摘要
随着农业生产的快速发展,农业生产技术急需发展,各种人工的生产已经不能满足需要。除草机器人的研究,这其中机器人机械臂的运动学分析和图像识别又是比较关键的技术,以及除草方法的不断改进更使效率大大提高。相信随着我国对对农业机器人的高度重视,我国在农业除草机器人的研究领域会取得重大的突破。我国的农业生产能力家大大提高。
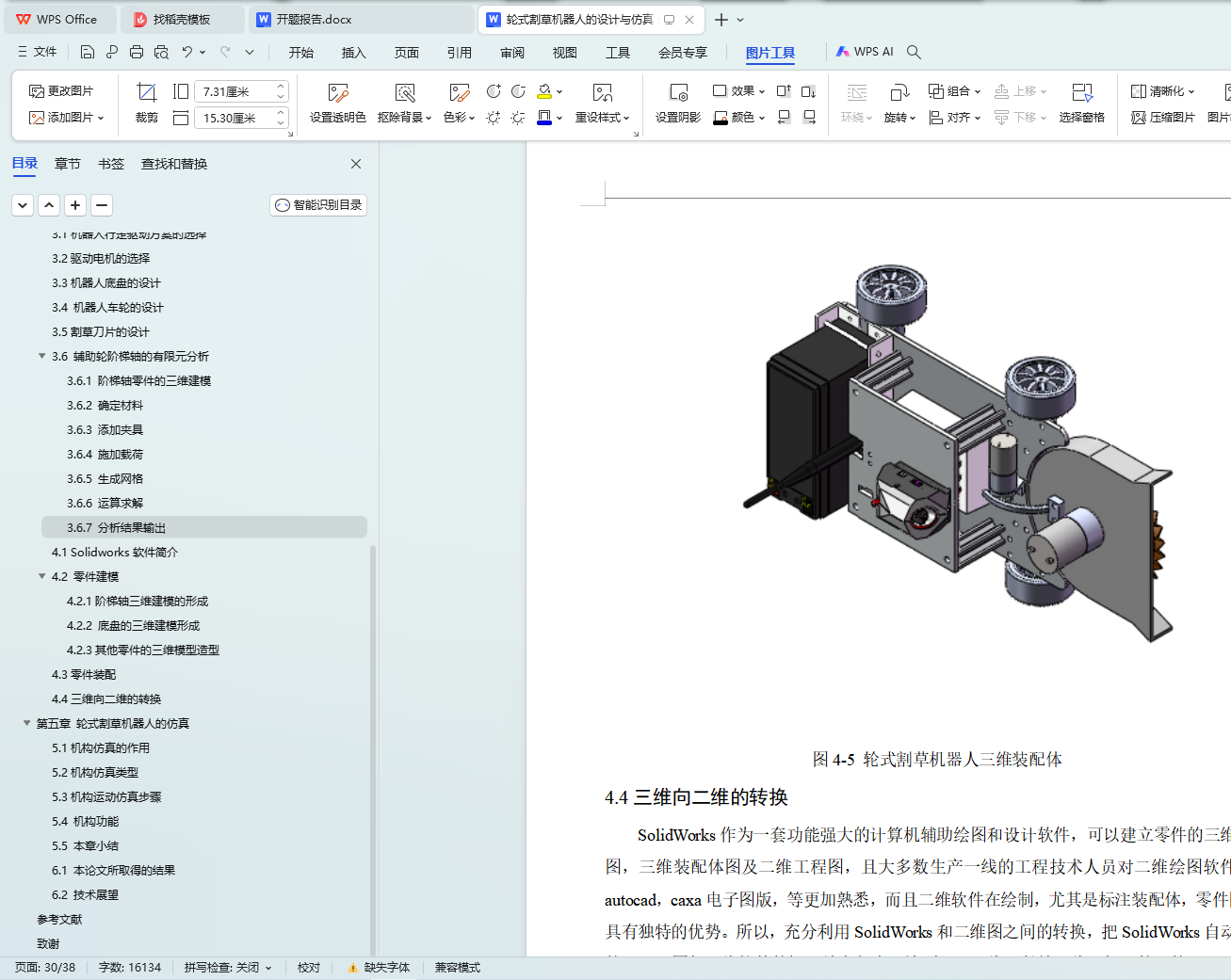
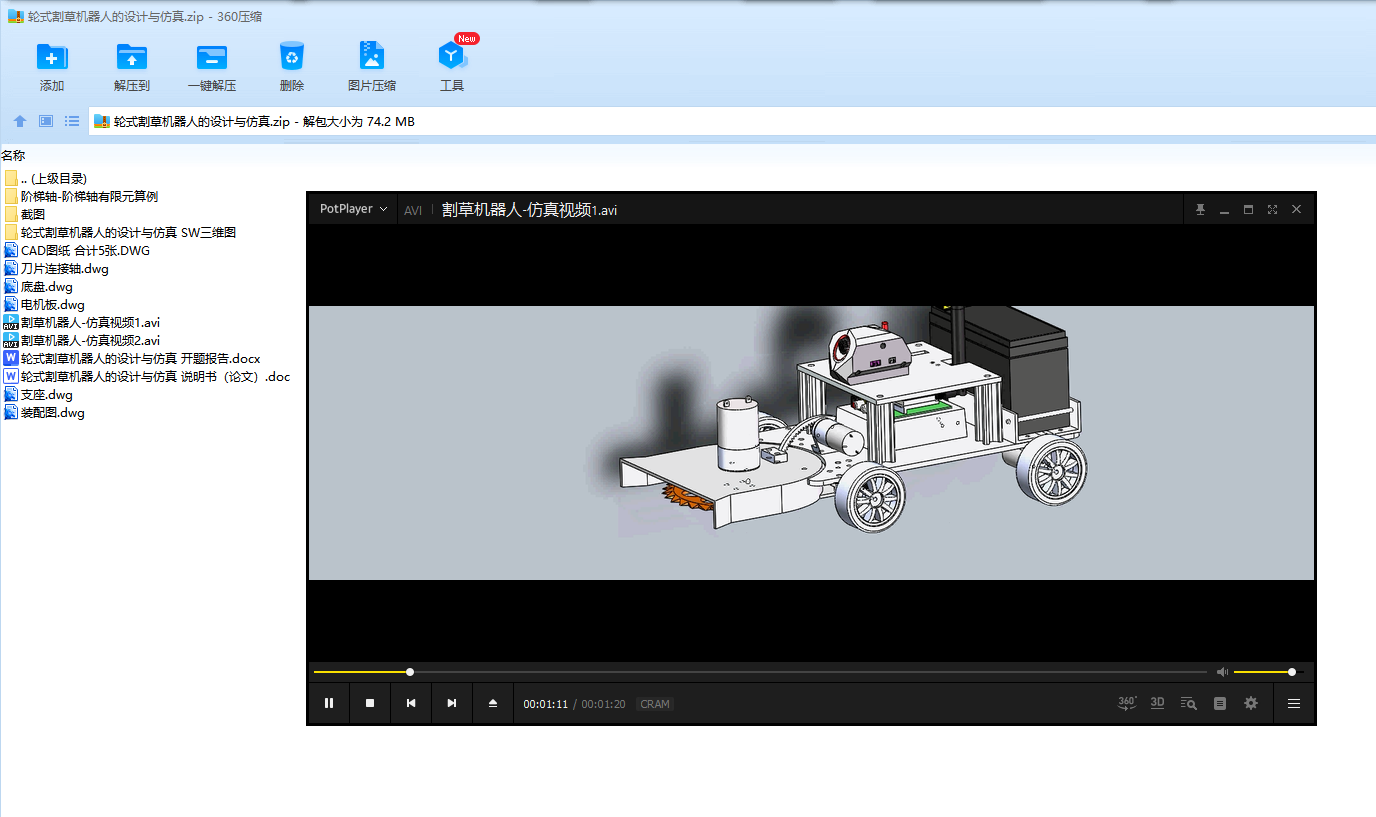
本文设计一款轮式割草机器人,其包括机器人行走机构、无线功能模块、除草机构、电源模块、视觉模块等组成。本轮式割草机器人利用其视觉处理模块可实现全自动自行移动除草工作,同时利用其无线功能模块可实现遥控除草工作。除草机构可上线摆动工作,适应不同的工况。