摘 要
工业机械手又称通用自动机械手,是近几十年发展起来的一种高科技自动化生产设备。生产和应用机械手可以提高生产的自动化水平和劳动生产率,可以减轻劳动强度、保证产品质量、实现安全生产,尤其是在高温、高压、低温、低压、粉尘、易燃、易爆、有毒气和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。但是,通用工业机器手多为形状简单的夹钳式、托持式、吸附式等型式,其结构和抓握目标物的工作原理决定了其抓握功能局限性。因此,多关节机械手爪在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面,具有极强的功能和很高的通用性,所以成为现在机器人研究领域的焦点问题。
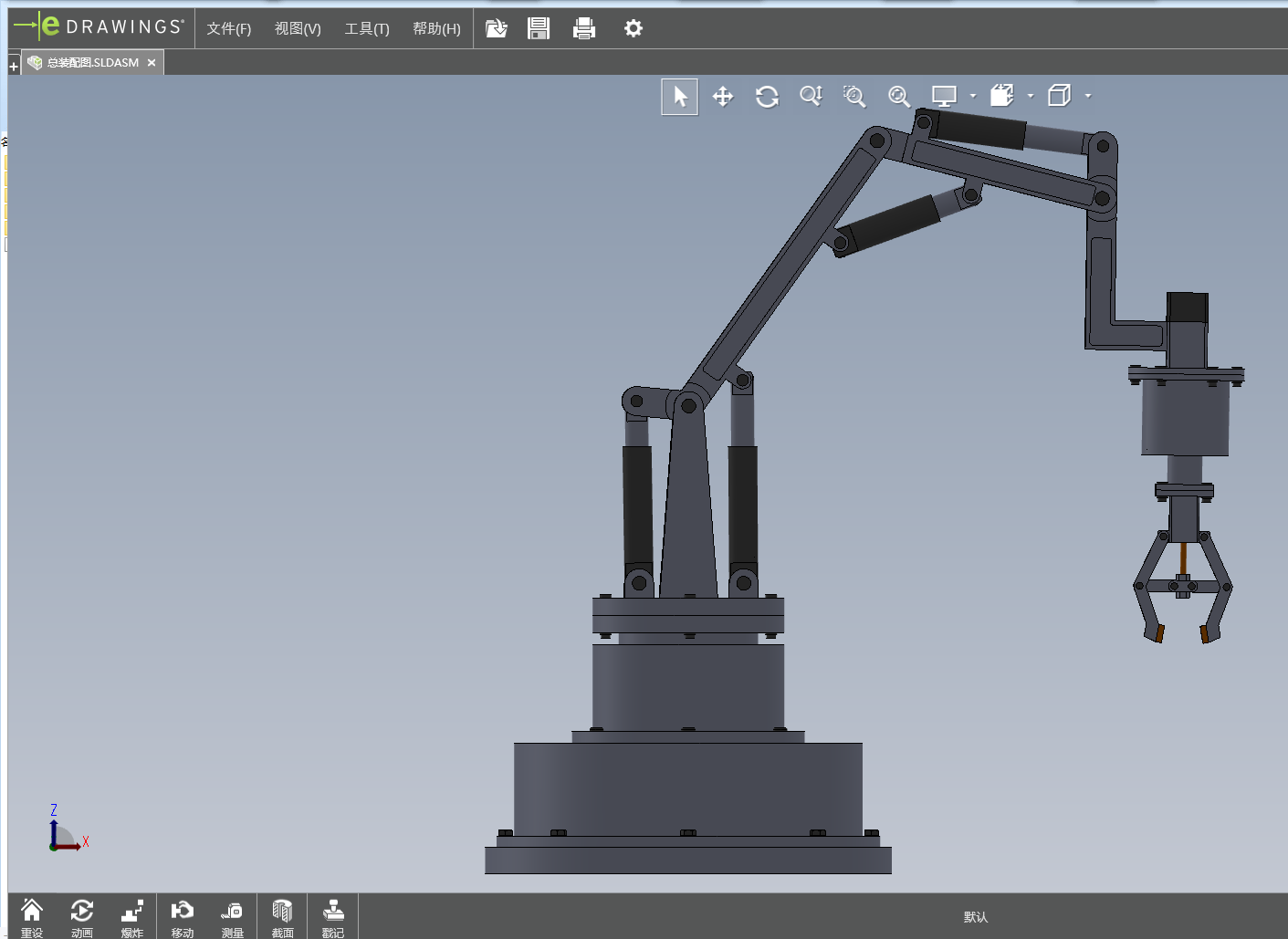
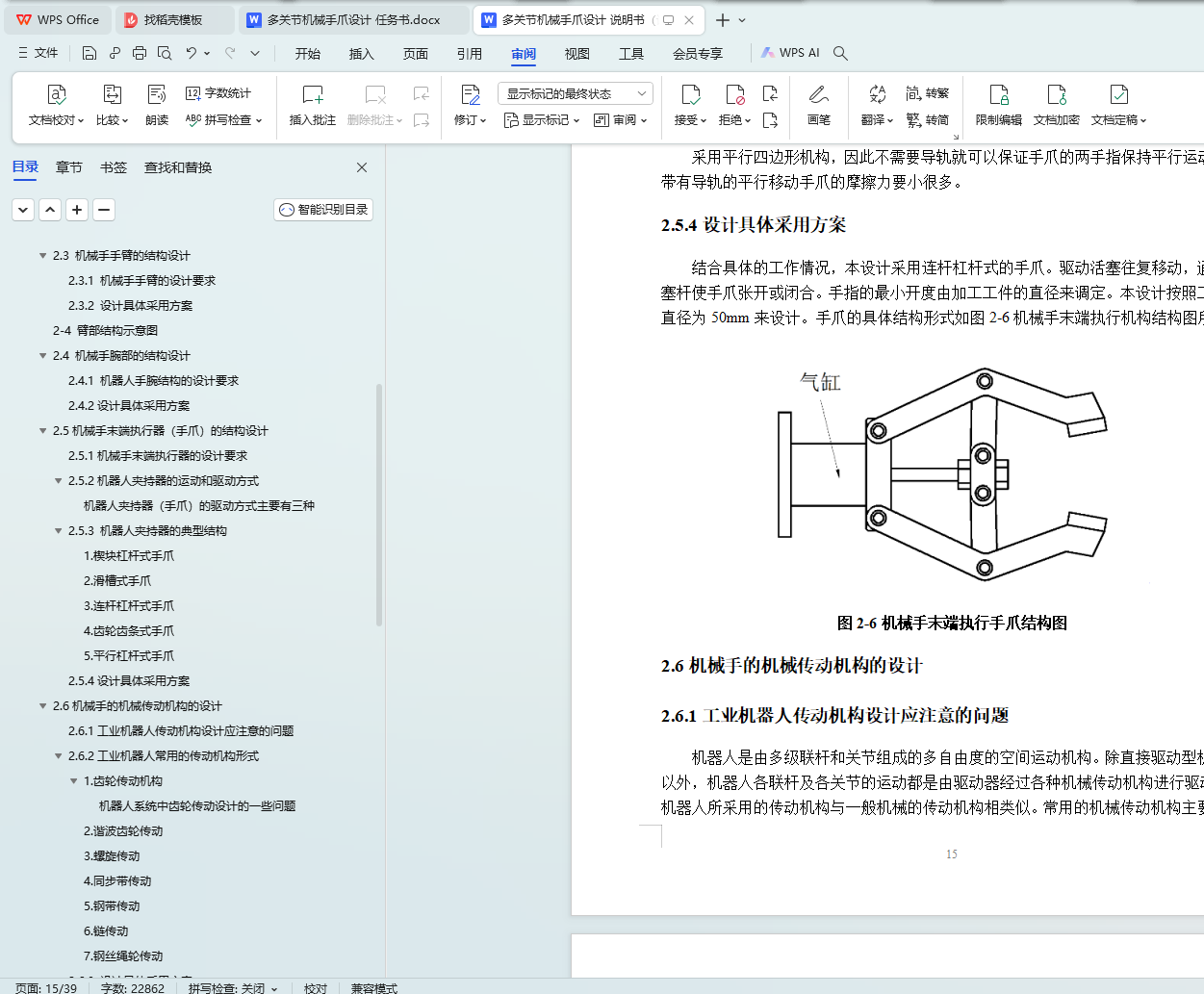
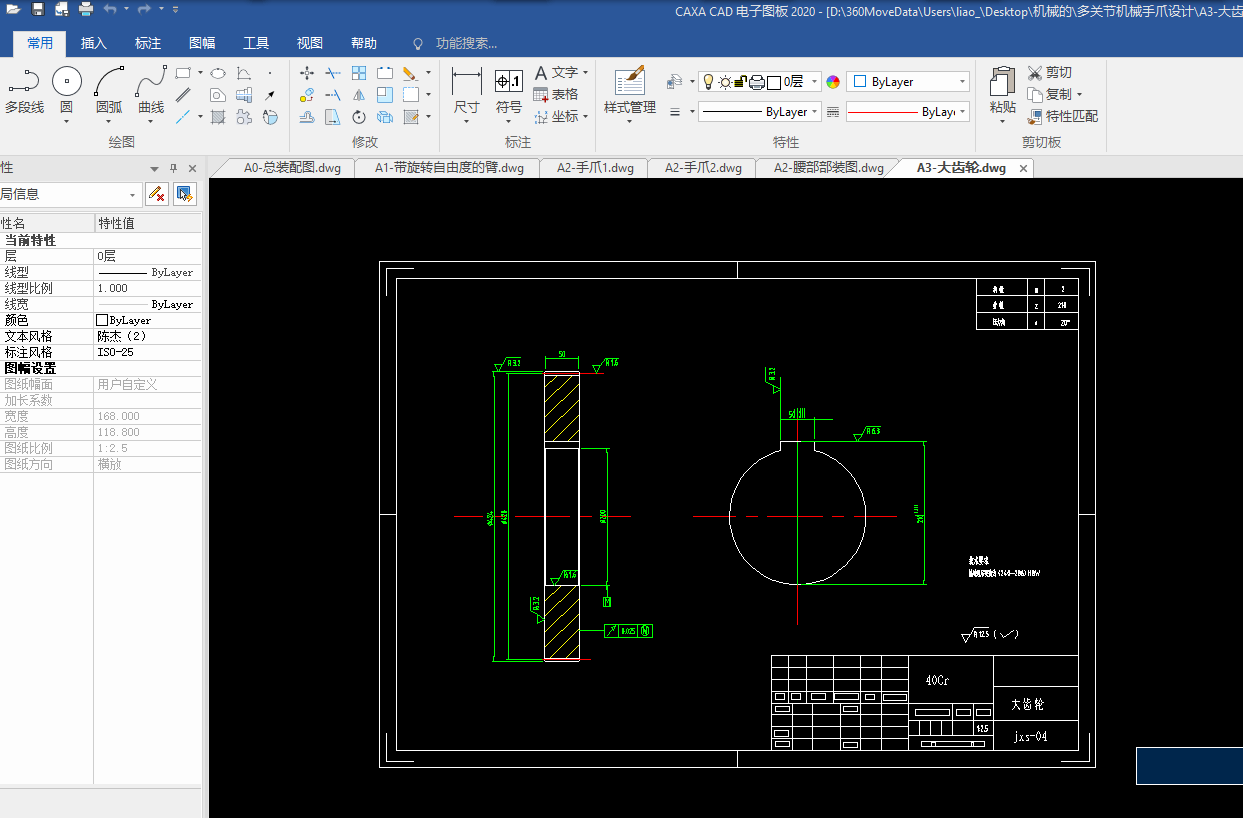
本论文针对多关节机械手爪的设计进行深入探讨,以实现对方形或柱状物体的自动夹紧和松料。论文首先概述了机械手爪的总体设计方案,并重点对其结构、机构和传动机构进行设计。设计过程中考虑了机械手爪的主要零部件,包括伺服电机、控制机械手升降的电缸、步进电机、减速器、十字支架连杆、牵引杆、动力杆及延伸滑槽和指尖等。论文详细介绍了每个零部件的功能和设计特点,并利用3D设计软件Solidworks建立了搬运机械手的整体模型。此外,论文还对关键零部件进行了强度及刚度校核,以确保机械手爪在工作中能够稳定、安全地运行。
关键词:多关节机械手爪;结构设计;传动机构;强度;刚度校核;Solidworks
Abstract
Industrial manipulator, also known as the general automatic manipulator, is a high-tech automatic production equipment developed in recent decades. Production and application of manipulator can improve the level of automation and labor productivity, can reduce labor intensity, ensure product quality, achieve safety in production, especially in high temperature, high pressure, low temperature, low temperature, dust, dust, flammable, explosive, gas and radioactive harsh environment, it instead of normal work, significance is more significant. However, the general industrial robotic hands are mostly simple shape clamp, support, adsorption and other types, its structure and the working principle of grasping the target determine the limitation of its grasping function. Therefore, multi-joint manipulator claw has strong function and high versatility in machining, stamping, casting, forging, welding, heat treatment, electroplating, painting, assembly, light industry and transportation industry, so it has become the focus of the field of robot research. In this paper, the design of the joint is discussed to realize automatic clamping and loosening of square or columnar objects.
