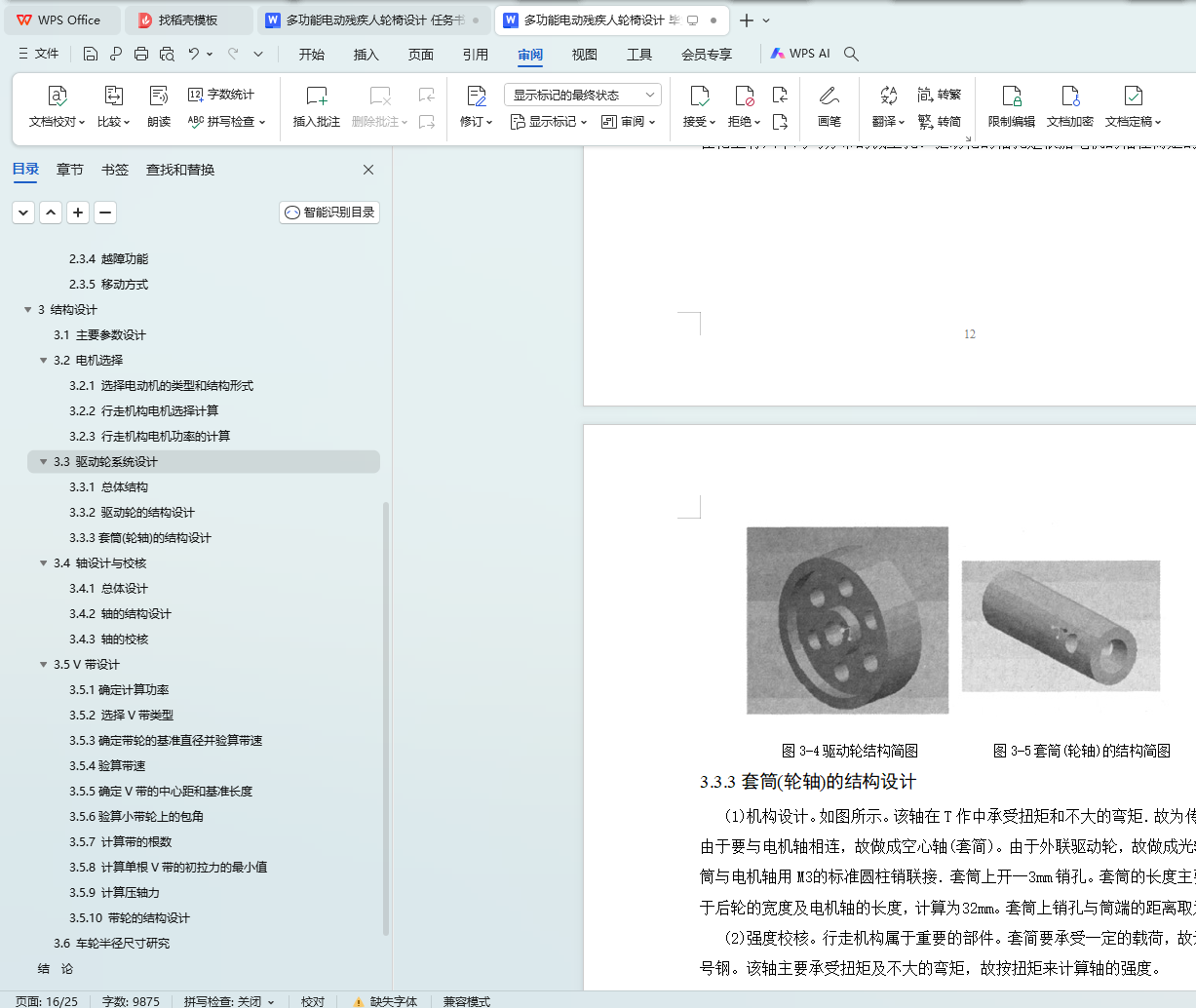
3.3.2 驱动轮的结构设计
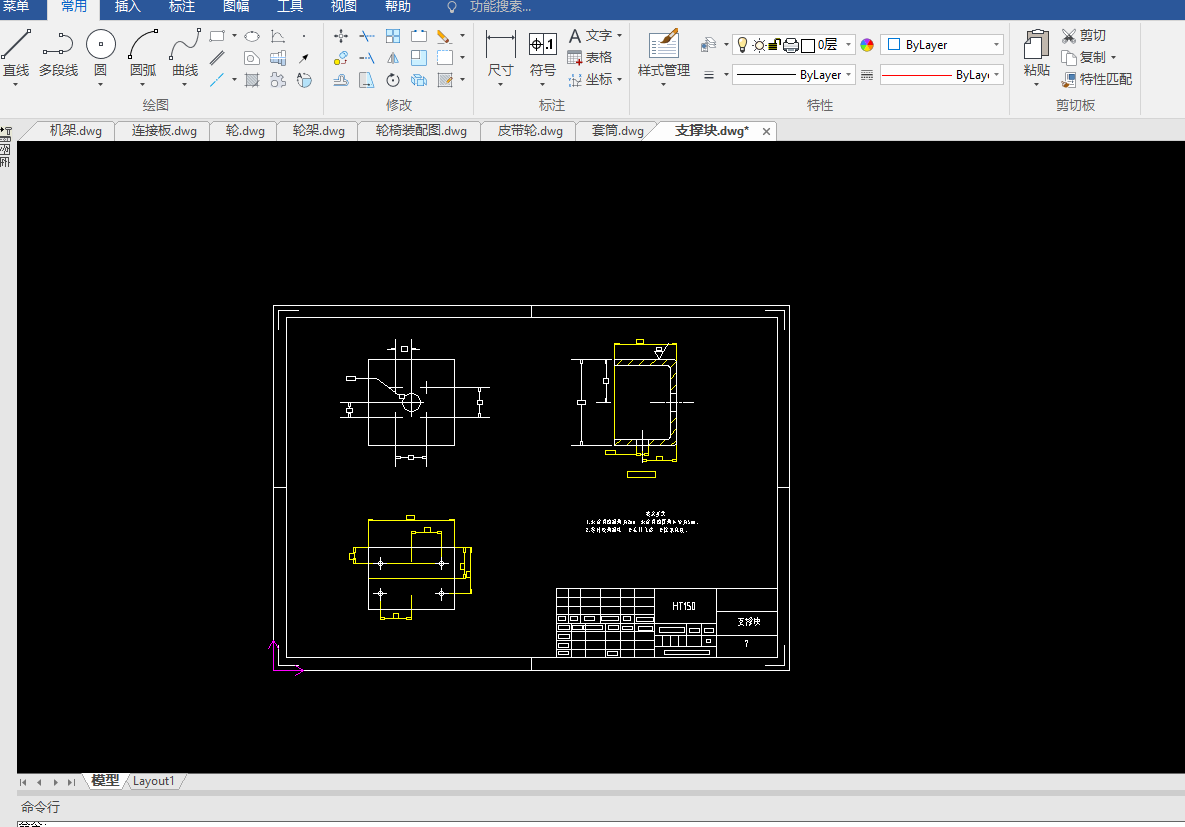
