摘要
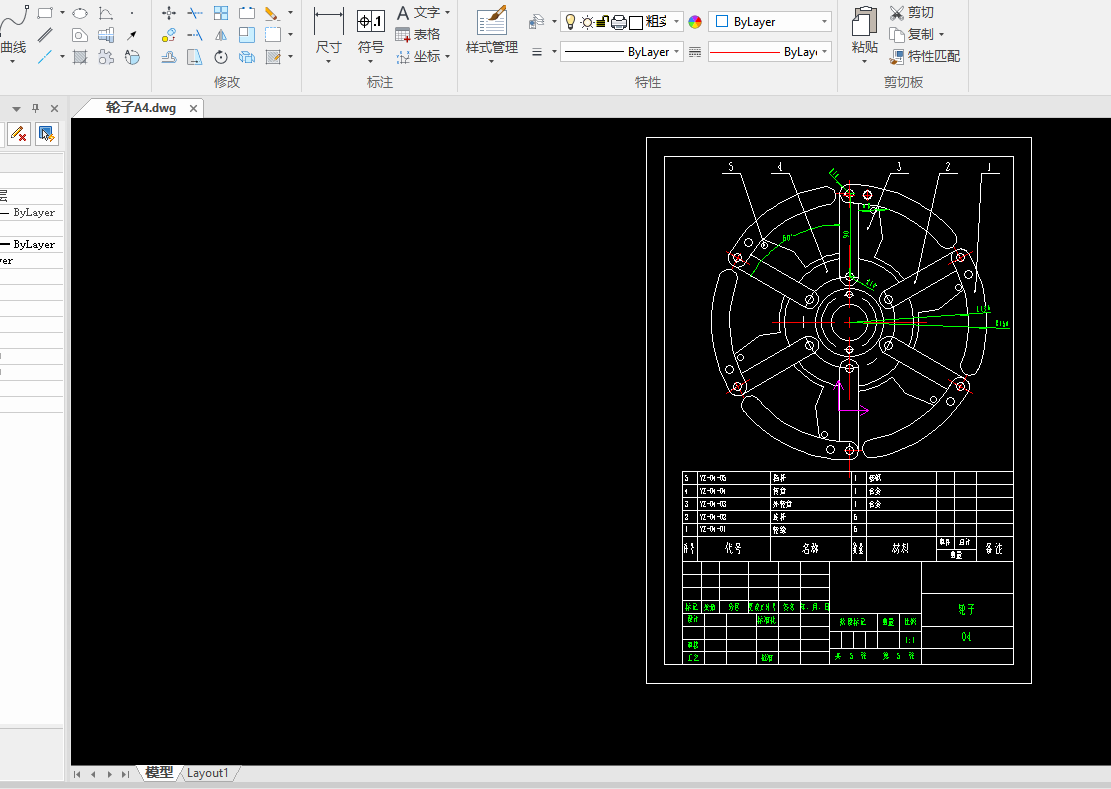
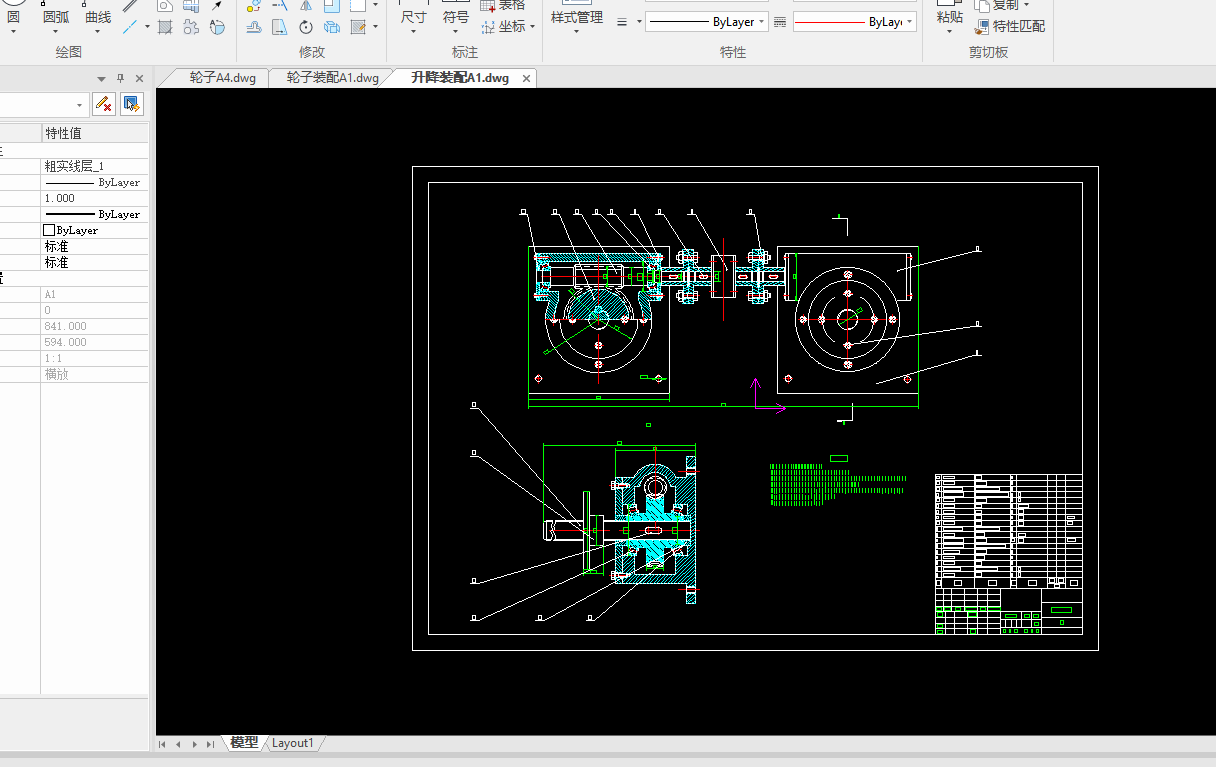
智能移动机器人是机器人研究领域的一个重要分支,主要研究方向集中在信息采集、导航定位、路径规划、人机交互等方面。“移动”是机器人的重要属性。