摘 要
本论文以基于反作用轮的轮式机器人系统为研究对象,对其特殊的机械构造进行分析,以反作用轮作为建模切入点,将机器人模型简化为倒立摆模型。在研究过程中,本文使用动量矩定理法对简化的倒立摆模型进行受力分析,建立系统动力学方程。针对轮式机器人系统在自然条件下为欠稳定系统,无法保持平衡状态的问题,本文使用滑模控制策略设计平衡控制器,驱动反作用轮转动产生力矩,使得系统在静止、转向、前行等状态下保持平衡。
同时,本文还设计两种逼近集总干扰的方法:一是有限时间干扰观测方法,二是双隐含层递归神经网络(Double Hidden Layer Recurrent Neural Network, DHLRNN)法。在双隐含层递归神经网络拟合干扰的控制策略中,以滑模函数变量为基准设计网络中心向量、基宽度、权重以及反馈参数的自适应增益,设计基于DHLRNN的快速非奇异终端滑模控制器。同时针对DHLRNN拟合初期存在拟合误差的现象,提出模糊控制方法对DHLRNN干扰观测项和滑模控制本征切换增益进行权重控制。
最后,本文使用李亚普诺夫函数对所设计控制器进行稳定性证明,并搭建MATLAB仿真环境验证控制器的控制性能。同时,使用STM32芯片、姿态传感器MPU6050、陀螺仪、显示屏等硬件搭建基于反作用轮的轮式机器人实测平台,根据实测结果,所设计的三种滑模控制器具有优越的控制效果,其中基于DHLRNN的模糊滑模控制器控制性能最佳,控制误差最小。
本文的研究成果对于提高基于反作用轮的轮式机器人的平衡控制性能和控制精度具有重要意义,同时对于其他类似的机器人平衡控制问题也具有一定的参考价值。
关键词:轮式机器人、干扰观测器、神经网络观测器、模糊滑模控制、双闭环控制
ABSTRACT
In this paper, the wheeled robot system based on the reaction wheel is studied to analyze its special mechanical structure, and the robot model is simplified to the inverted pendulum model. In this research, the momentum moment theorem to analyze the simplified inverted pendulum model. In view of the problem that the wheeled robot system is not stable under natural conditions and cannot maintain the balance state, this paper uses the sliding mode control strategy to design the balance controller, which drives the reaction wheel to generate the torque, so that the system keeps the balance in the static, steering and forward states.
At the same time, this paper also designs two methods to approximate the lumped interference: one is the finite time interference observation method, the other is the double hidden layer recurrent neural network (Double Hidden Layer Recurrent Neural Network, DHLRNN) method. In the control strategy of fitting interference of double hidden layer recurrent neural network, the adaptive gain of network center vector, base width, weight and feedback parameters is designed by using the sliding mode function variable, and the fast non-singular terminal sliding mode controller based on DHLRNN is designed.
At the same time, considering the fitting error in the initial stage of DHLRNN fitting, the fuzzy control method is proposed to control the weight of the DHLRNN interference observation term and the sliding mode control intrinsic switching gain. Finally, in this paper, the Lyapunov function is used to prove the stability of the designed controller, and to build a MATLAB simulation environment to verify the control performance of the controller. At the same time, STM 32 chip, attitude sensor MPU6050, gyroscope, display screen and other hardware are used to build a wheeled robot measurement platform based on the reaction wheel. According to the measured results, the three kinds of sliding mode controllers designed have superior control effect, among which the fuzzy sliding mode controller based on DHLRNN has the best control performance and the smallest control error.
The results of this paper are of great significance for improving the balance control performance and control accuracy of the rotating robots, and also have some reference value for other similar robot balance control problems.