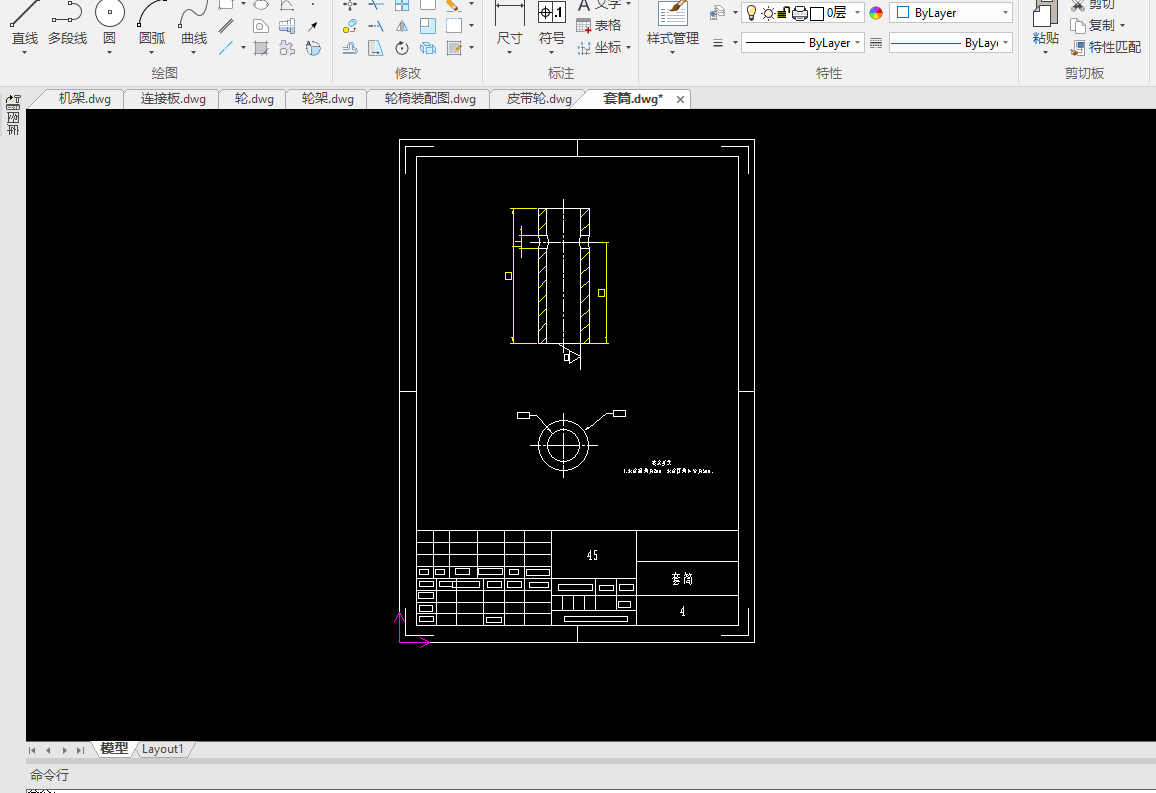
3.3.3套筒(轮轴)的结构设计
3.4 轴设计与校核
3.4.1 总体设计
3.4.2 轴的结构设计
3.4.3 轴的校核
3.5 V带设计