目前移动机器人按照不同的移动方式可以分为四类,不同类型的机器人在移动功能上各有千秋。本文设计为林地巡检车,其最重要的结构特点是轮子可以实现变形,根据不同的路况改变轮子形状前进。在平地面行驶时,机器人作为轮式机器人平稳快速地前进。当遇到障碍物时,轮子变形,机器人作为具有良好的越障能力的腿式机器人前进。
林业巡检机器人是智能机器人中的一类,可在大幅减轻人类劳动强度的同时,安全可靠的完成指定区域的监测任务。本课题研究的是一种基于越障的智能林业巡检机器人,可对巡逻区域进行自动、智能的自主巡逻,并进行温度监控、火灾隐患监控及对可疑人员进行监控,采用巡检机器人进行定时、定点巡逻或不间断流动巡逻不仅节省人力,还能到达监控探头不能拍到的死角,及时将检查的环境情况采集成视频,便于事后查看。只要在局域网Wi-Fi环境中,就可将图像传入接入互联网的任何一台电脑,实时了解机器人的运行状态,并保存图像。
论文主要完成了上位机控制系统平台的设计与实现,包括上位机导航、上位机的控制系统,以及巡检机器人机载传感器的扩充,并对所述林业巡检机器人进行了实验室环境下模拟验证,验证结果表明,智能巡逻机器人系统整体运行良好。
关键词:腿轮式;巡检;避障;传感器融合;
目录
摘要
1 绪论
1.1 课题研究意义