Keywords: wheeled robot, interference observer, neural network observer, fuzzy sliding mode control, double closed-loop control
目 录
摘 要
ABSTRACT
第1章 绪论
1.1 研究背景及意义
1.2 国内外控制技术研究
1.3 本文主要研究内容
第2章 轮式机器人系统分析及模型建立
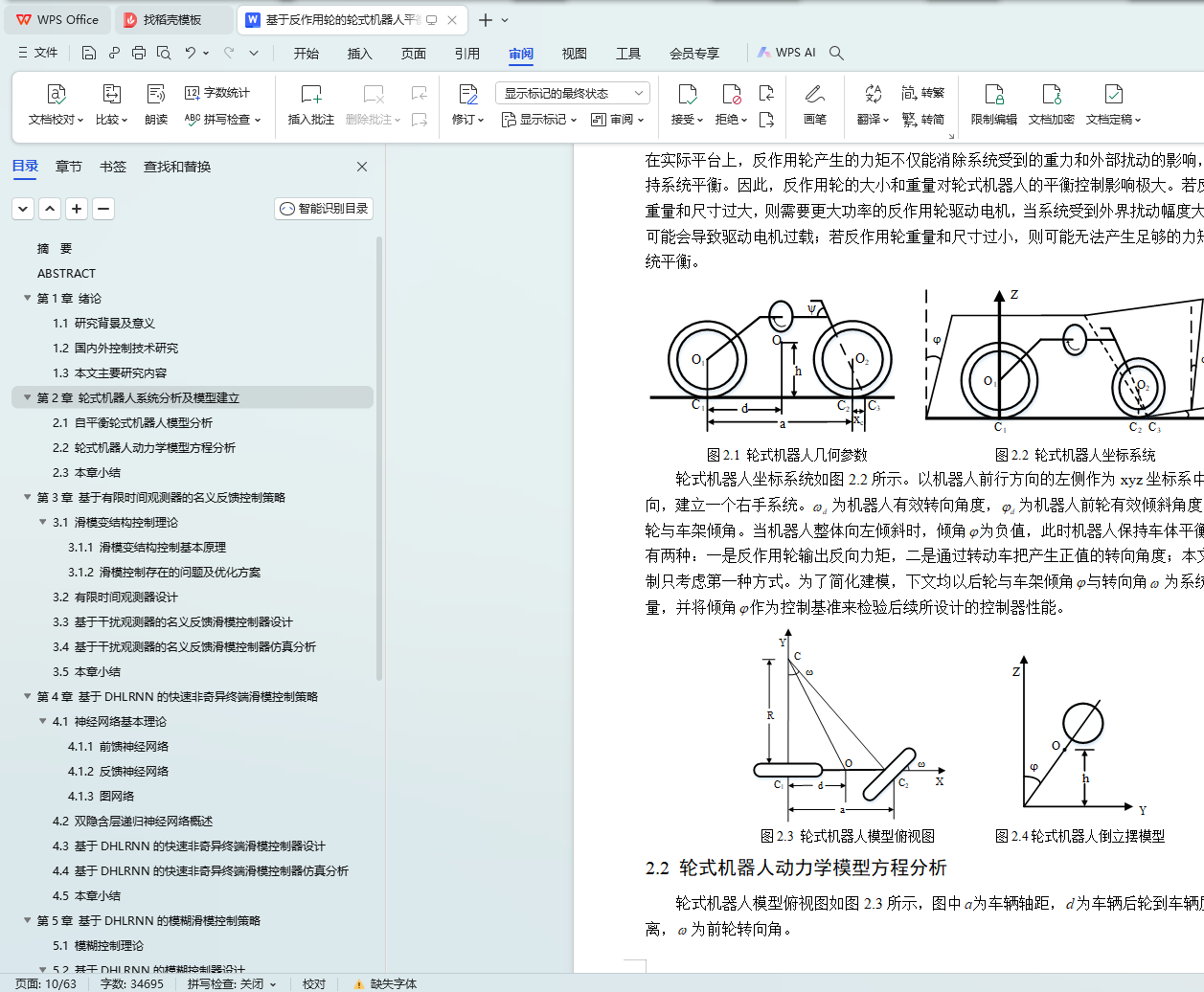
2.1 自平衡轮式机器人模型分析
2.2 轮式机器人动力学模型方程分析
2.3 本章小结
第3章 基于有限时间观测器的名义反馈控制策略
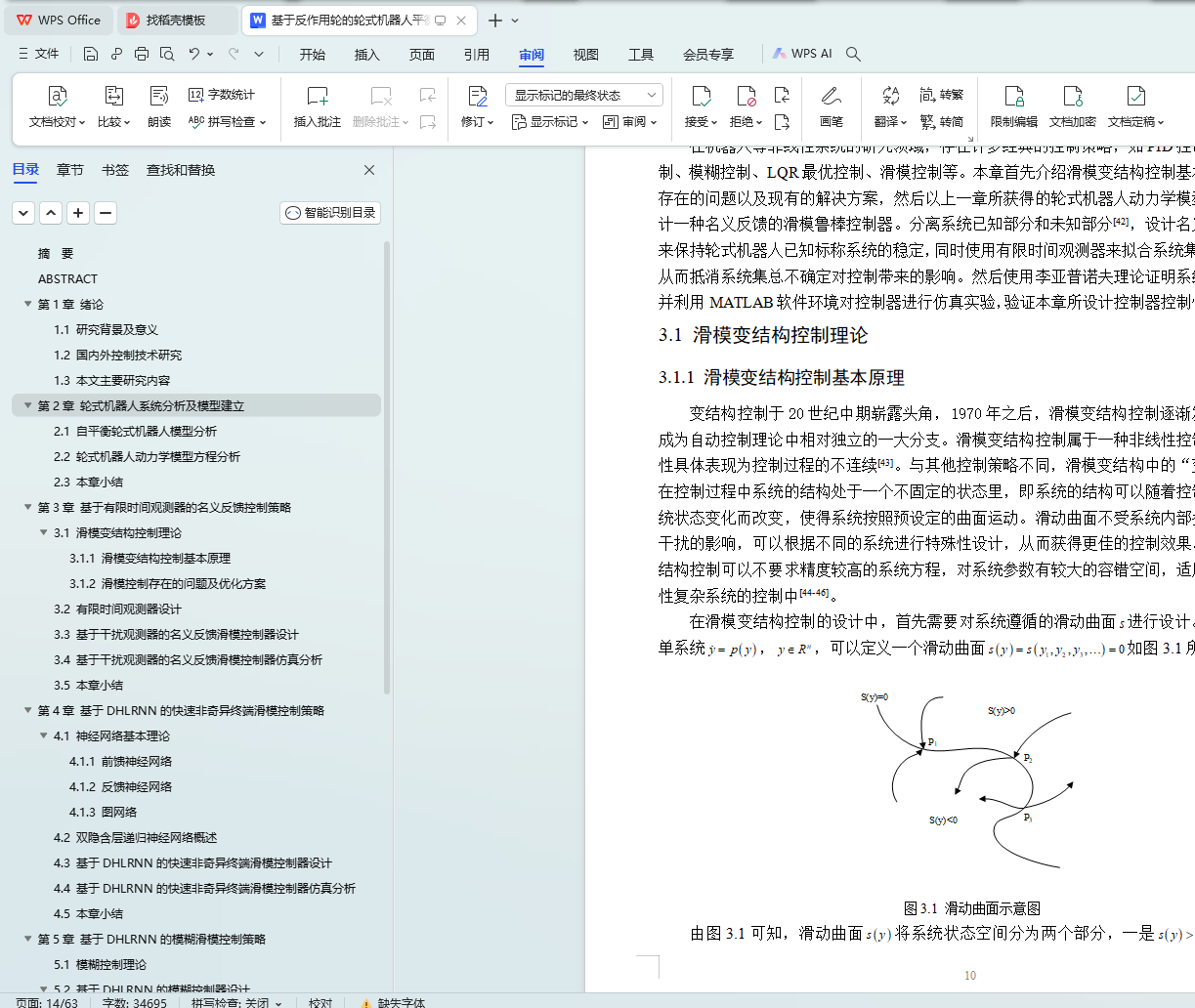
3.1 滑模变结构控制理论
3.1.1 滑模变结构控制基本原理
3.1.2 滑模控制存在的问题及优化方案
3.2 有限时间观测器设计