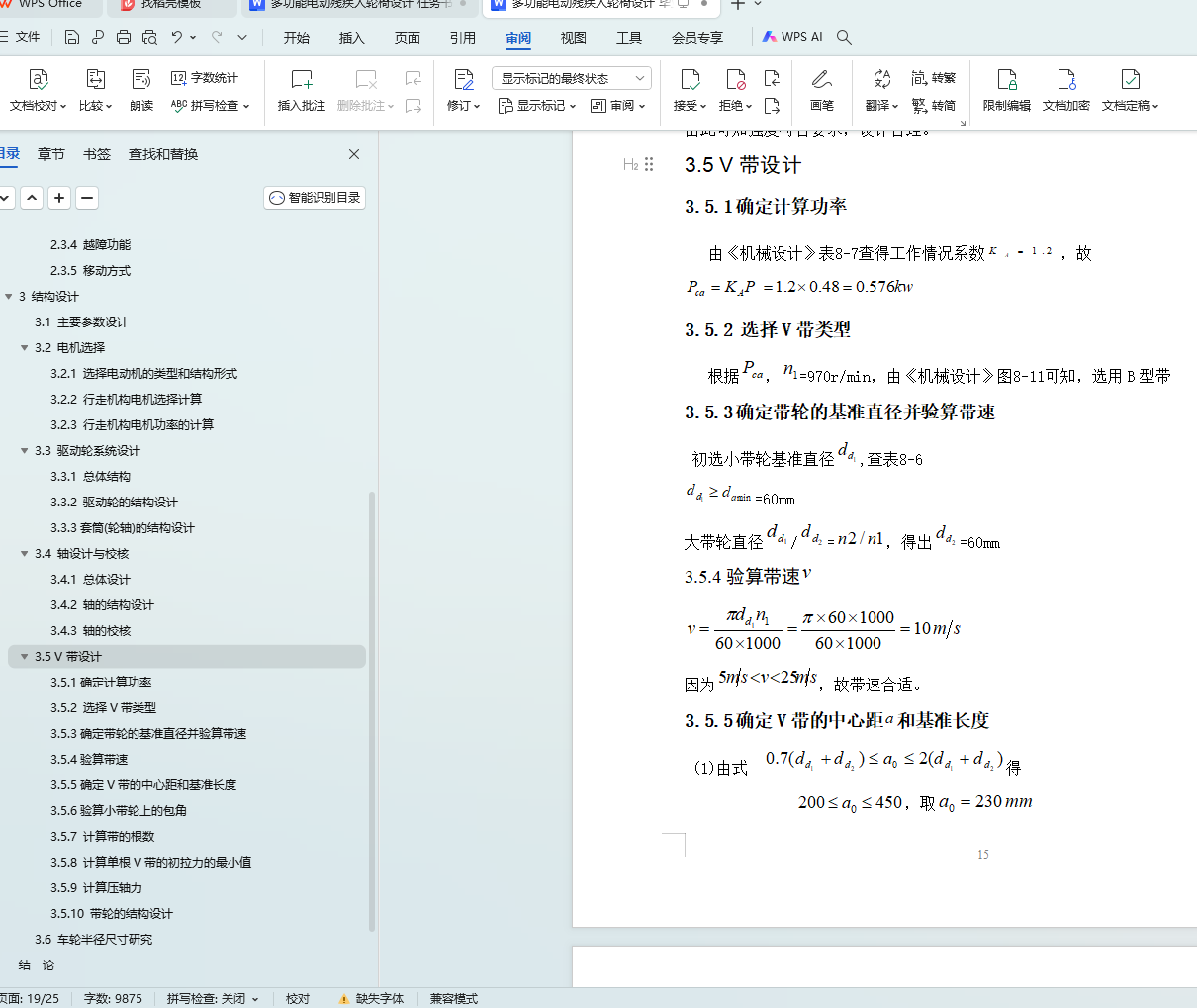
3.5.1确定计算功率
3.5.2 选择V带类型
3.5.3确定带轮的基准直径并验算带速
3.5.4验算带速