1.2 林业机器人的现状及发展
1.3 移动机器人技术的研究现状
1.4 巡检机器人软件研究现状
1.5 多传感器融合研究现状
1.6 论文主要内容及结构安排
2 巡检机器人系统需求分析与整体方案设计
2.1 系统设计的需求分析
2.1.1 功能需求
2.1.2 性能需求
2.2 巡检机器人系统方案设计
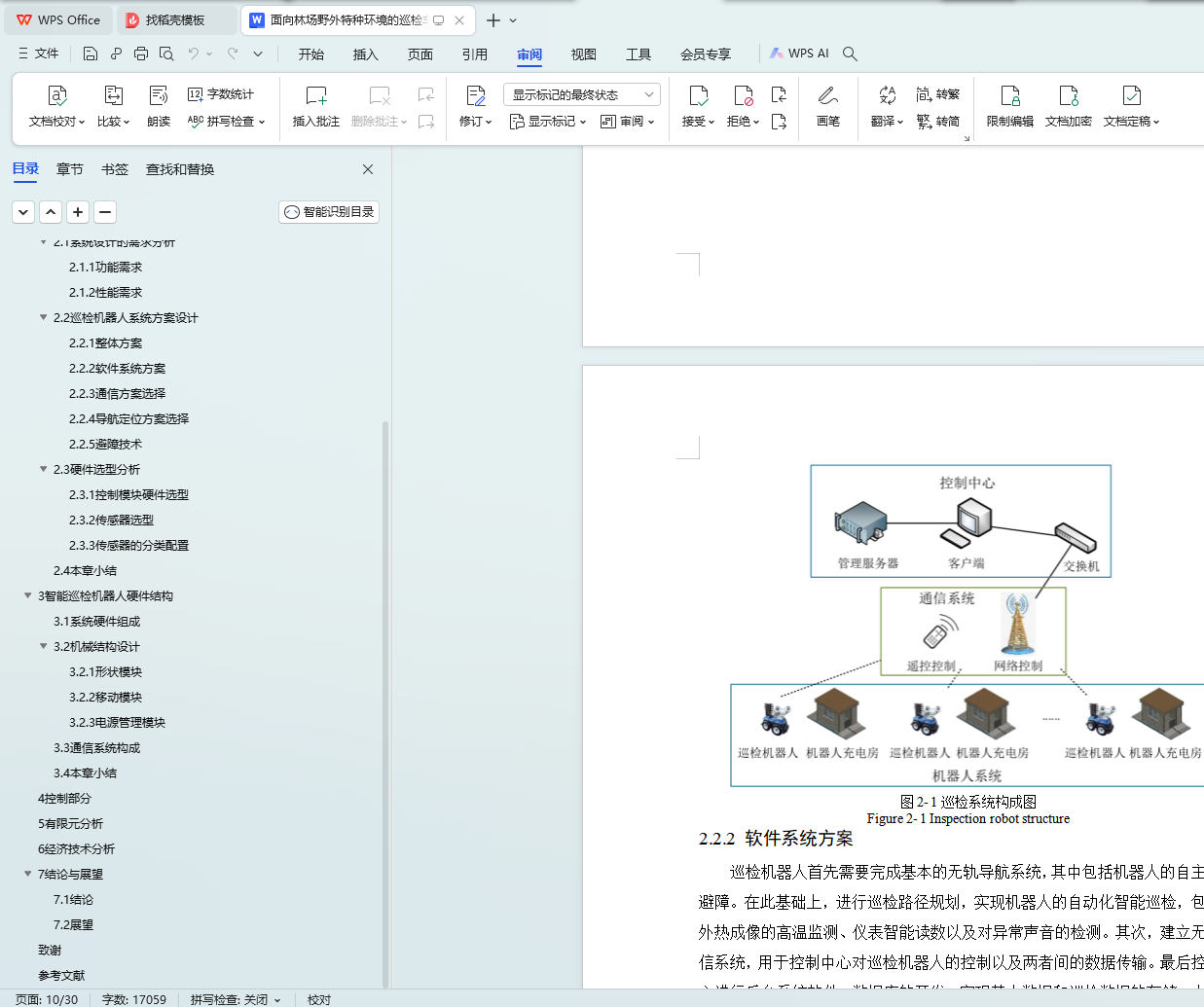
