摘要
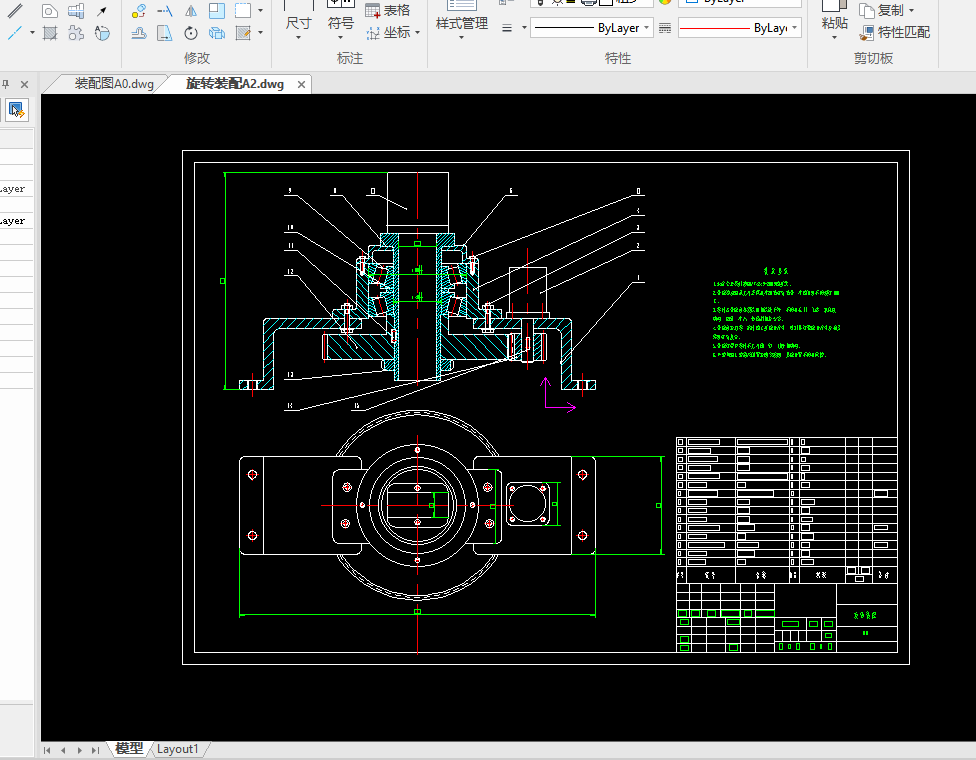
由于工业机器人具有优越的机动性和灵活性而倍受青睐,并在许多场合投入实际使用。本课题对智能防疫巡检机器人的应用环境、动作要求及功能进行深入的分析与研究,设计出满足实际需求的智能防疫巡检机器人,并对其进行结构设计,绘制智能防疫巡检机器人总装图及各重要部件图。实现可以在轨道上移动,下方搭载有升降云台,外壳坚固美观,装有星光摄像头,可以对房内和外场的环境进行全方位、长距离、多目标实时监测的功能。
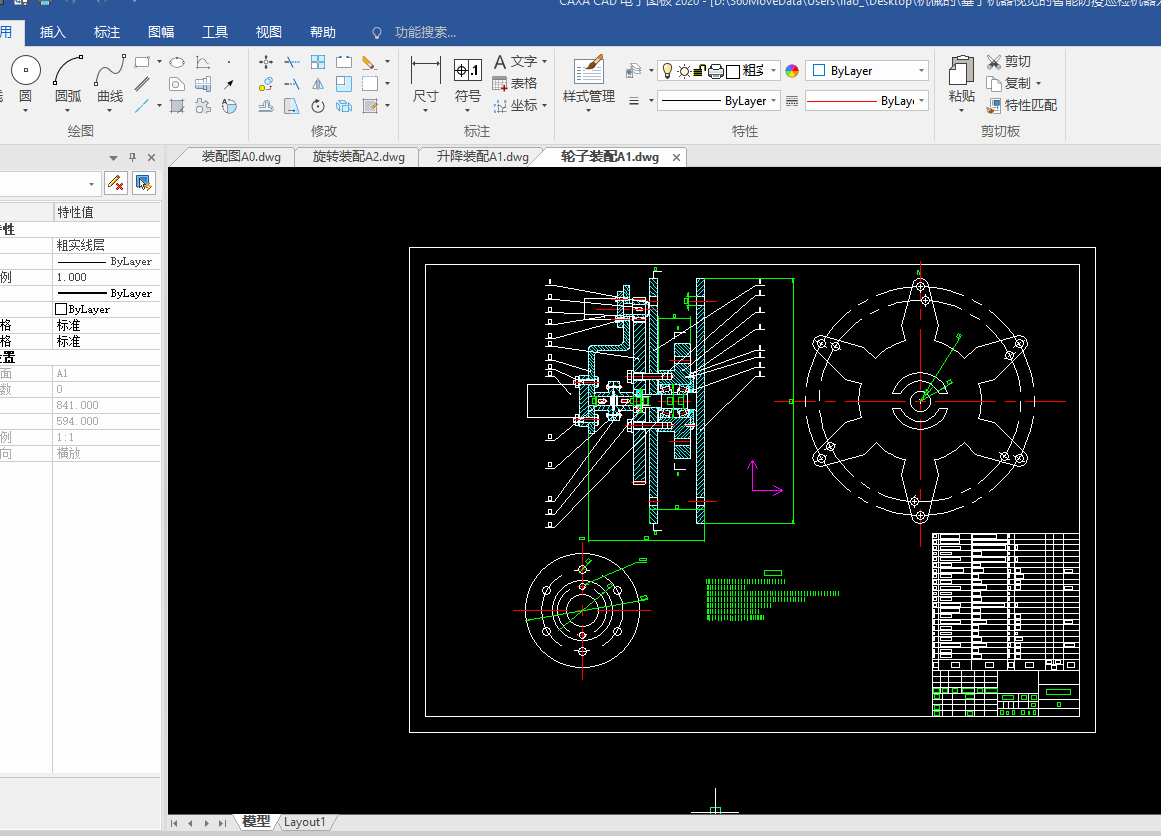
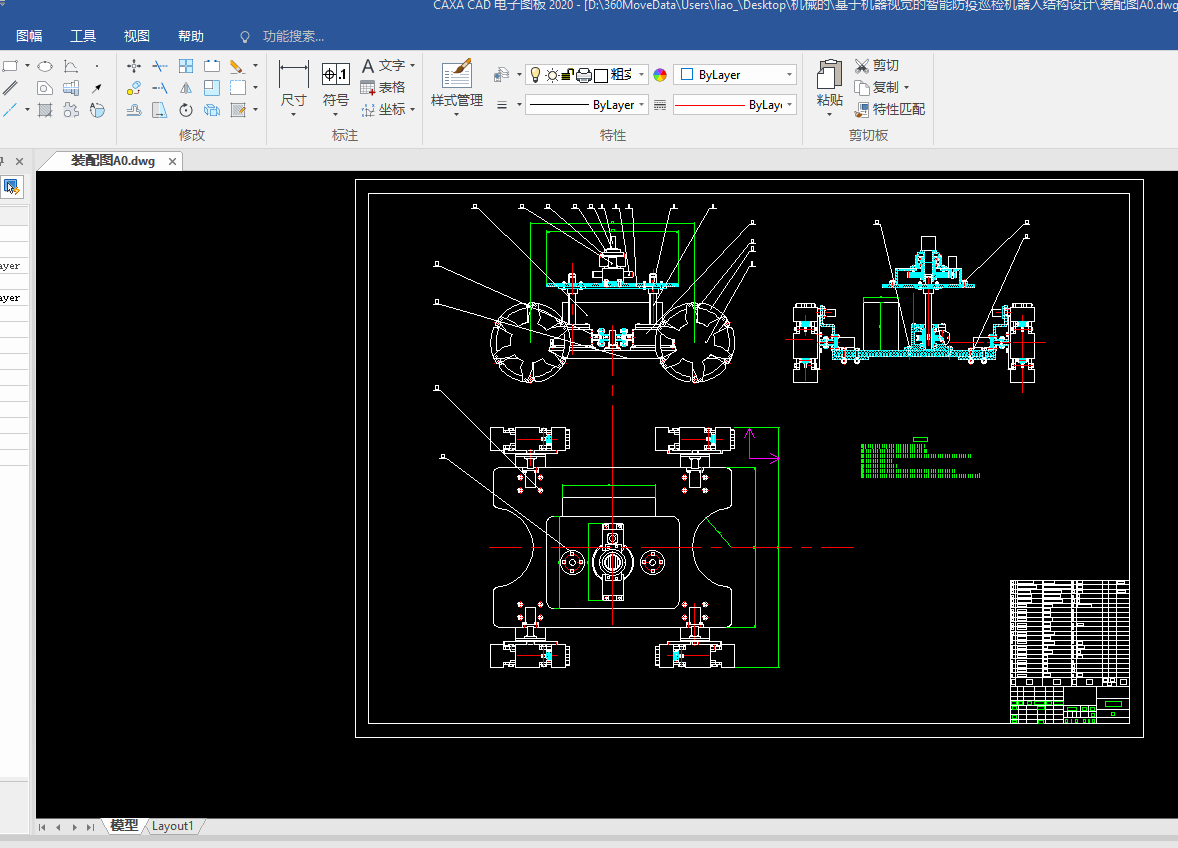
本文设计了一种基于机器视觉的智能防疫巡检机器人。该机器人主要应用于疫情期间,对公共场所、医院等地点进行巡检和消毒等工作。本文首先分析了智能防疫巡检机器人的工作环境及要求,并对其进行了功能分析和总体方案设计。然后,详细介绍了机器人的总体结构设计和各部件的详细设计,包括机械结构、运动系统、控制系统、机器视觉系统、消毒系统等。最后,利用绘图软件绘制了智能防疫巡检机器人的总装图及重要部件图。该机器人的设计可提高巡检和消毒工作的效率和质量,降低疫情传播的风险。
关键词:机器视觉;智能防疫巡检机器人;结构设计;绘图软件;疫情期间
Abstract
Industrial robots are favored because of their superior mobility and flexibility, and they are put into practical use on many occasions. This topic conducts in-depth analysis and research on the application environment, action requirements and functions of the intelligent epidemic prevention inspection robot, designs the intelligent epidemic prevention inspection robot to meet the actual needs, and carries out the structural design, and draws the final assembly map and the important components of the intelligent epidemic prevention inspection robot. It can be moved on the track, equipped with a lifting head, solid and beautiful shell, equipped with starlight camera, can carry out all-round, long-distance, multi-target real-time monitoring of the inside and outside the environment.
This paper designed an intelligent epidemic prevention inspection robot based on machine vision. The robot is mainly used to patrol and disinfect public places, hospitals and other places during the epidemic period. This paper first analyzes the working environment and requirements of intelligent epidemic prevention inspection robot, and conducts functional analysis and overall scheme design. Then, the overall structural design of the robot and the detailed design of each component, including mechanical structure, motion system, control system, machine vision system, disinfection system and so on. Finally, the drawing software draws the final assembly map and the important component map of the intelligent epidemic prevention inspection robot. The robot is designed to improve the efficiency and quality of inspection and disinfection work, and reduce the risk of epidemic spread.