The paper first outlines the overall design of the manipulator claw and focuses on its structure, mechanism and transmission mechanism. The main parts of the manipulator claw are considered in the design process, including servo motor, electric cylinder controlling the manipulator lift, stepper motor, reducer, cross support connecting rod, traction rod, power rod and extension chutes and fingertip, etc. This paper introduces the function and design characteristics of each component in detail, and establishes the overall model of the handling manipulator with the 3D design software Solidworks. In addition, the paper also checks the strength and stiffness of the key parts to ensure that the robot claw can operate stably and safely in the work. Key words: multi-joint manipulator claw; structural design; drive mechanism; strength; stiffness check; Solidworks
Keyways: Manipulator;PLC;Hydraulic servo control;Electrohydraulic system
目 录
摘 要
Abstract
第1章 绪论
1.1 选题背景
1.2 设计目的
1.3 国内外研究现状和趋势
1.4 设计原则
第2章 设计方案的论证
2.1机械手的总体设计
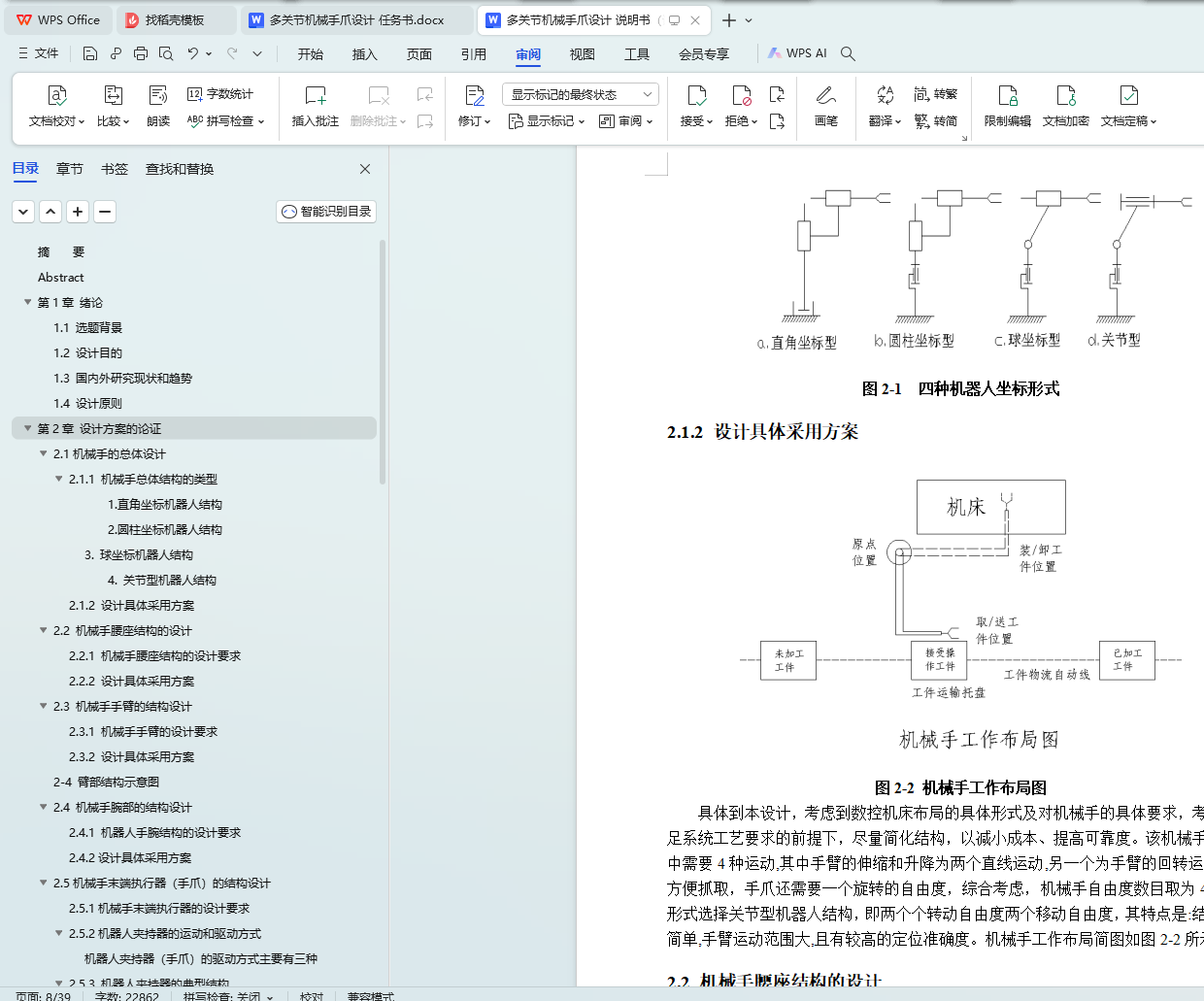
2.1.1 机械手总体结构的类型
2.1.2 设计具体采用方案
2.2 机械手腰座结构的设计
2.2.1 机械手腰座结构的设计要求
2.2.2 设计具体采用方案