3.5.5确定V带的中心距 和基准长度
和基准长度
3.5.6验算小带轮上的包角
3.5.7 计算带的根数
3.5.8 计算单根V带的初拉力的最小值
3.5.9 计算压轴力
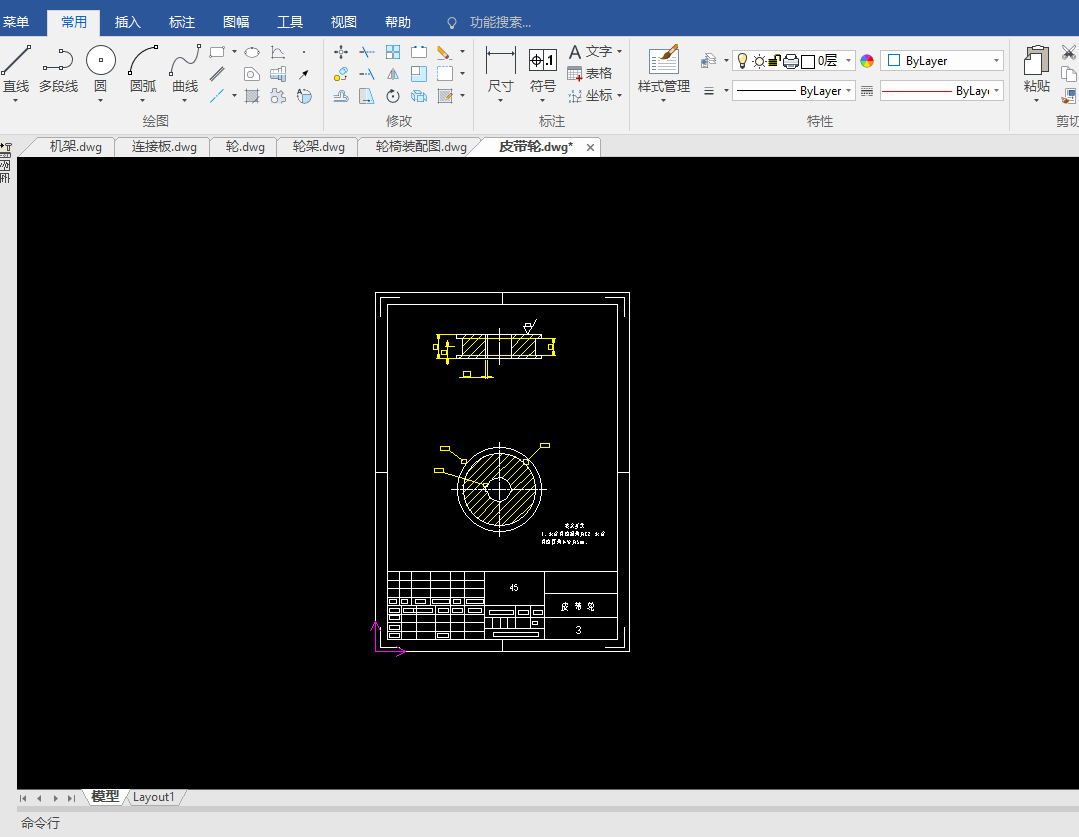
3.5.10 带轮的结构设计
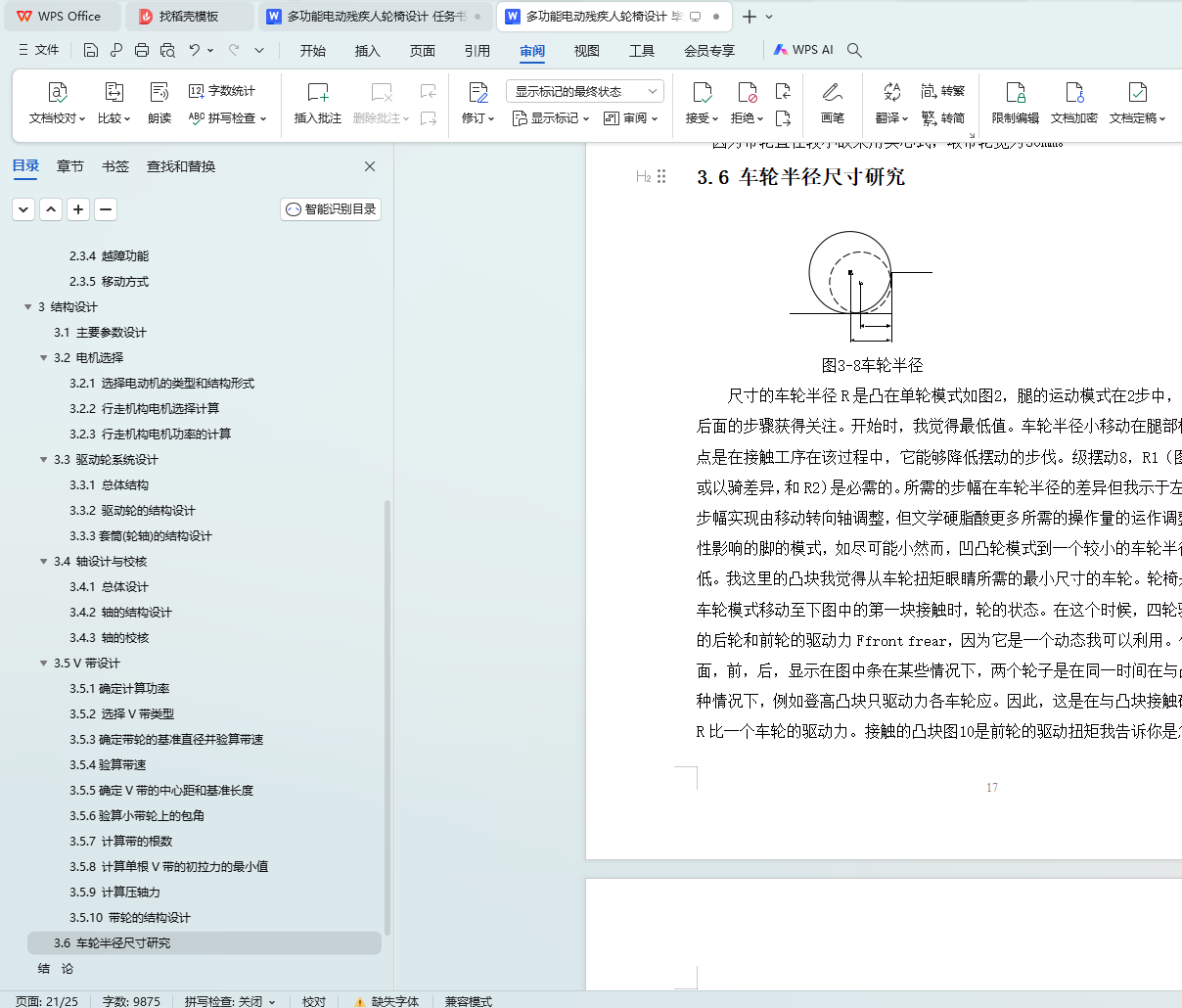
3.6 车轮半径尺寸研究
结 论
参考文献
致 谢