本文首先确认除草机器人方案,完成关键部件设计计算,然后利用三维SOLIDWORKS完成轮式割草机器人的三维建模,并导出二维工程图,最后利用SOLIDWORKS对轮式割草机器人进行运动仿真。
关键词:轮式割草机器人,行走机构,视觉模块,运动仿真,三维建模
Abstract
With the rapid development of agricultural production, agricultural production technology need development, all kinds of artificial production has been unable to meet the needs. Study on weeding robot, the kinematics analysis and recognition robot manipulator is the key technology, continuous improvement and weeding method more improve the efficiency. I believe that with the country attaches great importance to the agricultural robot, in our country agricultural weeding robot research field will make breakthroughs. China's agricultural production capacity greatly increased home.
The design of a weeding robot in this paper, including the robot, wireless module, power supply module, weeding mechanism, visual module etc.. The weeding robot using the visual processing module can realize the automatic self moving weeding work, while using its wireless remote control module can realize the function of weeding. Weeding mechanism can work on-line swing, adapt to different working conditions. This paper first confirms the weeding robot program, complete the key components of the design calculation, 3D modeling and 3D SOLIDWORKS to complete the weeding robot, and the output of engineering drawing, finally using SOLIDWORKS motion simulation for weeding robot.
Keywords: weeding robot, walking mechanism, vision module, motion simulation, 3D modeling
目录
摘要
Abstract
第一章 引言
1.1 课题研究的目的及意义
1.1.1课题研究的目的
1.1.2 课题研究的意义
1.2轮式割草机器人国内外的现状
1.2.1国内的研究现状
1.2.2国外研究现状
1.3 国内外可移动机器人的发展现状