2.3 机械手手臂的结构设计
2.3.1 机械手手臂的设计要求
2.3.2 设计具体采用方案
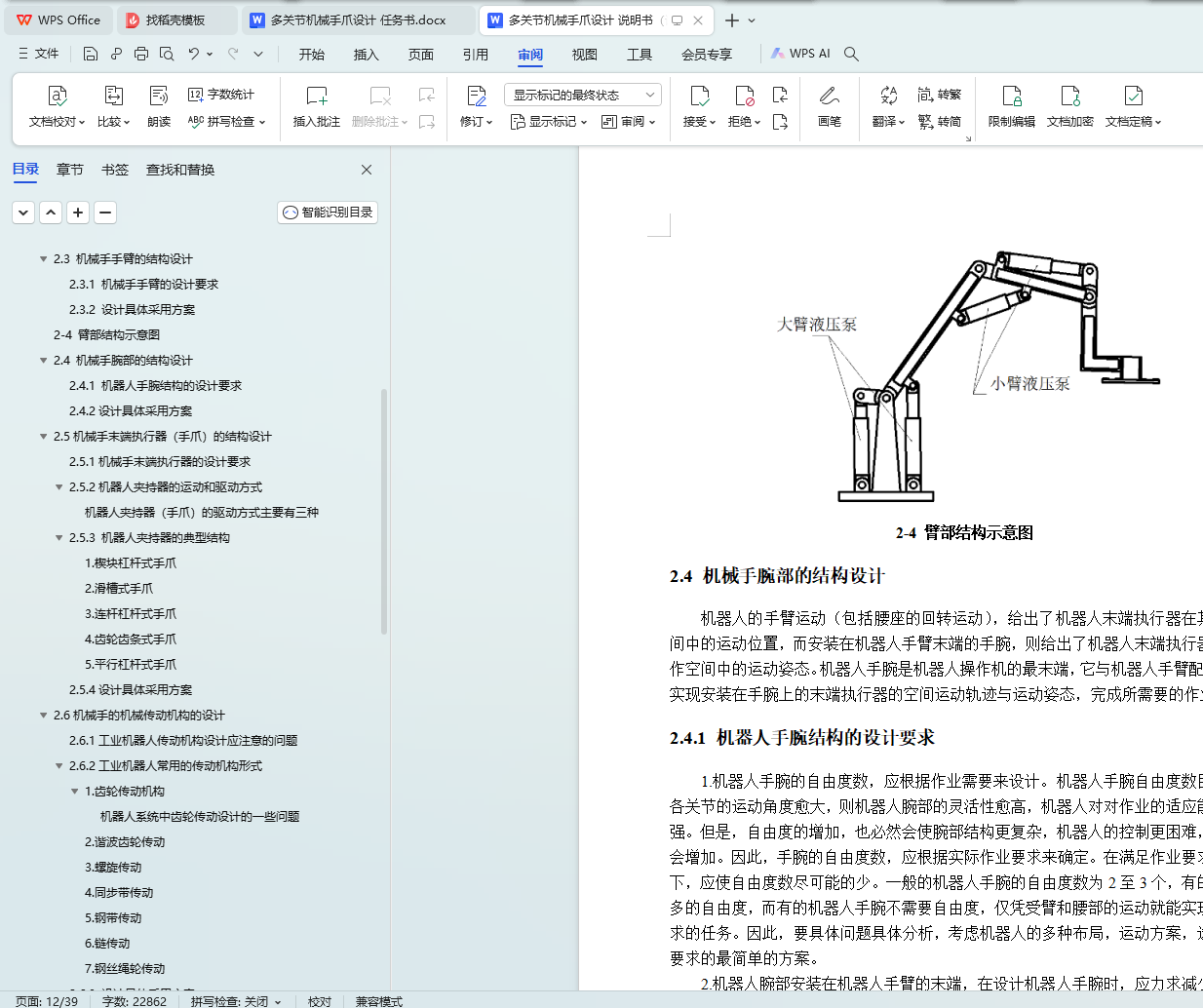
2-4 臂部结构示意图
2.4 机械手腕部的结构设计
2.4.1 机器人手腕结构的设计要求
2.4.2设计具体采用方案
2.5机械手末端执行器(手爪)的结构设计
2.5.1机械手末端执行器的设计要求
2.5.2机器人夹持器的运动和驱动方式
2.5.3 机器人夹持器的典型结构
2.5.4设计具体采用方案
2.6机械手的机械传动机构的设计
2.6.1工业机器人传动机构设计应注意的问题
2.6.2工业机器人常用的传动机构形式
2.6.3 设计具体采用方案
2.7机械手驱动系统的设计
2.7.1机器人各类驱动系统的特点
2.7.2工业机器人驱动系统的选择原则
2.7.3机器人液压驱动系统
