摘 要
当前,我国在袋装饲料自动化仓储产线中,主要是以人工搬运下料为主,少量自动化设备为辅。这样一来企业的生产效率较低,用人成本高,市场竞争力不强等弊端,变得越来越突出。
为了解决这一问题,可以通过袋装饲料自动化仓储产线的集中控制方式来提高生产效率和自动化控制水平,产线主要采用西门子 S7-1200 为主控系统,ABBIRB1410 为从站, 通信方式采用 PROFINET,产线设备主要由步进电机、ABB 机器人、光电传感器和传送带等构成。预期主要准对仓储产线下料,通过三轴机械手先把饲料进行抓取到传送带上, 待饲料到位后 ABB 机器人进行抓取码垛。主要功能有手/自动切换,机器人运动模式选择, 共三种模式:(1)机器人自动回原点模式;(2)机器人带料运动模式;(3)机器人不带料空跑模式。本设计进行系统整体控制流程设计、硬件选型、系统的电路设计及接线、程序编写以及在校实验室进行模拟调试,程序满足控制流程要求。
本设计基于 PLC 自动化控制的袋装饲料仓储控制系统具有操作简单,实用性强,效率高,在校实验室经过模拟调试后,满足袋装饲料仓储控制系统的控制要求,具有很强的应用意义和推广价值。
关键词:自动化;PLC;PROFINET;工业机器人
Abstract
At present, in the bagged feed automatic storage production line, the main is manual handling and unloading, a small number of automatic equipment as a supplement. In this way, the production efficiency of enterprises is low, the cost