1.4 移动机器人的关键技术
1.5 课题设计思路
1.6 课题设计结构
第二章 轮式割草机器人的总体设计方案
2.1轮式割草机器人的组成及各部分关系概述
2.2 轮式割草机器人驱动方案的确认
2.2.1 液压驱动
2.2.2 气压驱动
2.2.3 电动机驱动
2.2.4 驱动方案的确认
2.3 总体方案拟定
第三章 轮式割草机器人整体结构的设计
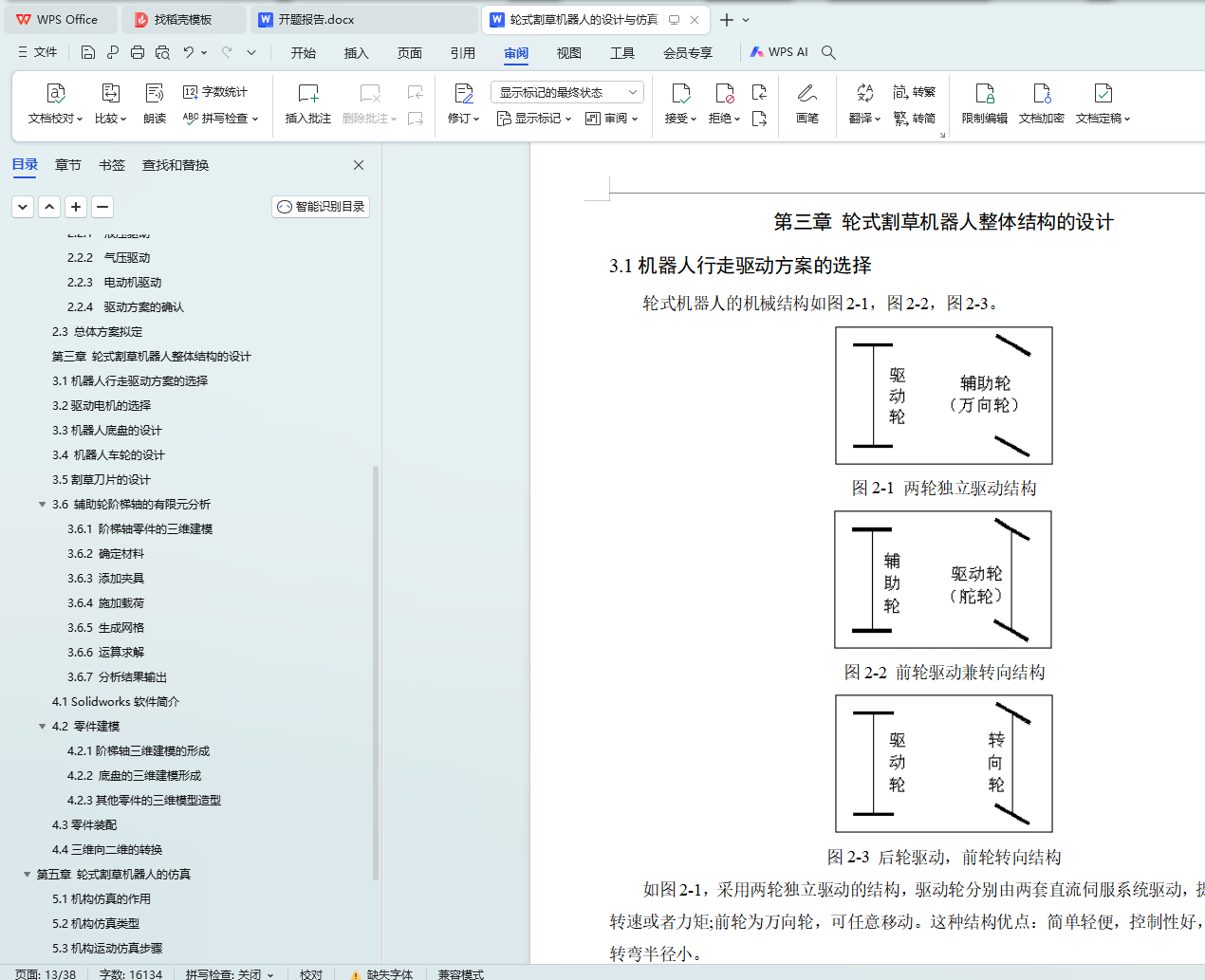
3.1机器人行走驱动方案的选择
3.2驱动电机的选择
3.3机器人底盘的设计
3.4 机器人车轮的设计
3.5割草刀片的设计
3.6 辅助轮阶梯轴的有限元分析
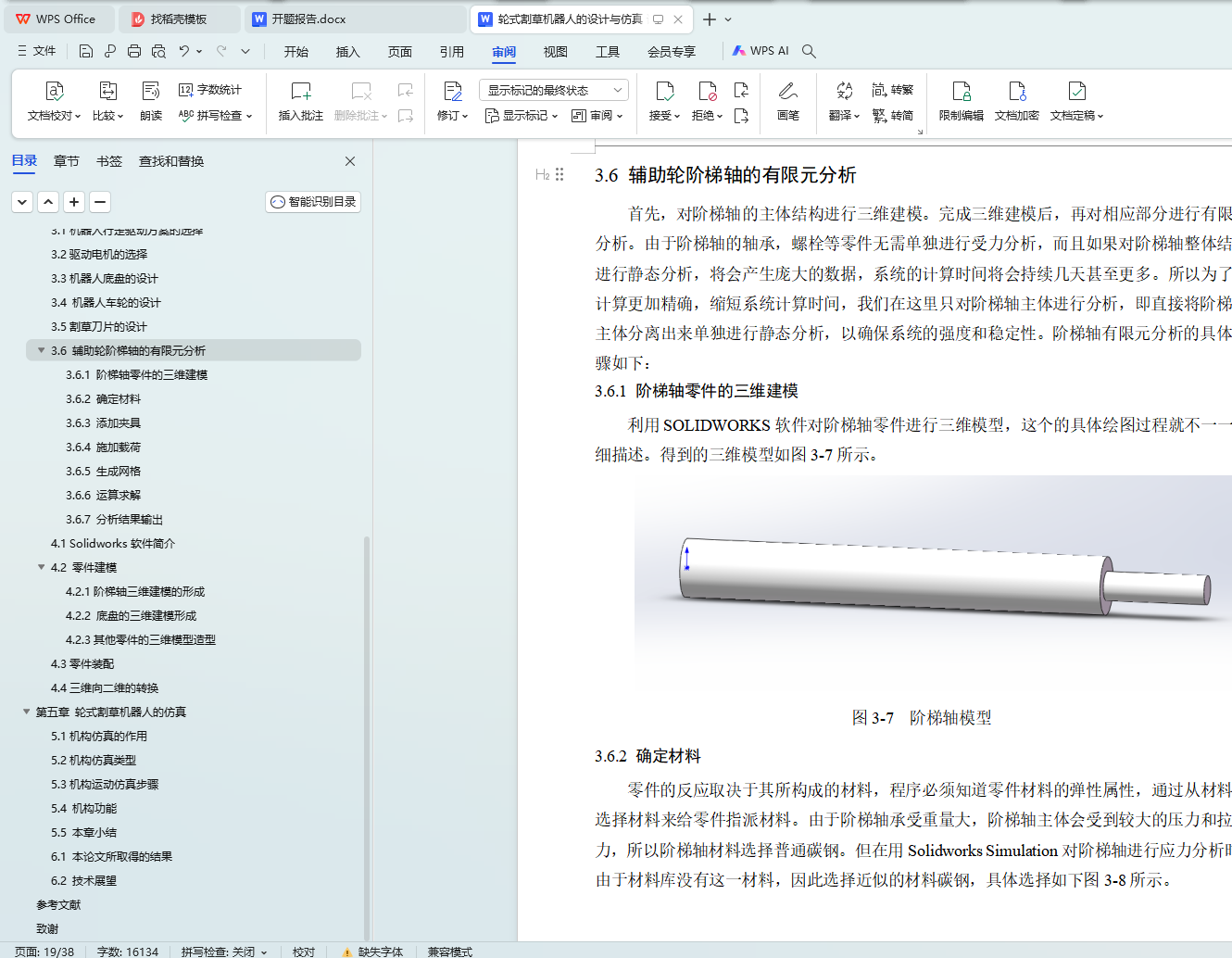
3.6.1 阶梯轴零件的三维建模
3.6.2 确定材料
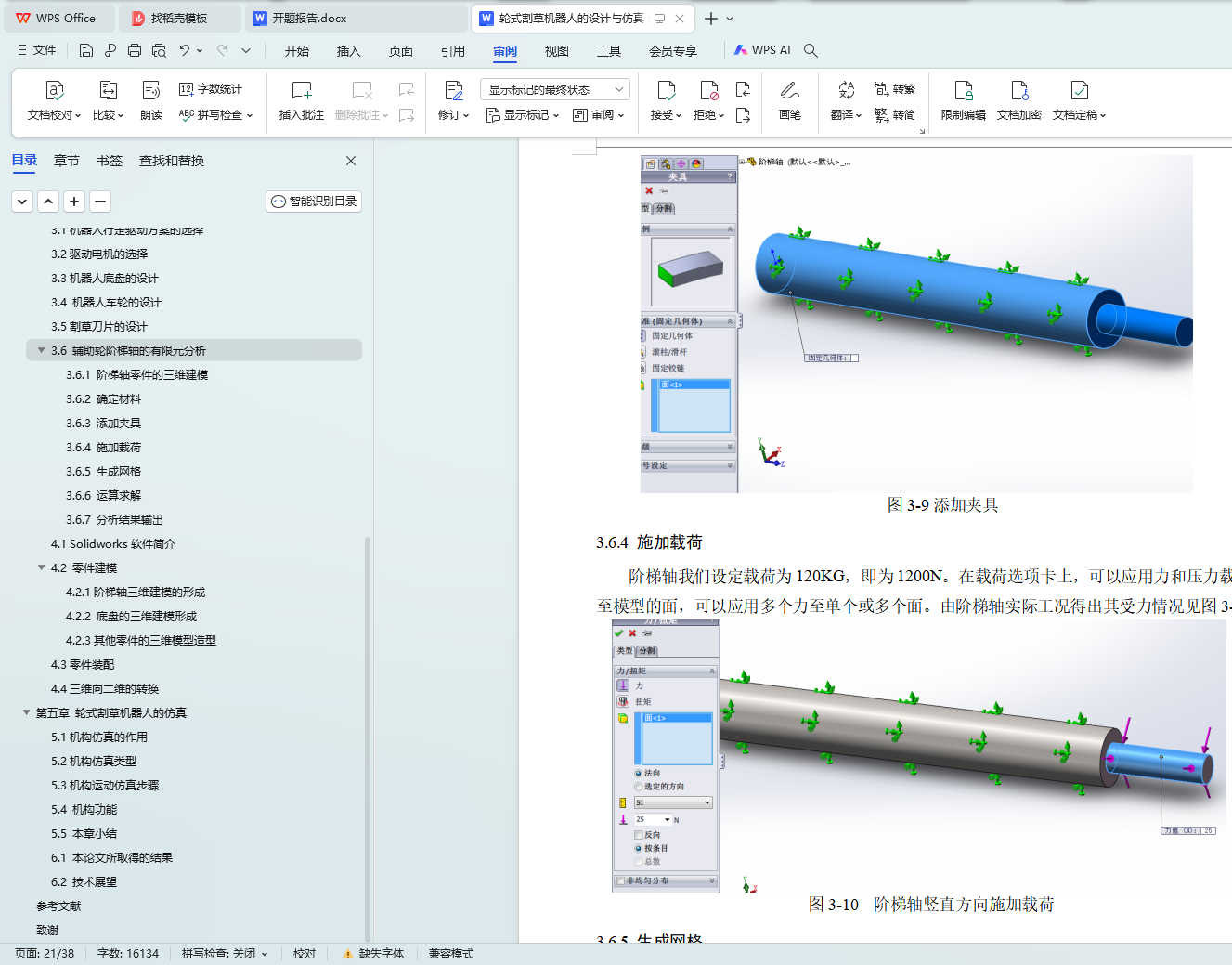