3.3 基于干扰观测器的名义反馈滑模控制器设计
3.4 基于干扰观测器的名义反馈滑模控制器仿真分析
3.5 本章小结
第4章 基于DHLRNN的快速非奇异终端滑模控制策略
4.1 神经网络基本理论
4.1.1 前馈神经网络
4.1.2 反馈神经网络
4.1.3 图网络
4.2 双隐含层递归神经网络概述
4.3 基于DHLRNN的快速非奇异终端滑模控制器设计
4.4 基于DHLRNN的快速非奇异终端滑模控制器仿真分析
4.5 本章小结
第5章 基于DHLRNN的模糊滑模控制策略
5.1 模糊控制理论
5.2 基于DHLRNN的模糊控制器设计
5.2.1 模糊控制参数设计
5.2.2 基于DHLRNN的滑模控制器设计
5.3 基于DHLRNN的模糊滑模控制器仿真分析
5.4 本章小结
第6章 实验平台验证与分析
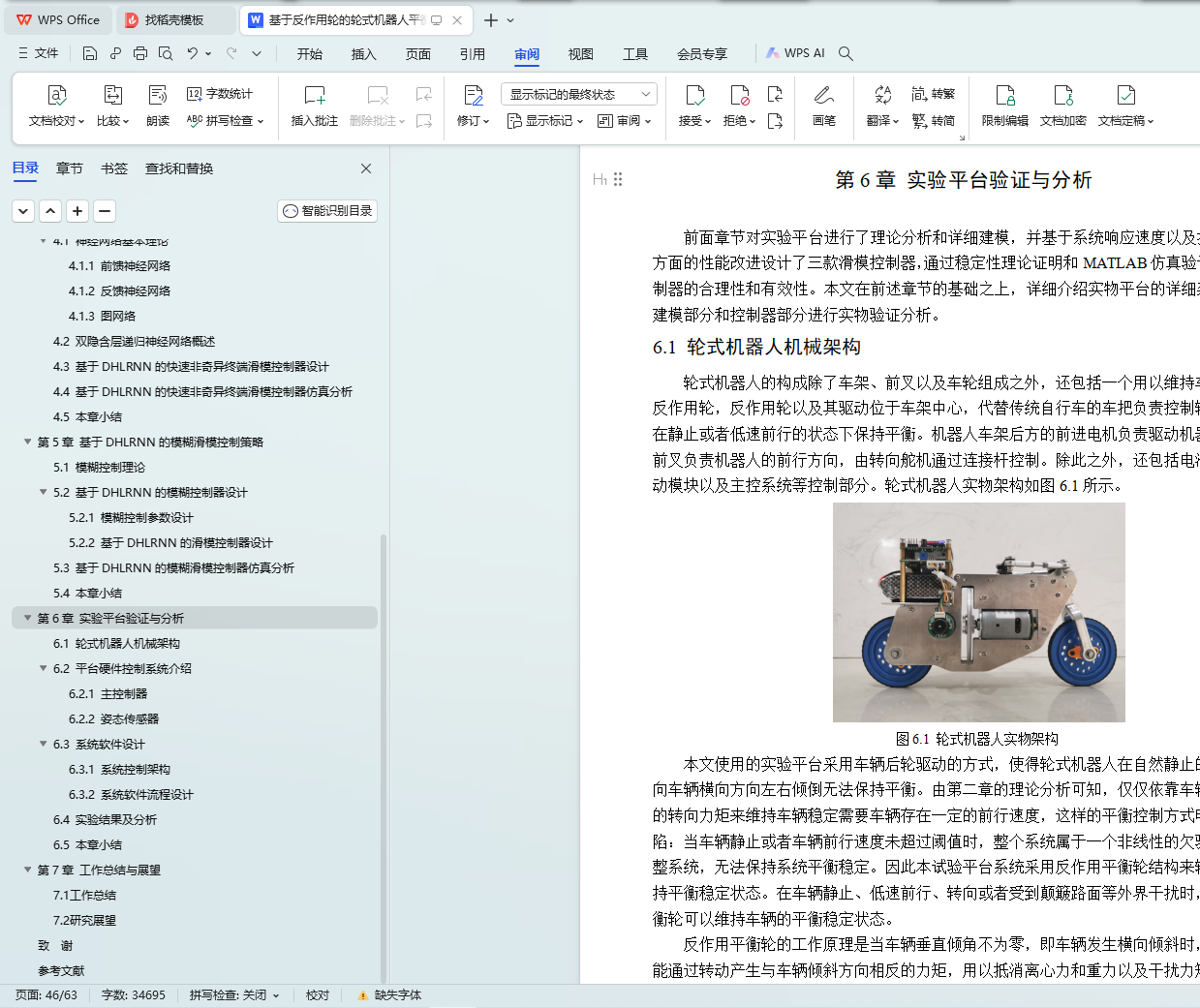
6.1 轮式机器人机械架构