of employing people is high, the market competitiveness is not strong and other disadvantages, become more and more prominent.
In order to solve this problem, the production efficiency and automatic control level can be improved through the centralized control mode of the bagged feed automatic storage production line. The production line mainly adopts Siemens S7-1200 as the master system, ABBIRB1410 as the slave station, and the communication mode is PROFINET. Production line equipment is mainly composed of stepper motor, ABB robot, photoelectric sensor and conveyor belt. It is expected that the feed will be grabbed onto the conveyor belt by the three-axis manipulator, and the ABB robot will grab and pallete the feed after it is in place. The main functions include hand/automatic switching, robot movement mode selection, a total of three modes (1)robot automatic return to the origin mode; (2)robot conveyor movement mode; (3)The robot runs empty without material. The design of the system overall control process design, hardware selection, circuit design and connection of the system, programming and simulation debugging in the school laboratory, procedures to meet the requirements of the control process.
This design based on PLC automatic control bag feed storage control system has the advantages of simple operation, strong practicability and high efficiency. After simulation debugging in school laboratory, it meets the control requirements of bag feed storage control system, which has a strong application significance and promotion value.
Key words: Automation;PLC;PROFINET; Industrial Robot
1 绪 论 1
1.1 研究目的及意义 1
1.2 研究发展现状 1
1.3 技术路线 2
1.4 研究内容 3
2 袋装饲料仓储控制系统整体方案设计 4
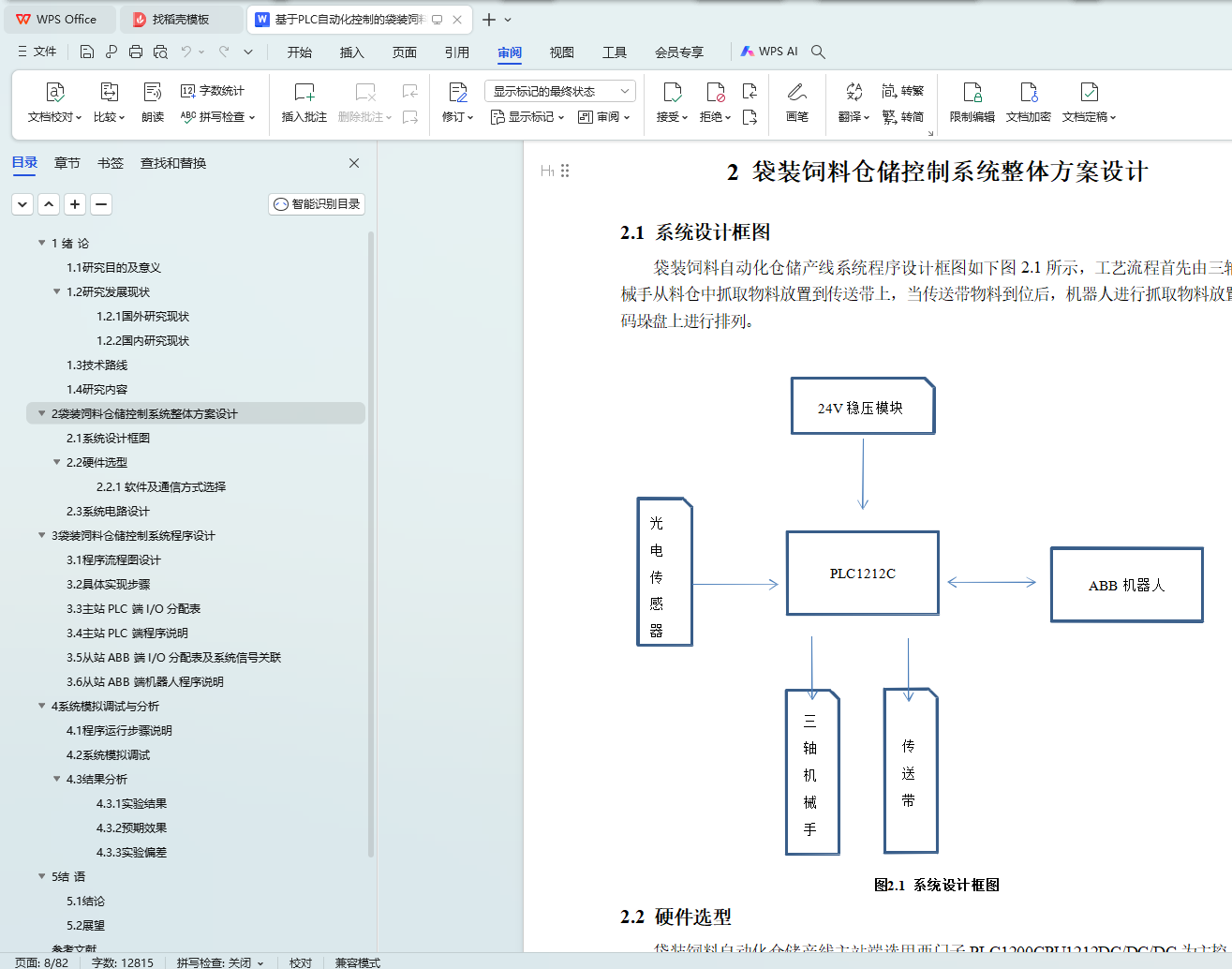
2.1 系统设计框图 4
2.2 硬件选型 4
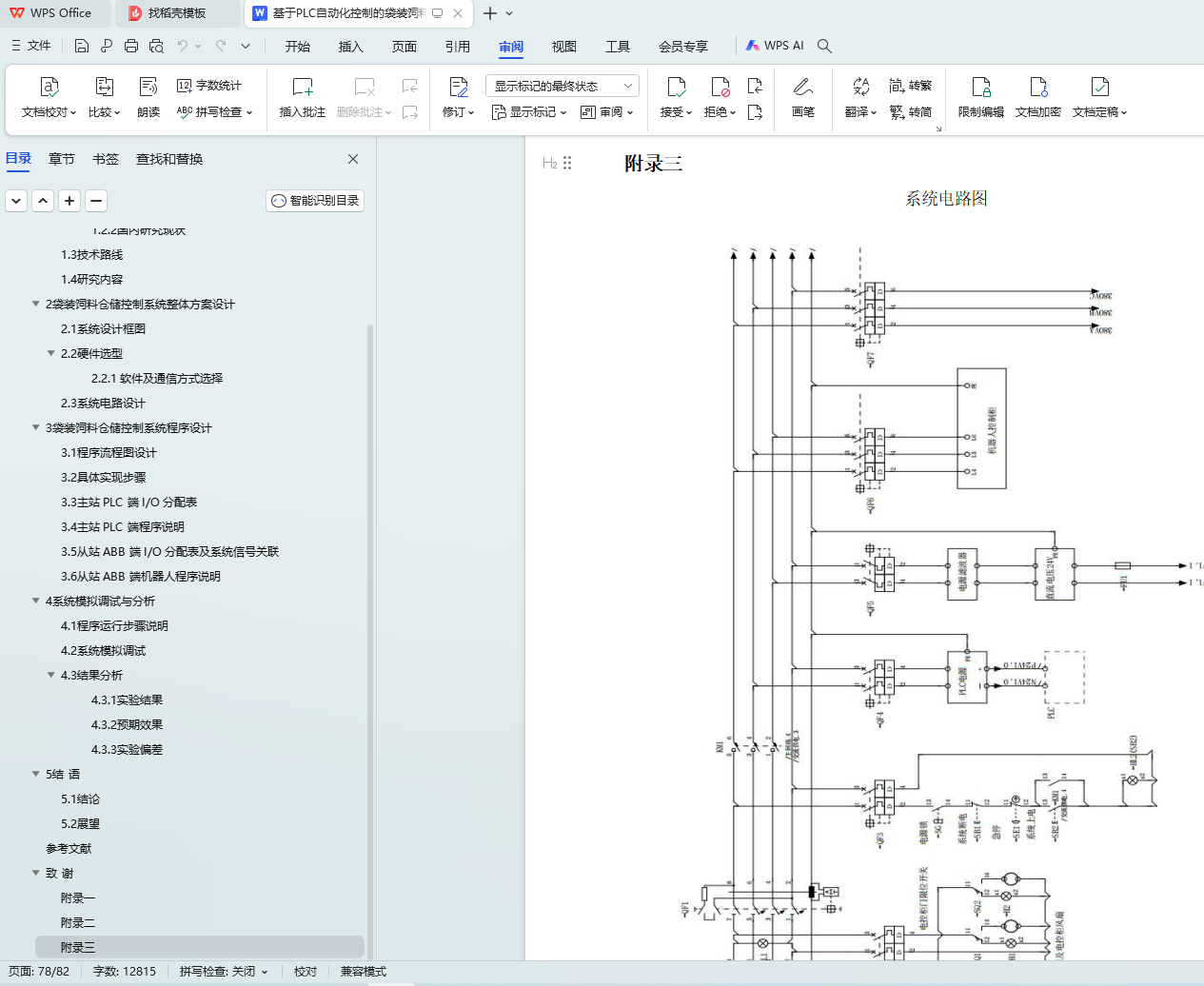
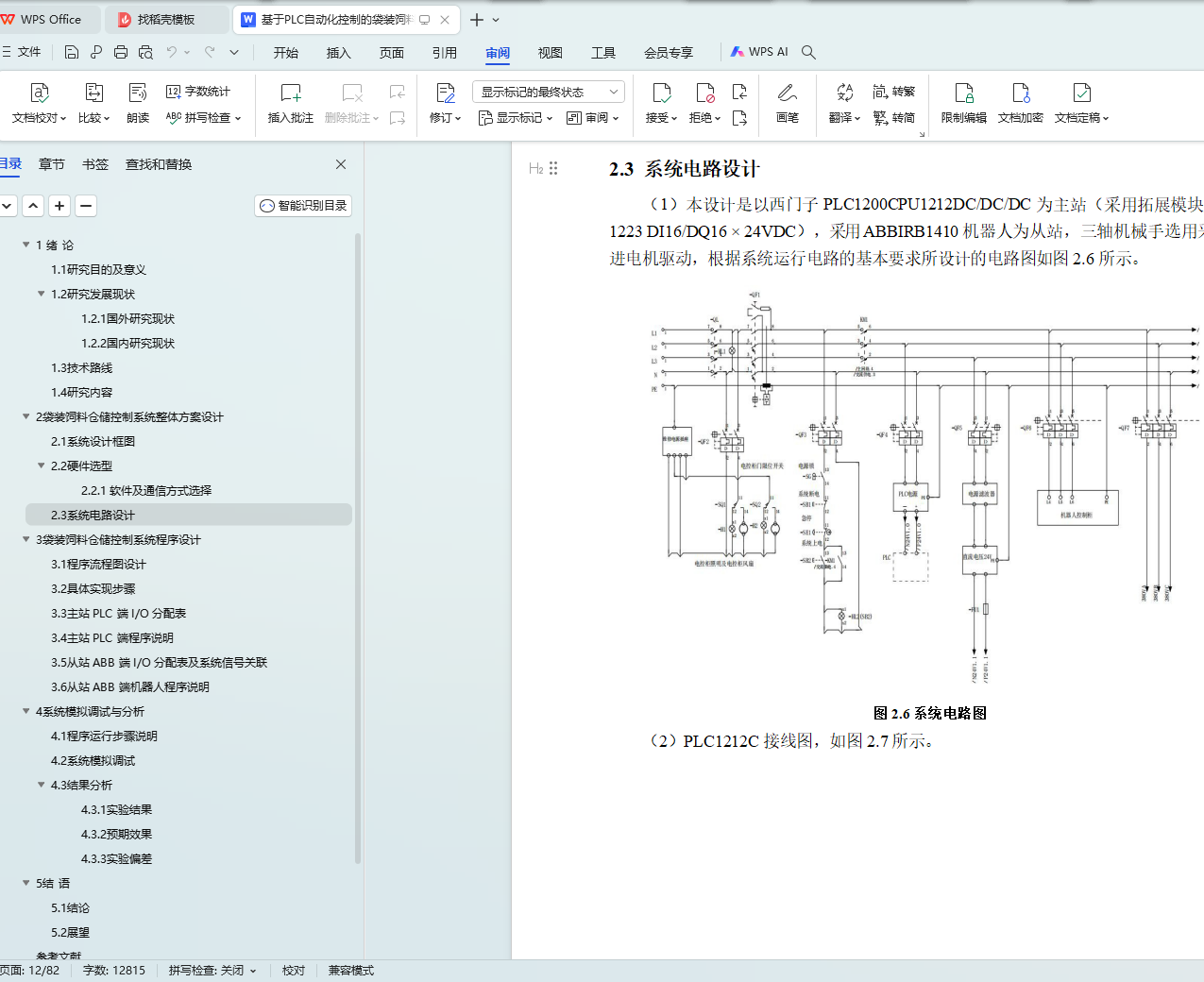
2.3 系统电路设计 8
3 袋装饲料仓储控制系统程序设计 11
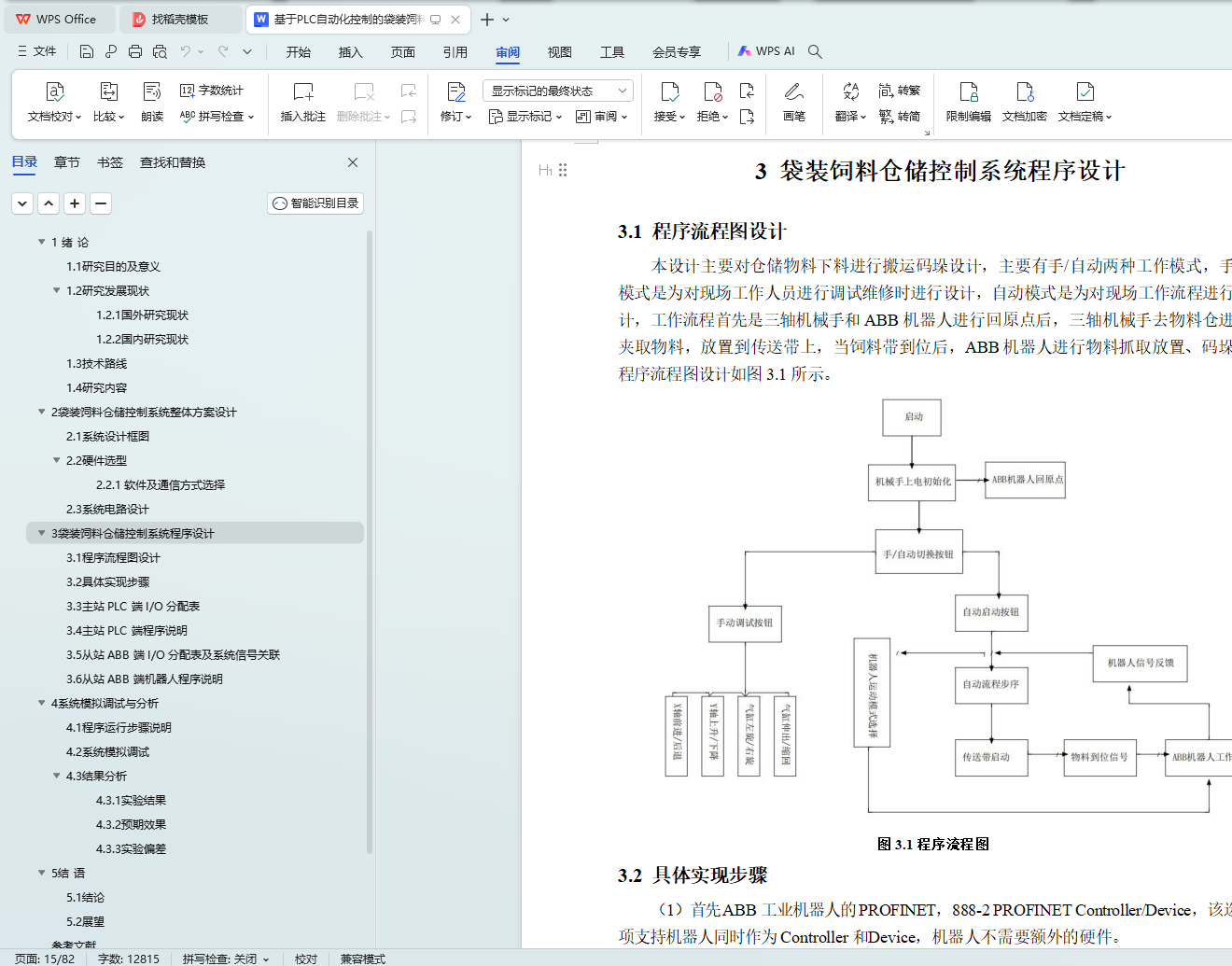