2.2.1 整体方案
2.2.2 软件系统方案
2.2.3 通信方案选择
2.2.4 导航定位方案选择
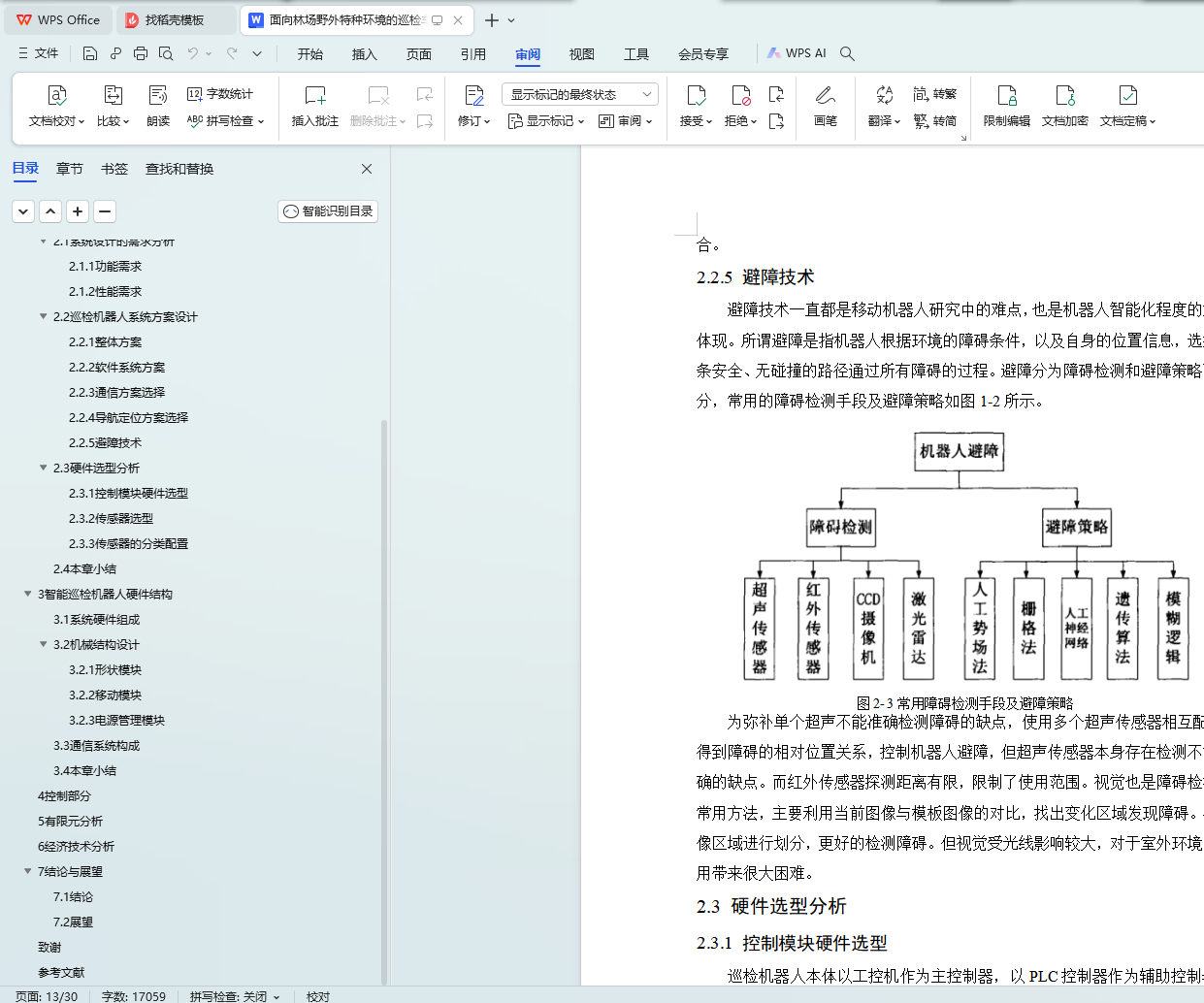
2.2.5 避障技术
2.3 硬件选型分析
2.3.1 控制模块硬件选型
2.3.2 传感器选型
2.3.3 传感器的分类配置
