摘 要
随着现代工业的快速发展,自动化和智能化已成为制造业的重要发展方向。码垛机器人作为自动化生产线的重要组成部分,广泛应用于各种行业。中纤板作为一种常见的板材,其码垛作业同样需要实现自动化。本文旨在设计一种中纤板码垛机器人的本体结构,以满足给定中纤板自动冲床流水线码垛机器人的各项基本技术指标,同时完成抓取、旋转、码垛等功能。在码垛机器人的设计过程中,需要考虑到机器人的稳定性、精度和灵活性等方面。驱动方式和传动方式的选择直接影响到机器人的性能。因此,本文将确定码垛机器人的驱动方式和传动方式,以提高机器人的性能。
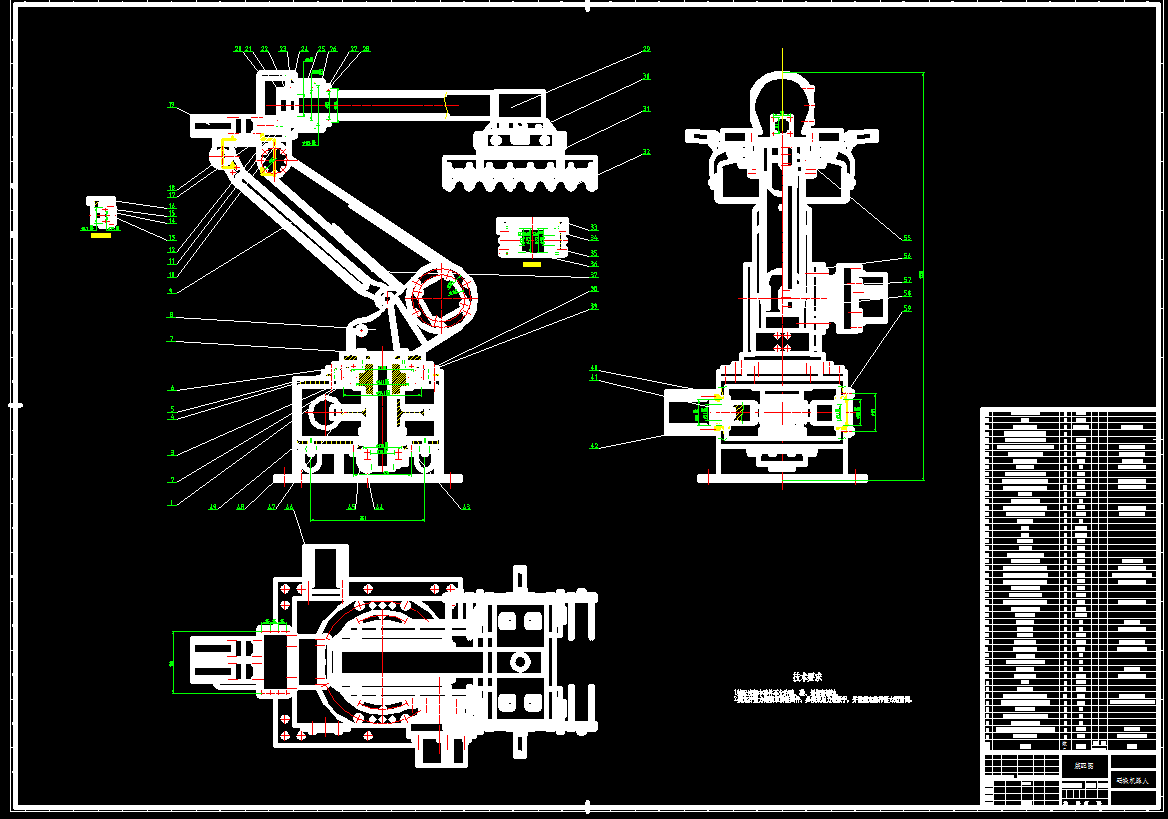
本文的研究成果将为中纤板码垛机器人的进一步发展和应用提供新的思路和方法。通过优化设计,可以提高生产效率、降低成本,实现制造业的自动化和智能化。中纤板的生产中,码垛机器人是中纤板板自动冲床流水线的核心环节,它的工作性能直接影响整条流水线的生产效率和工人劳动强度。本文针对中纤板自动冲床流水线码垛机器人的各项基本技术指标,设计了一种码垛机器人的机械结构,完成了抓取、旋转、码垛等功能。我们确定了码垛机器人的驱动方式和传动方式,并在Solidwork软件中绘制了机器人的机械结构,完成了三维建模及装配,并输出了码垛机器人的连杆等部件的工程图纸。
关键词:码垛机器人;中纤板;驱动方式;传动方式;Solidwork;
Abstract
With the rapid development of modern industry, automation and intelligence have become an important development direction of manufacturing industry. As an important part of an automated production line, palletizing robot is widely used in various industries. As a common plate, its palletizing operation also needs to be automated. This paper aims to design the body structure of a medium fiber plate palletizing robot to meet the basic technical indicators of the given automatic punch line palletizing robot, and to complete the functions of grasping, rotating and palletizing. In the design process of the palletizing robot, the stability, accuracy and flexibility of the robot should be taken into account. The choice of drive mode and drive mode directly affects the performance of the robot. Therefore, this paper will determine the driving mode and transmission mode of the palletizing robot to improve the performance of the robot.