3.1 程序流程图设计 11
3.2 具体实现步骤 11
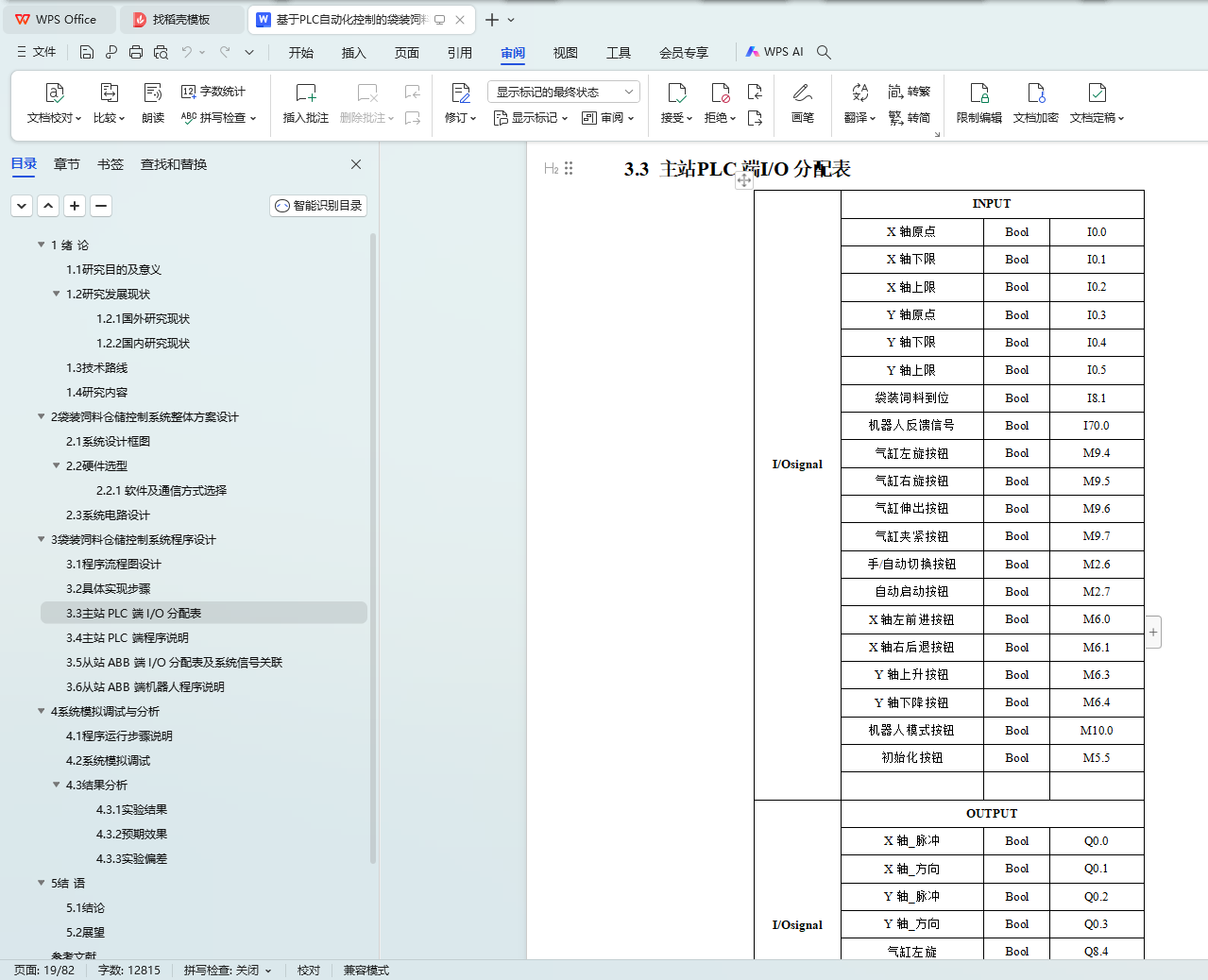
3.3 主站 PLC 端 I/O 分配表 15
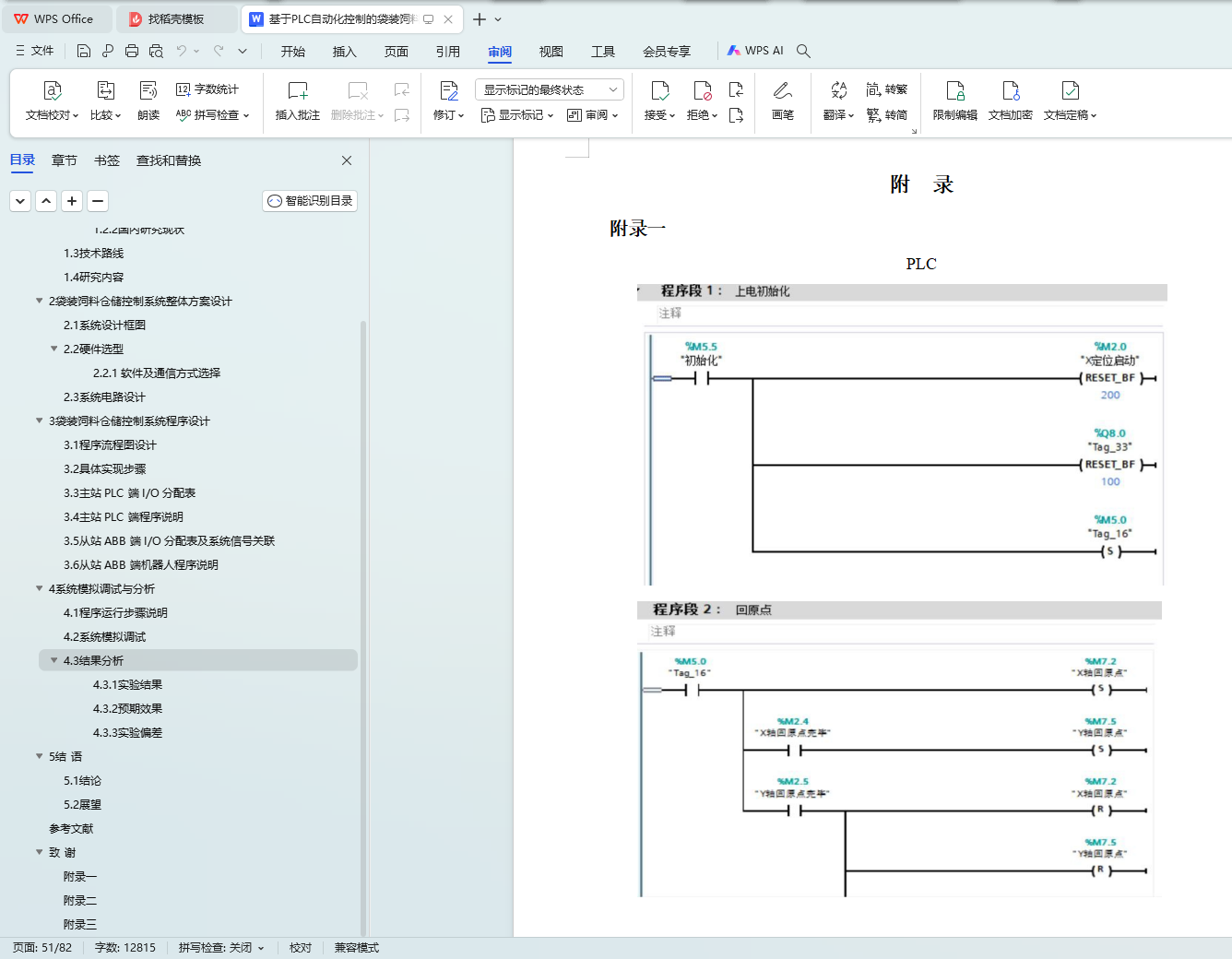
3.4 主站 PLC 端程序说明 16
3.5 从站 ABB 端 I/O 分配表及系统信号关联 32
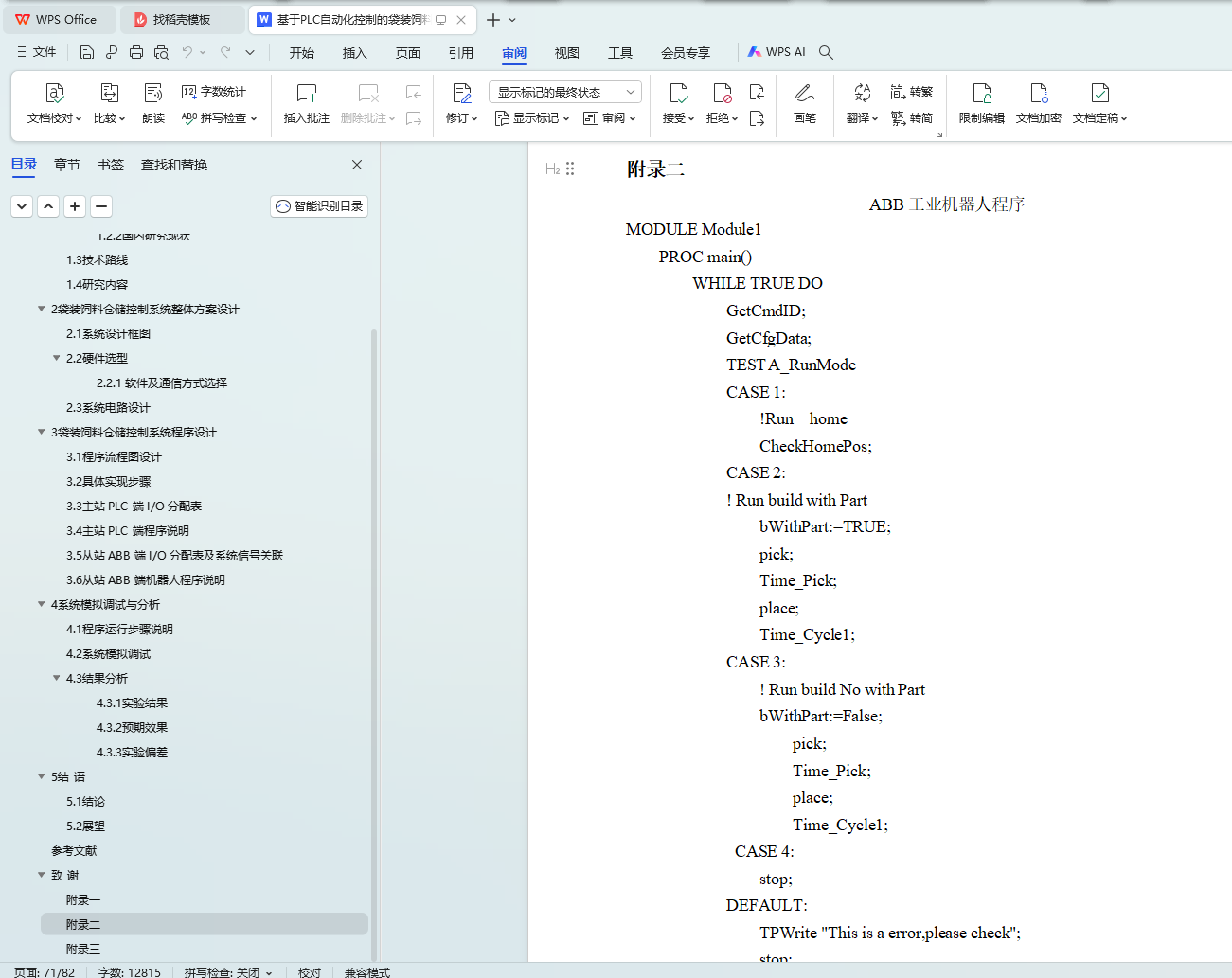
3.6 从站 ABB 端机器人程序说明 33
4 系统模拟调试与分析 40
4.1 程序运行步骤说明 40
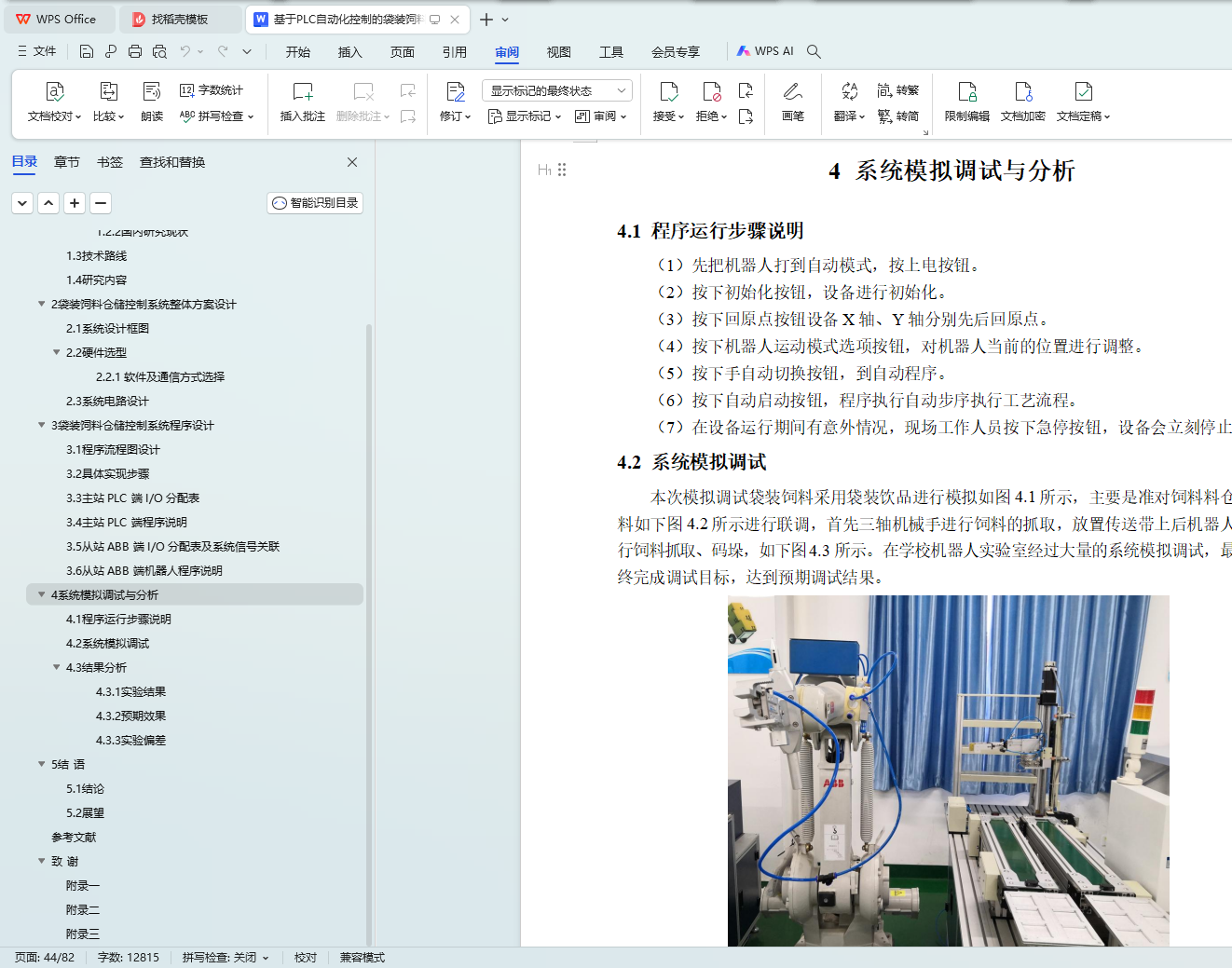
4.2 系统模拟调试 40
4.3 结果分析 41
5 结 语 43
5.1 结论 43
5.2 展望 43
参考文献 44
致 谢 46