2.4 本章小结
3 智能巡检机器人硬件结构
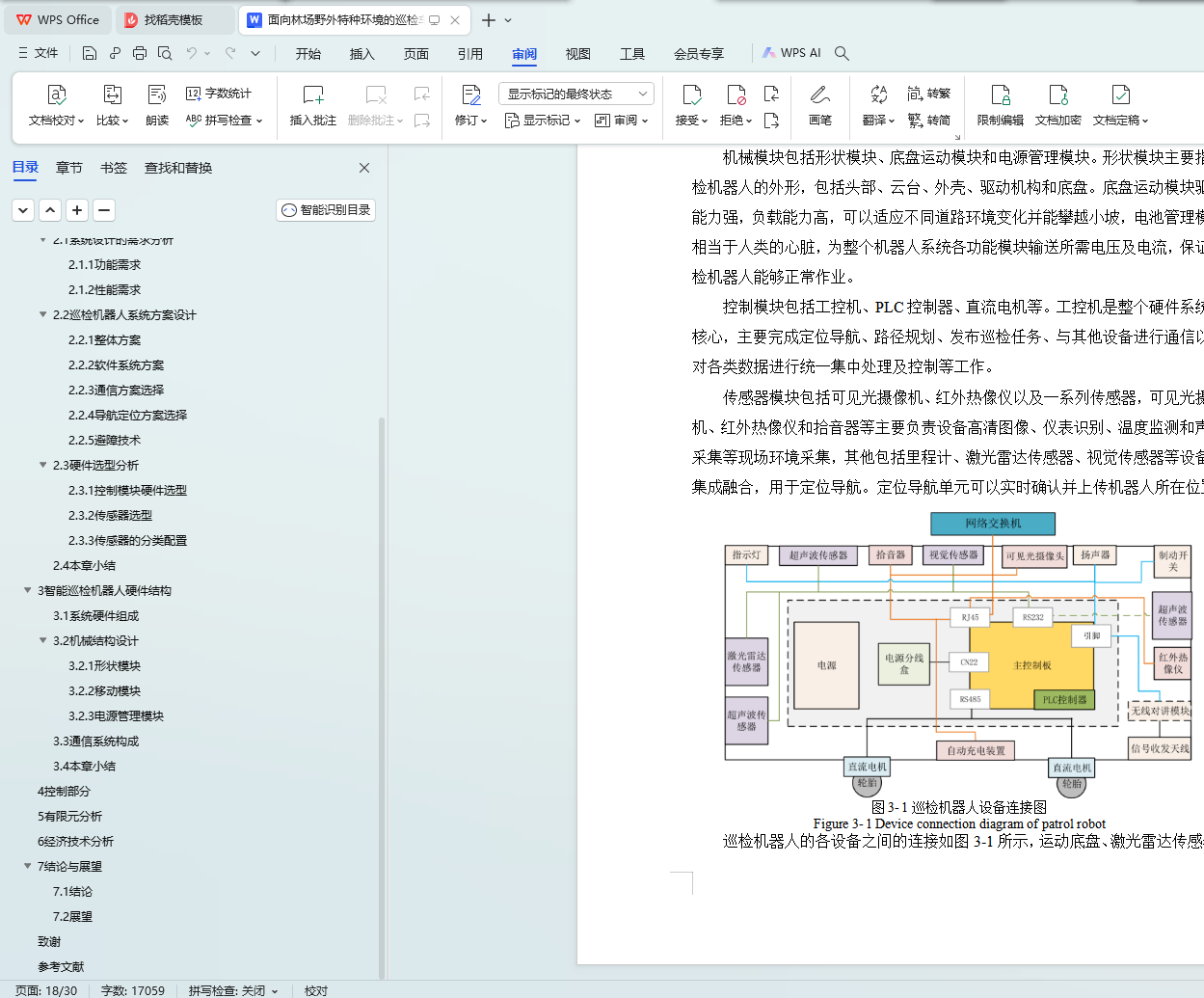
3.1 系统硬件组成
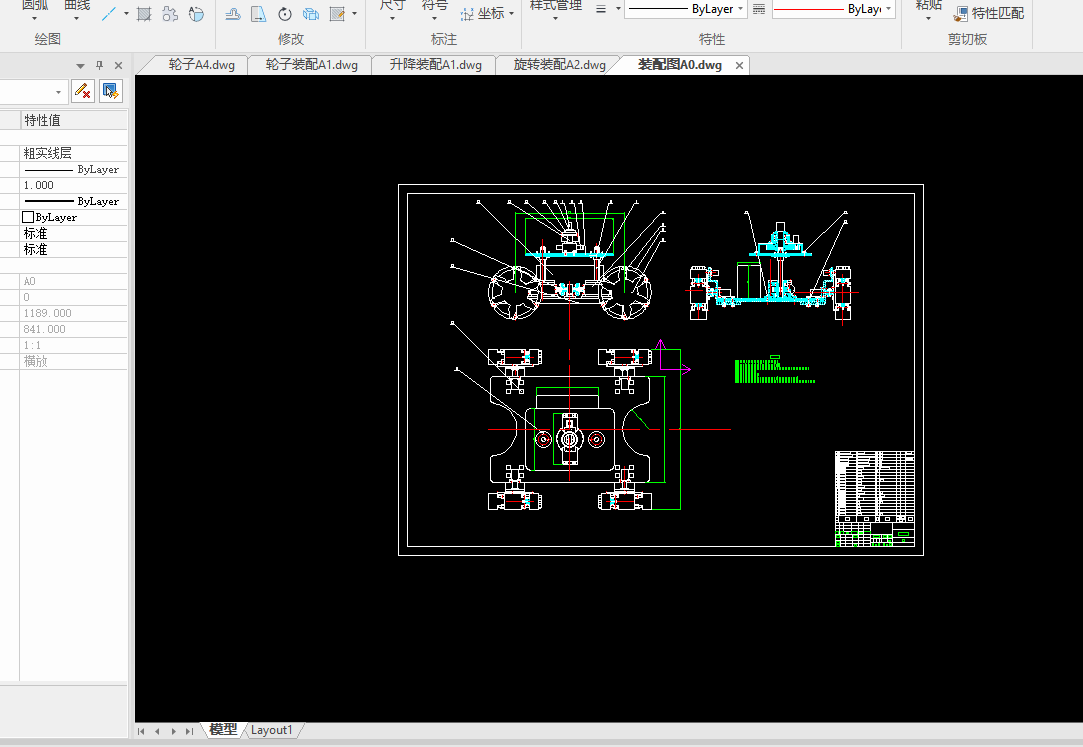
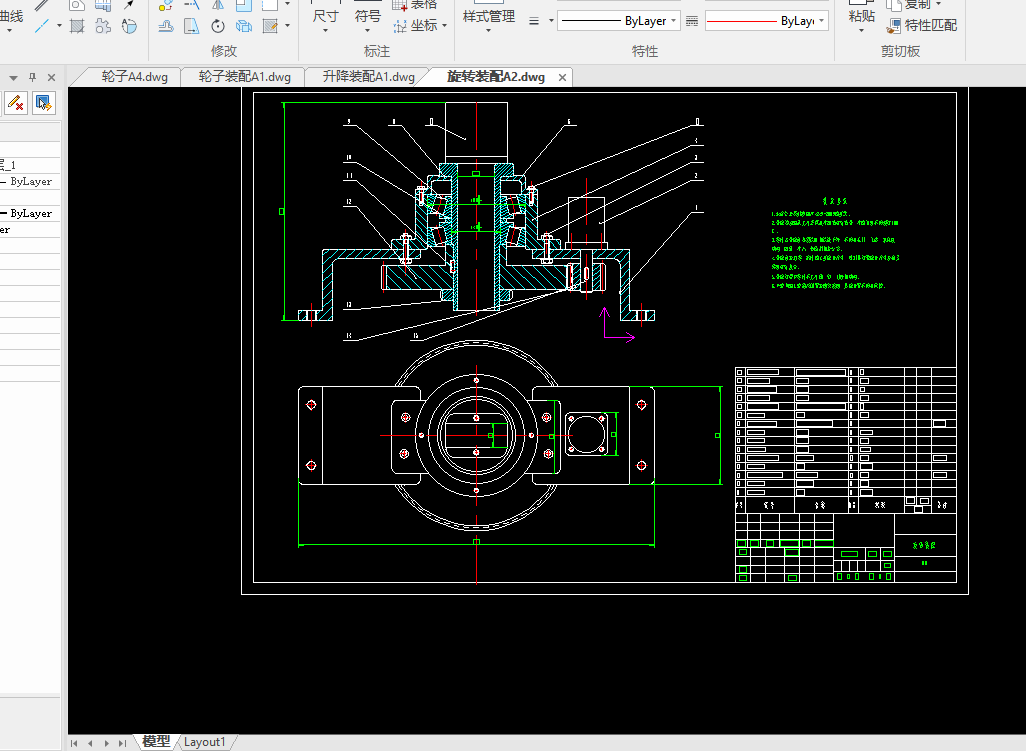
3.2 机械结构设计
3.2.1 形状模块