6.2 平台硬件控制系统介绍
6.2.1 主控制器
6.2.2 姿态传感器
6.3 系统软件设计
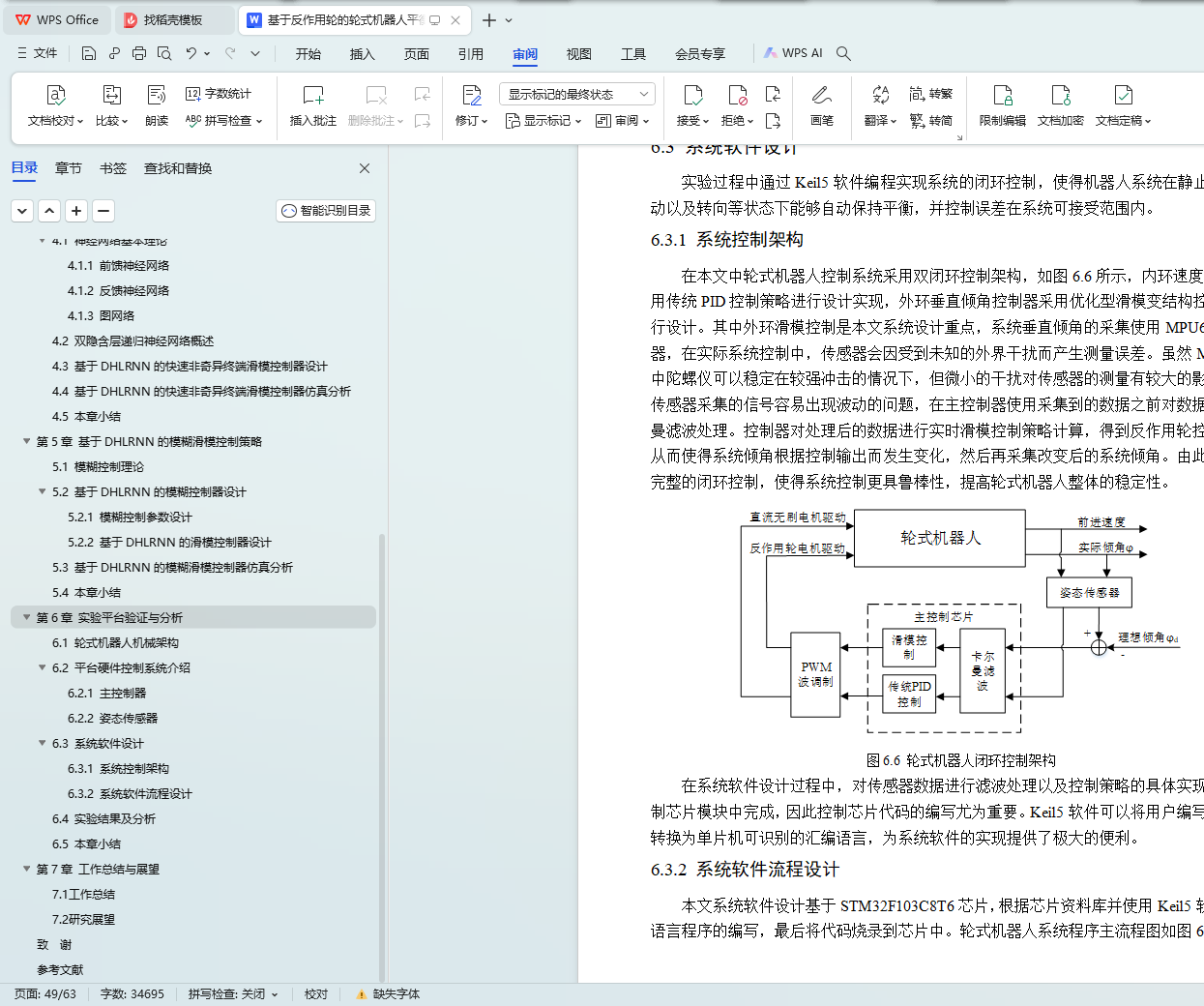
6.3.1 系统控制架构
6.3.2 系统软件流程设计
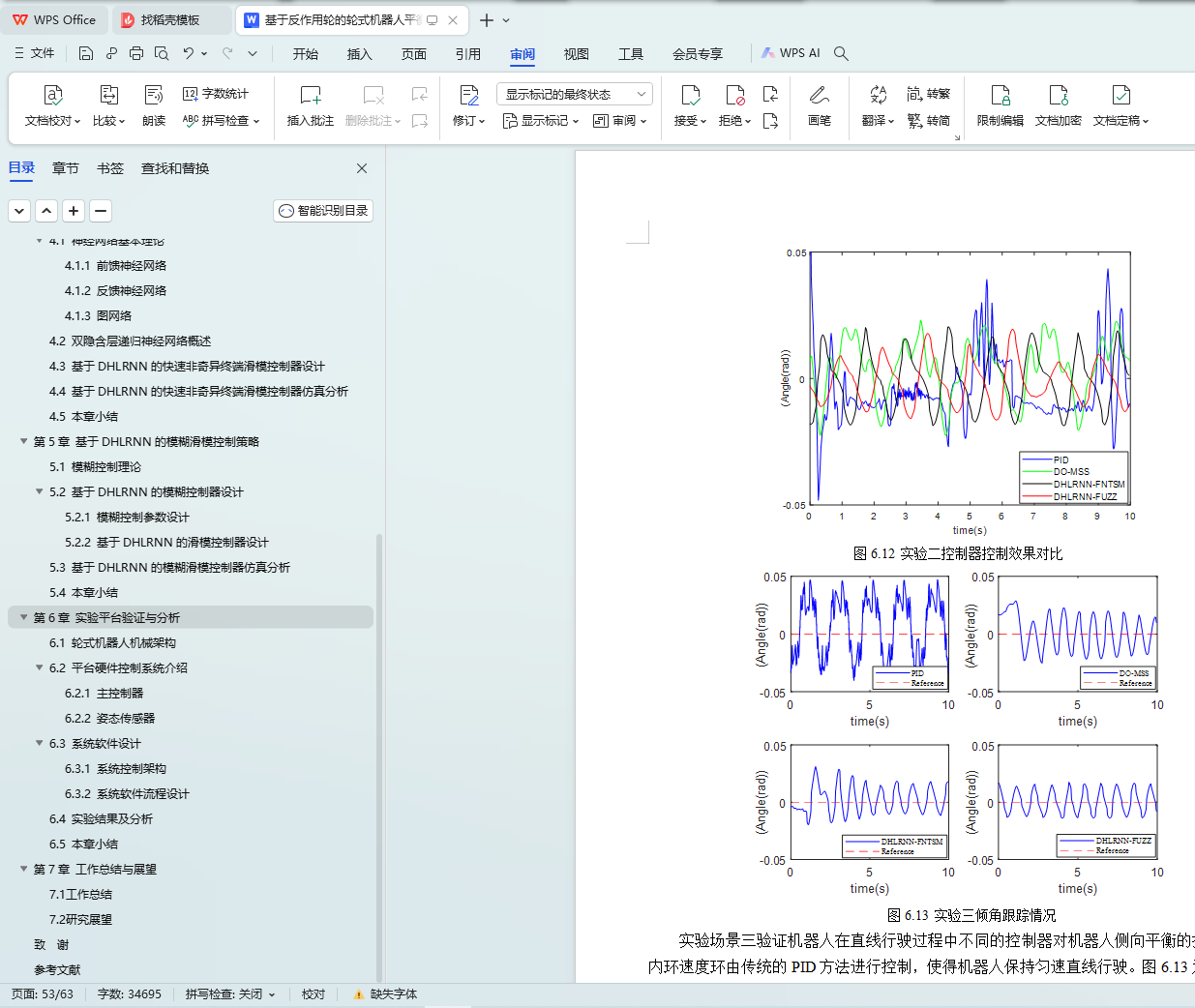
6.4 实验结果及分析
6.5 本章小结
第7章 工作总结与展望
7.1 工作总结
7.2 研究展望
致 谢
参考文献