The research results of this paper will provide new ideas and methods for the further development and application of medium fiber plate palletizing robot. Through optimizing the design, production can be improved efficiency, cost can be reduced, and automation and intelligence of manufacturing industry can be realized. In the production of fiber board, palletizing robot is the core link of the automatic punch assembly line of fiber board. Its working performance directly affects the production efficiency of the whole assembly line and the labor intensity of workers. Based on the basic technical indexes, the mechanical structure of grasping, rotating and stacking. We determined the driving mode and transmission mode of the palletizing robot, and drew the mechanical structure of the robot in the Proe / Solidwork software, completed the three-dimensional modeling and assembly, and output the engineering drawings of the connecting rod and other components of the palletizing robot.
Key words: palletizing robot; medium fiber plate; drive mode; drive mode; Solidwork;
目 录
第1章 绪论
1.1 研究背景及意义
1.2 国内外研究现状及其发展趋势
1.3 主要研究内容和方法
第2章 机器人总体方案设计
2.1机器人组成结构
2.2机器人整体结构图
第3章 机器人传动方案设计
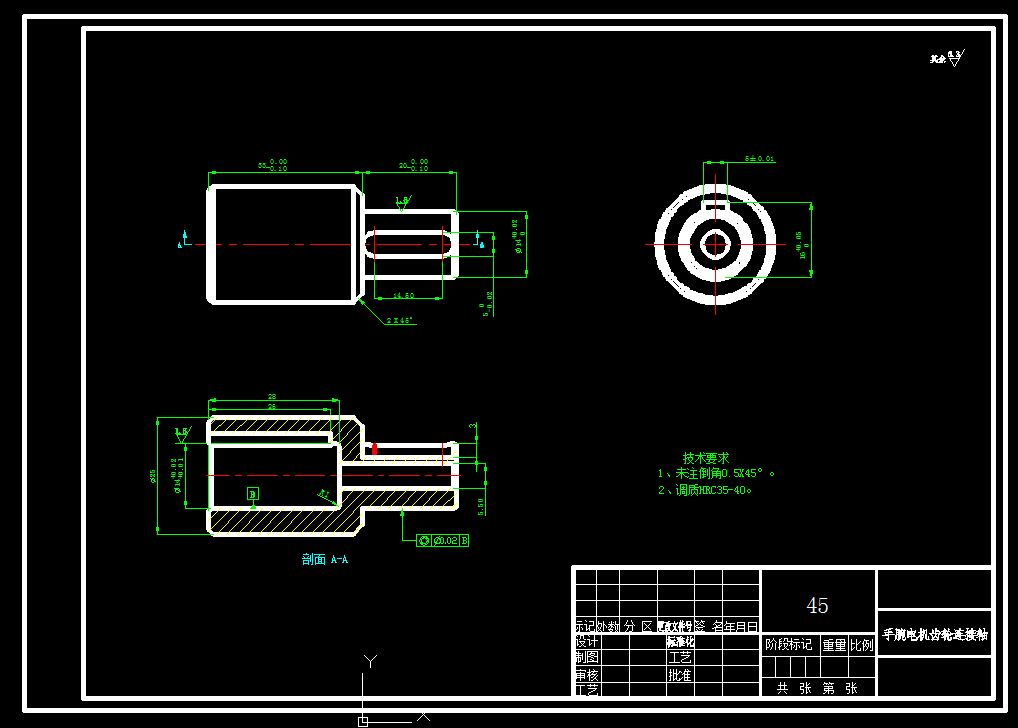
3.1小臂处的传动方案和结构设计
3.2大臂传动方案
3.3腰身传动方案
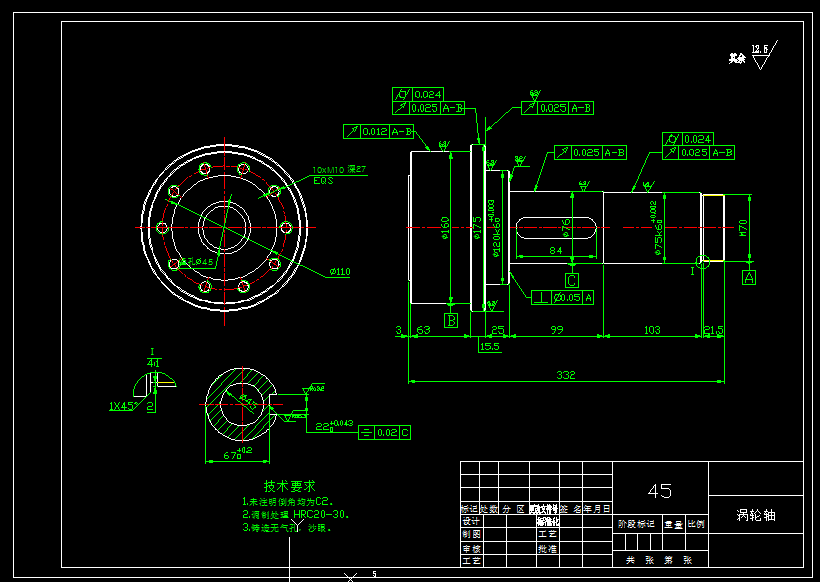
3.4机械手大臂旋转轴的设计
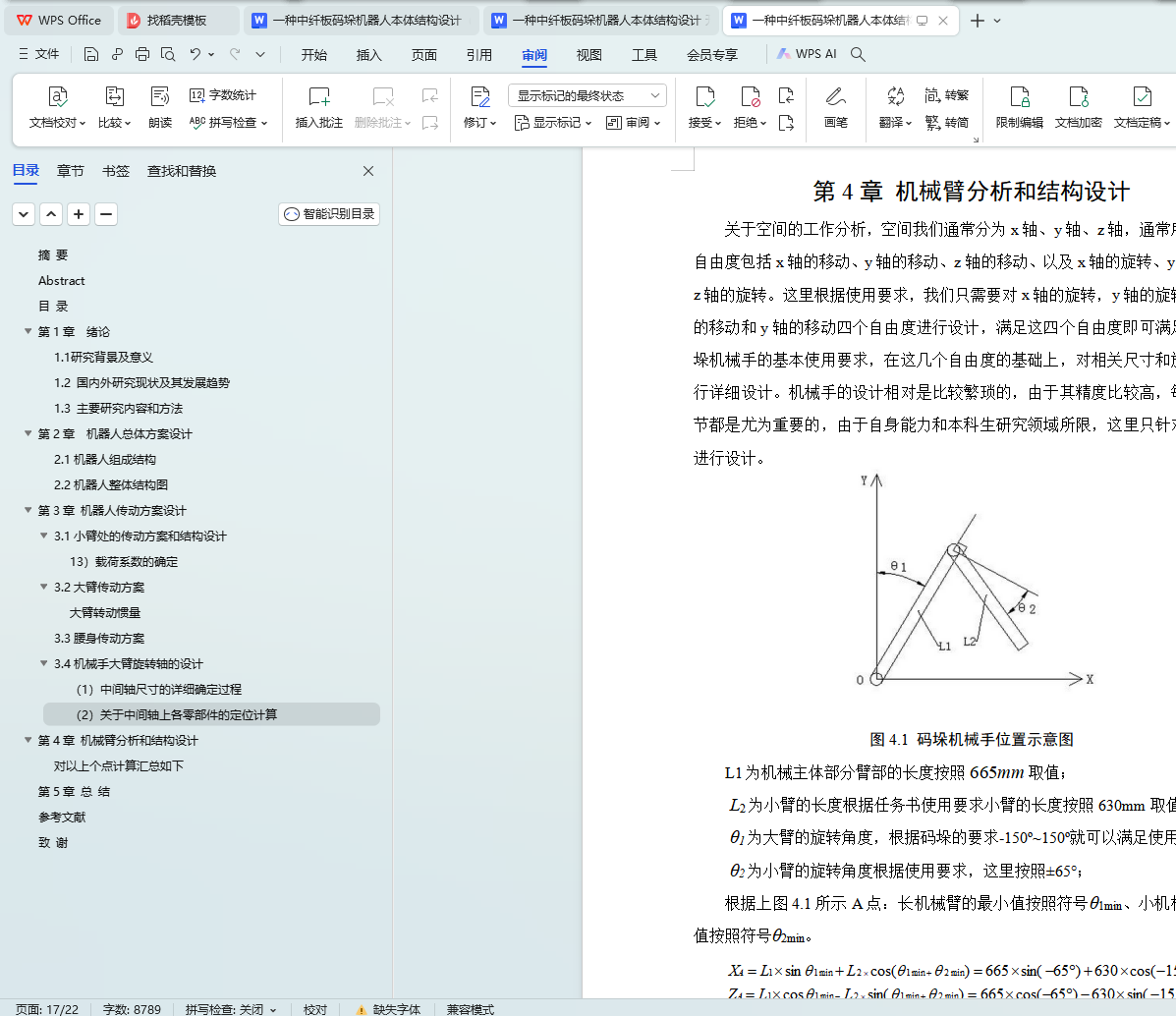
第4章 机械臂分析和结构设计
第5章 总 结
参考文献
致 谢