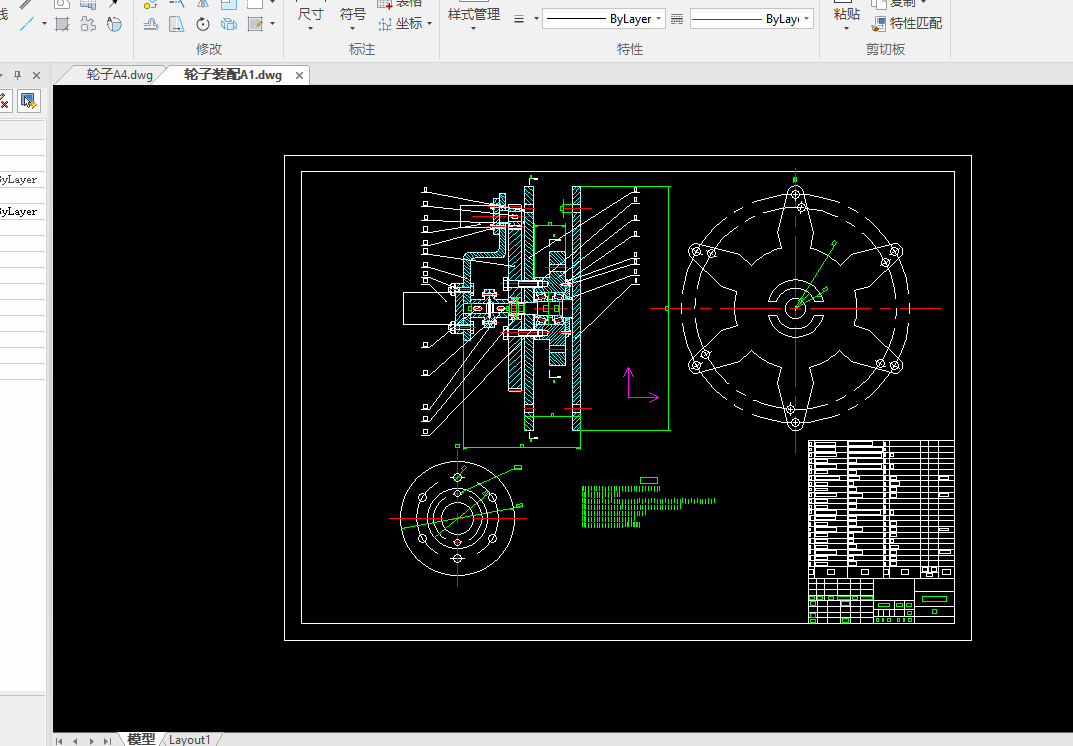
3.2.2 移动模块
3.2.3 电源管理模块
3.3 通信系统构成
3.4 本章小结
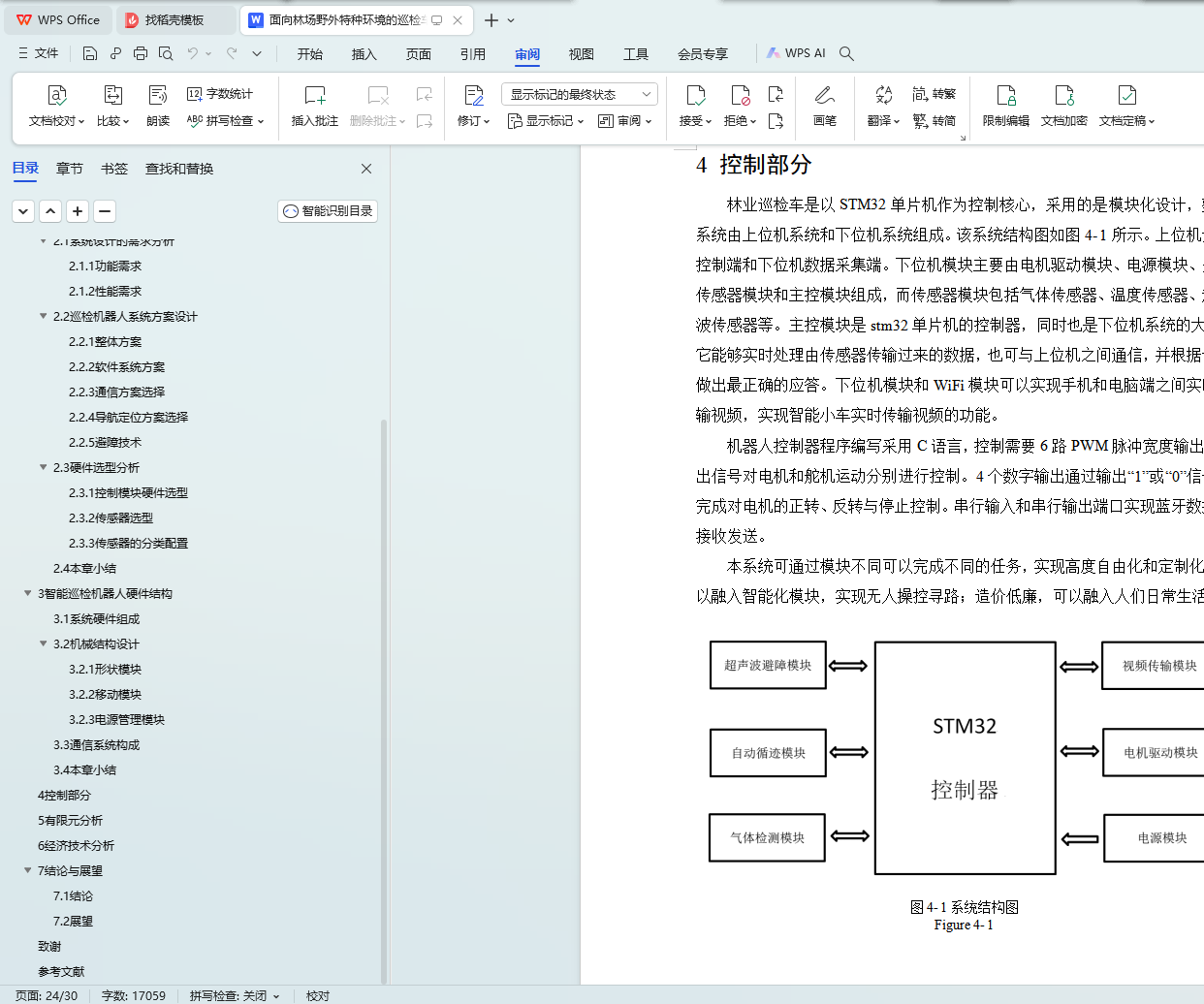
4 控制部分
5 经济技术分析
6 结论与展望
6.1 结论
6.2 展望
致谢
参考文献