Key words: machine vision; intelligent epidemic prevention inspection robot; structure design; drawing software; during epidemic
目录
摘要
1 绪论
1.1 课题研究意义
1.2 智能防疫机器人的现状及发展
1.3 移动机器人技术的研究现状
1.4 智能防疫巡检机器人软件研究现状
1.5 多传感器融合研究现状
1.6 论文主要内容及结构安排
2 智能防疫巡检机器人系统需求分析与整体方案设计
2.1 系统设计的需求分析
2.1.1 功能需求
2.1.2 性能需求
2.2 智能防疫巡检机器人系统方案设计
2.2.1 整体方案
2.2.2 软件系统方案
2.2.3 通信方案选择
2.2.4 导航定位方案选择
2.2.5 避障技术
2.3 硬件选型分析
2.3.1 控制模块硬件选型
2.3.2 传感器选型
2.3.3 传感器的分类配置
2.4 本章小结
3 智能智能防疫巡检机器人硬件结构
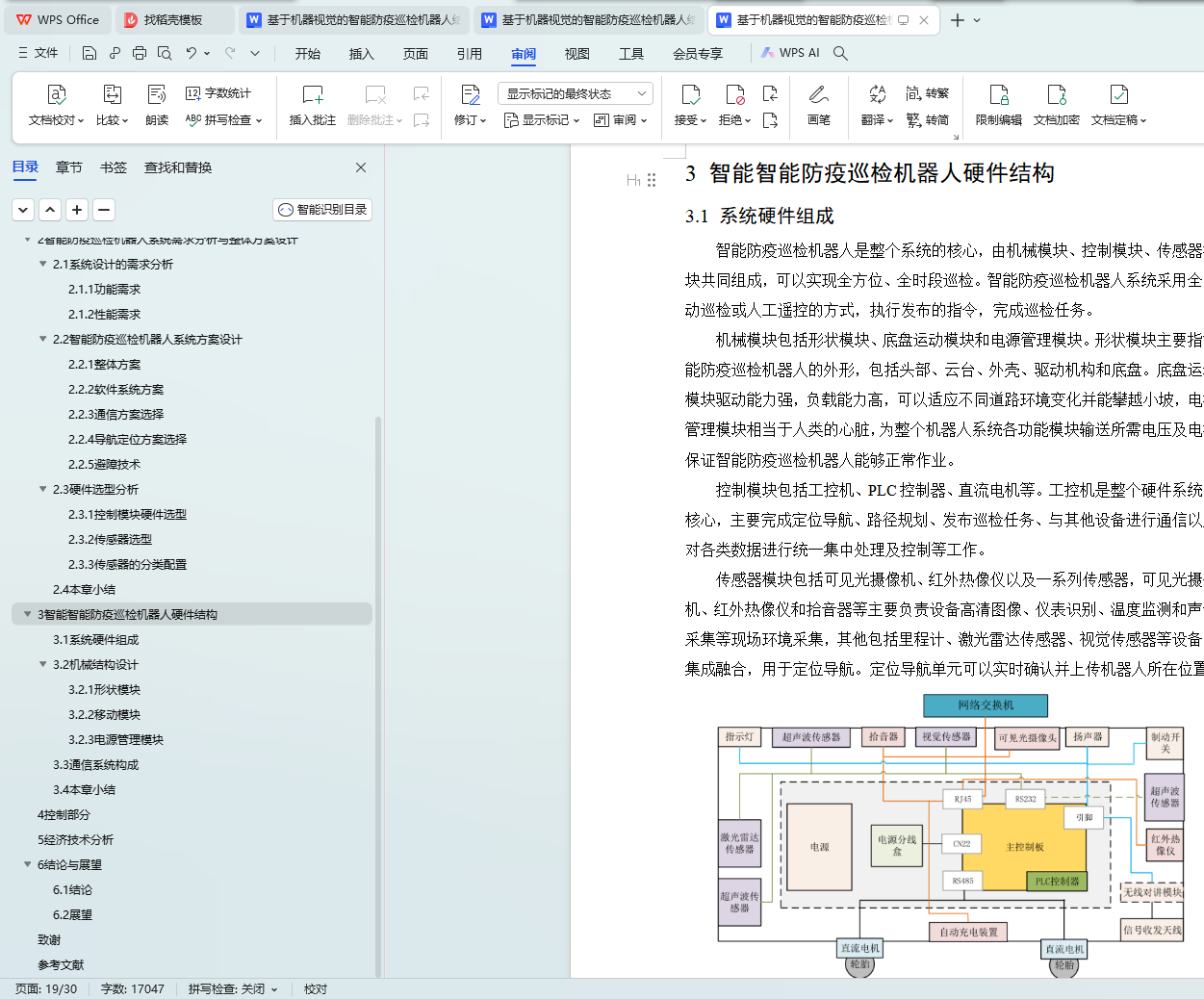
3.1 系统硬件组成
3.2 机械结构设计
3.2.1 形状模块
3.2.2 移动模块
3.2.3 电源管理模块
3.3 通信系统构成
3.4 本章小结
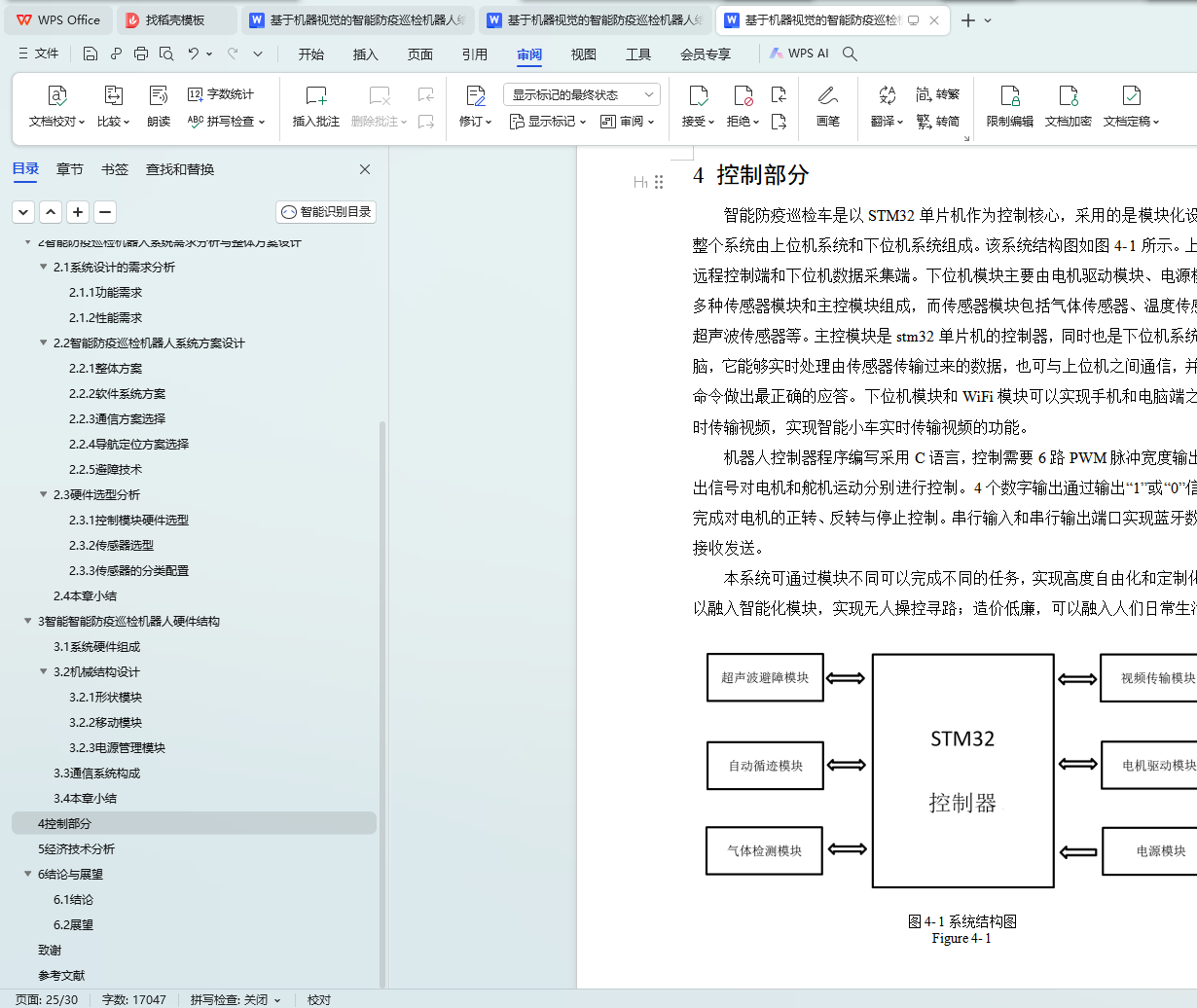
4 控制部分
5经济技术分析
6 结论与展望
6.1 结论
6.2 展望
致谢
参考文献