2.7.4 机器人气动驱动系统
2.7.5机器人电动驱动系统
2.7.6设计具体采用方案
2.8 机器人手臂的平衡机构设计
2.8.1机器人平衡机构的形式
2.8.2设计具体采用的方案
第3章 理论分析和设计计算
3.1液压传动系统设计计算
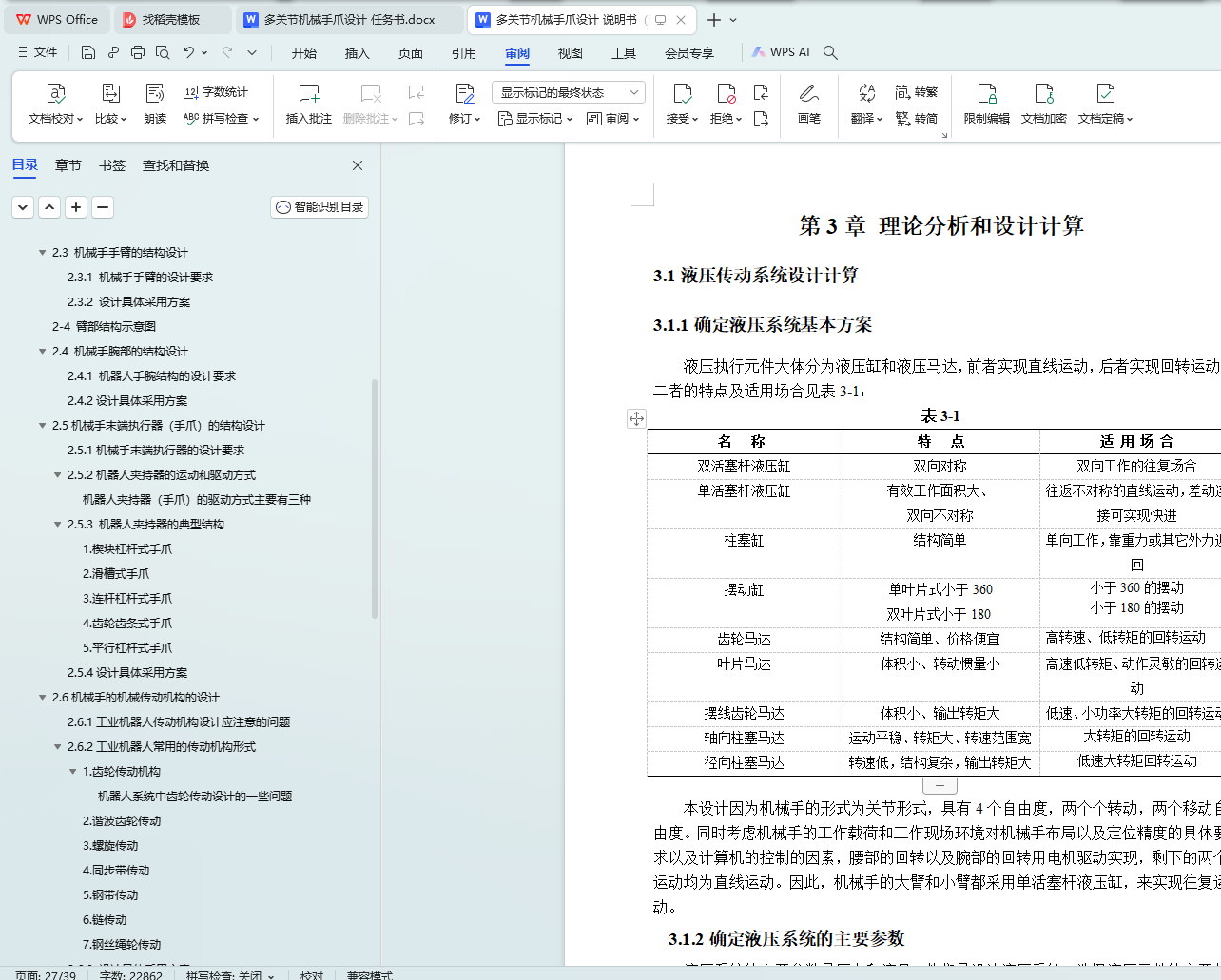
3.1.1确定液压系统基本方案
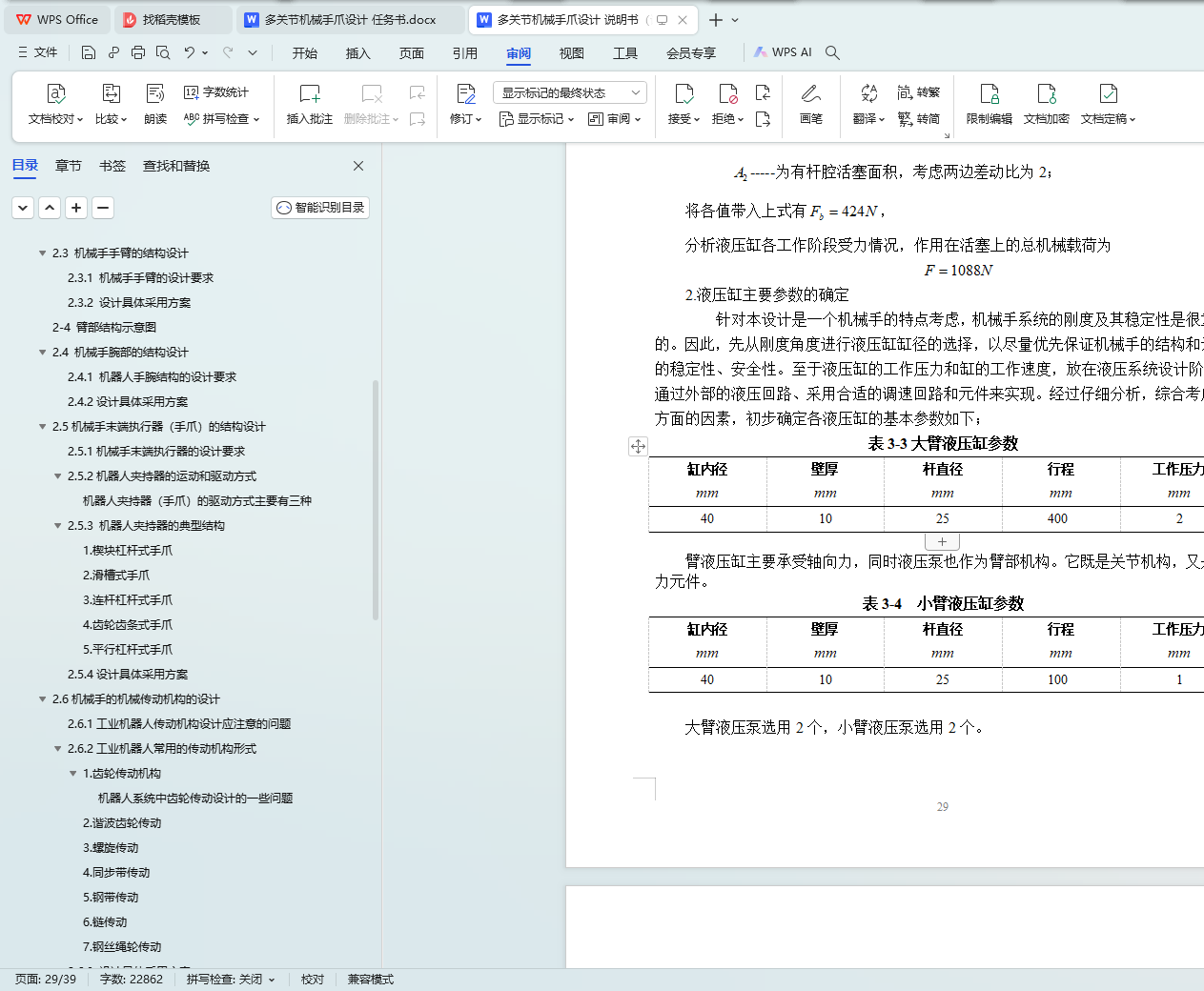
3.1.2确定液压系统的主要参数
3.1.3计算和选择液压元件
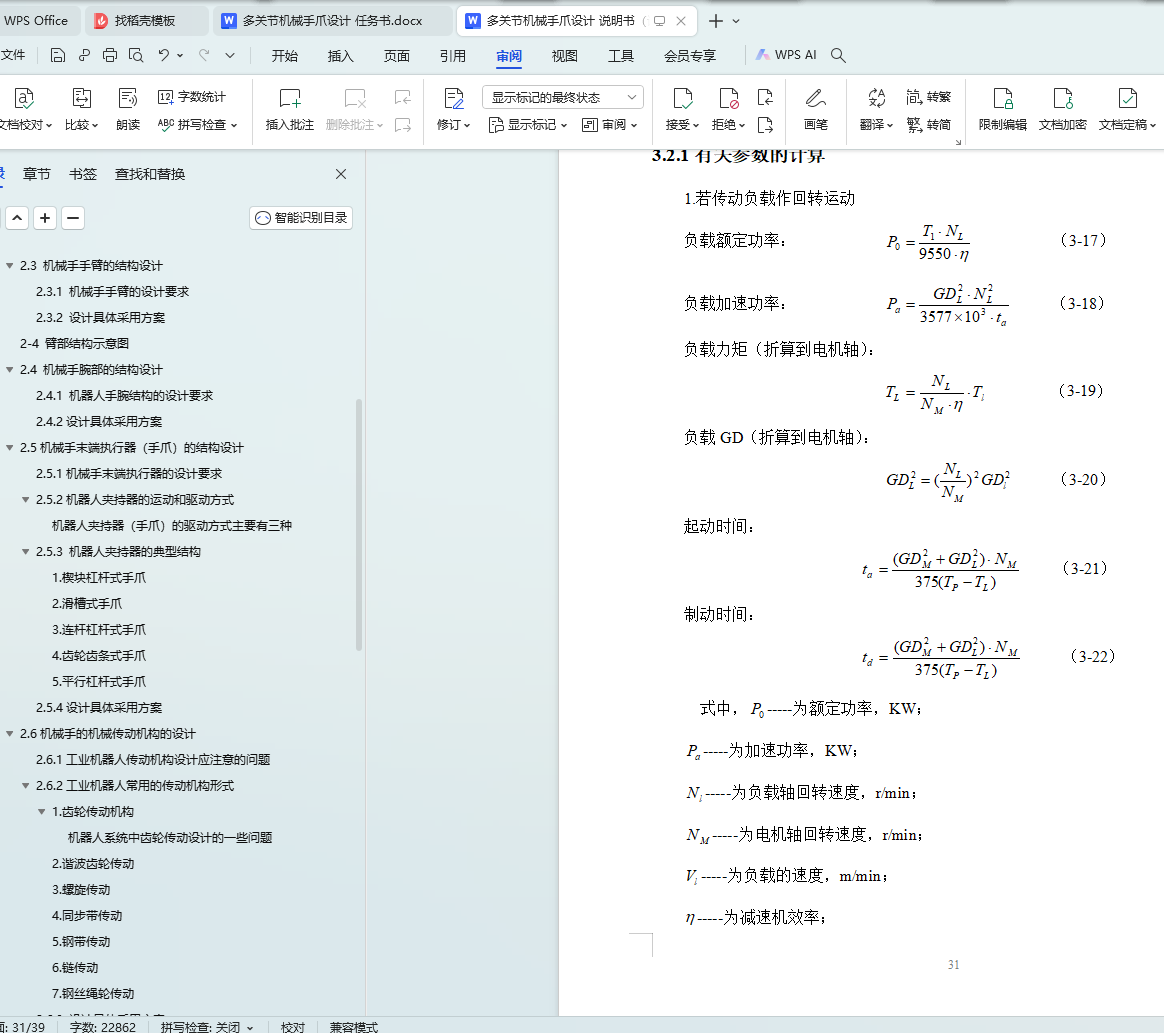
3.2 电机选型有关参数计算
3.2.1有关参数的计算
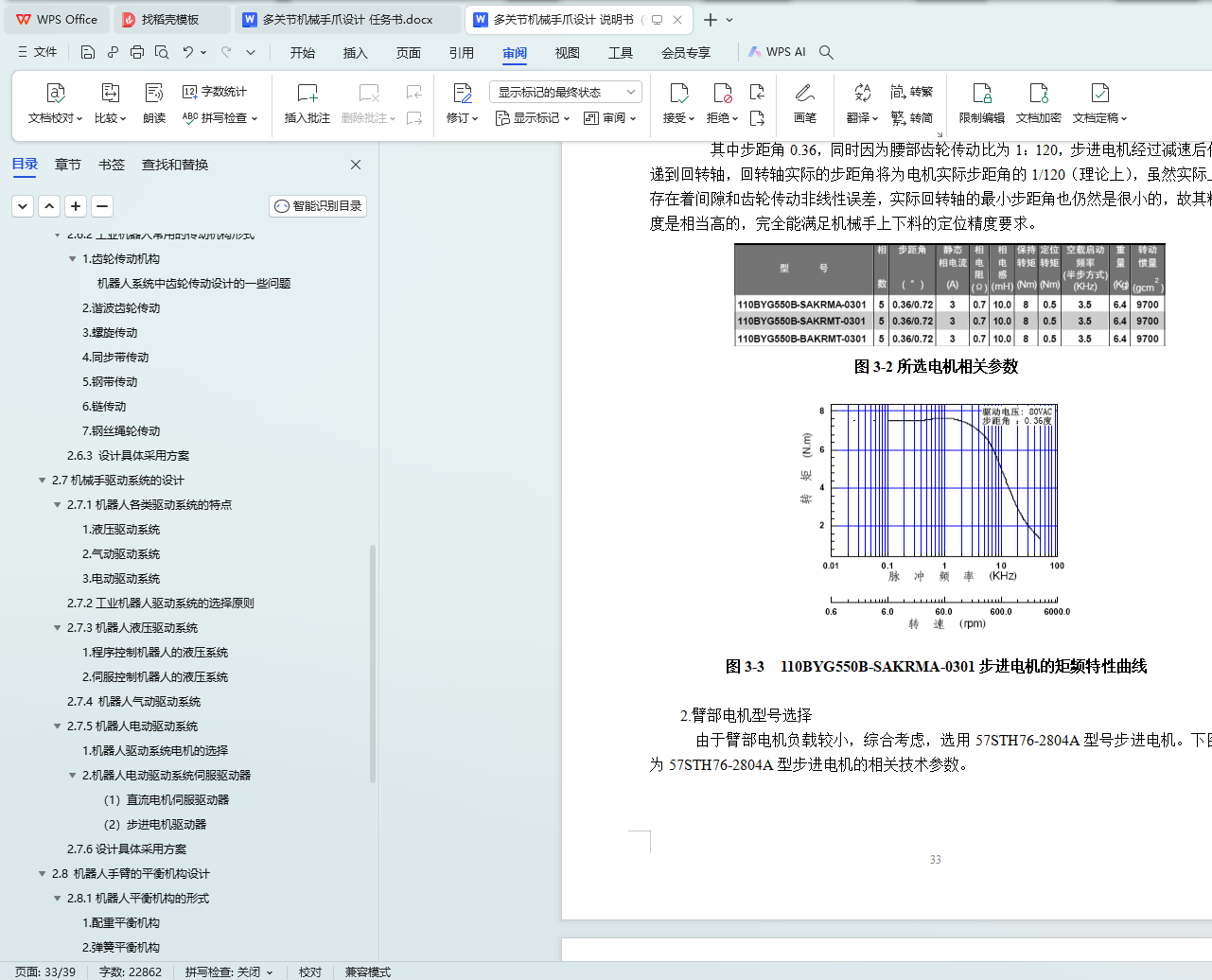
3.2.2电机型号的选择
结 论
参考文献
致 谢