3.6.3 添加夹具
3.6.4 施加载荷
3.6.5 生成网格
3.6.6 运算求解
3.6.7 分析结果输出
第四章 轮式割草机器人三维造型的设计
4.1 Solidworks软件简介
4.2 零件建模
4.2.1阶梯轴三维建模的形成
4.2.2 底盘的三维建模形成
4.2.3其他零件的三维模型造型
4.3零件装配
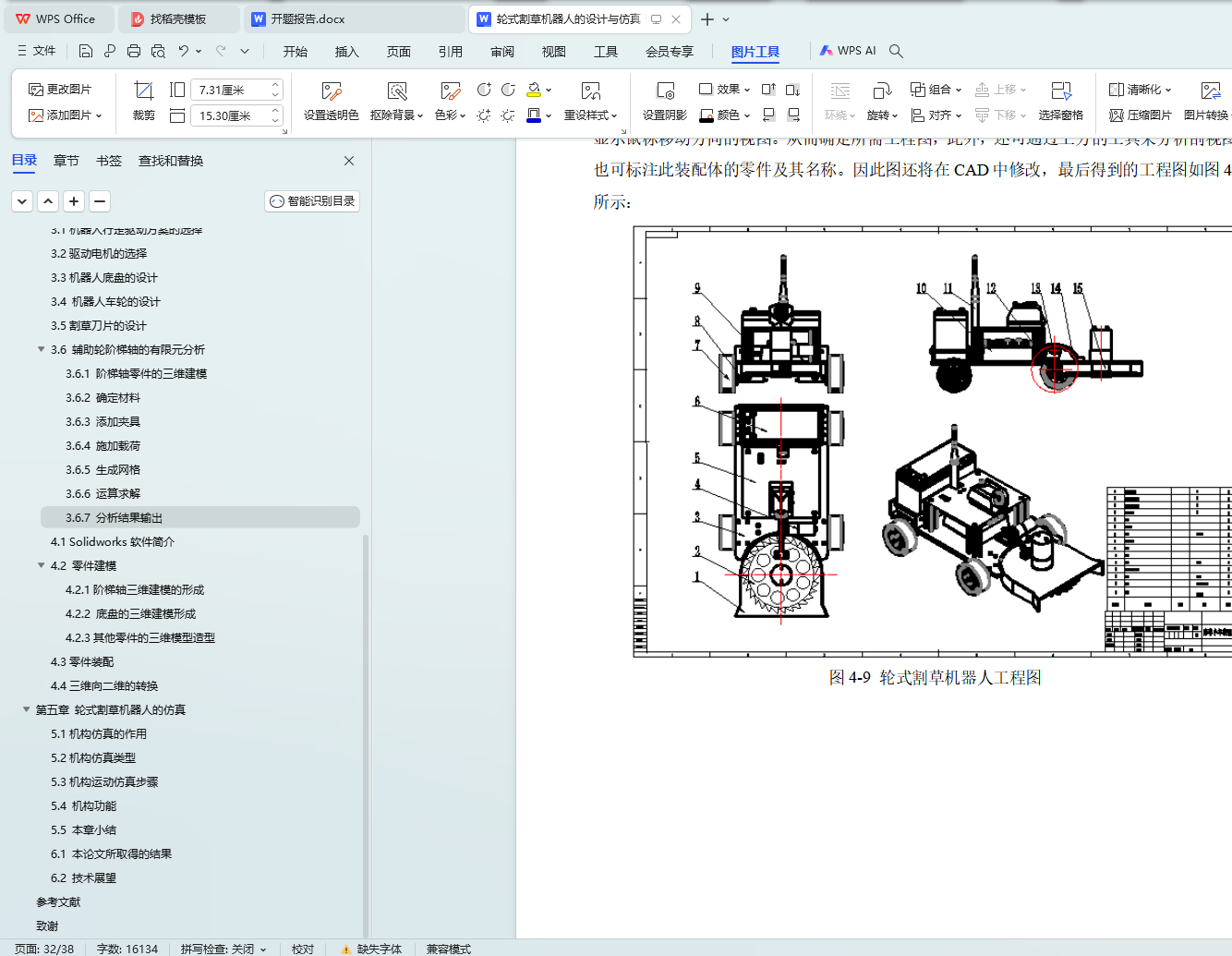
4.4三维向二维的转换
第五章 轮式割草机器人的仿真
5.1机构仿真的作用
5.2机构仿真类型
5.3机构运动仿真步骤
5.4 机构功能
5.5 本章小结
第六章 结论
6.1 本论文所取得的结果
6.2 技术展望
参考文献
致谢

(YT)8Q@EE3[Q.png)


UNZPNO0O]36A1K.png)









PF1TM1P@Y74N.png)
