
| 设计 任务书 文档 开题 答辩 说明书 格式 模板 外文 翻译 范文 资料 作品 文献 课程 实习 指导 调研 下载 网络教育 计算机 网站 网页 小程序 商城 购物 订餐 电影 安卓 Android Html Html5 SSM SSH Python 爬虫 大数据 管理系统 图书 校园网 考试 选题 网络安全 推荐系统 机械 模具 夹具 自动化 数控 车床 汽车 故障 诊断 电机 建模 机械手 去壳机 千斤顶 变速器 减速器 图纸 电气 变电站 电子 Stm32 单片机 物联网 监控 密码锁 Plc 组态 控制 智能 Matlab 土木 建筑 结构 框架 教学楼 住宅楼 造价 施工 办公楼 给水 排水 桥梁 刚构桥 水利 重力坝 水库 采矿 环境 化工 固废 工厂 视觉传达 室内设计 产品设计 电子商务 物流 盈利 案例 分析 评估 报告 营销 报销 会计 |
|
|
|
| 首 页 | 机械毕业设计 | 电子电气毕业设计 | 计算机毕业设计 | 土木工程毕业设计 | 视觉传达毕业设计 | 理工论文 | 文科论文 | 毕设资料 | 帮助中心 | 设计流程 |
您现在所在的位置:首页 >>计算机毕业设计 >> 文章内容 |
3.3 实验结果与分析 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 36 3.3.1 数据集 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 36 3.3.2 实验过程 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 38 3.3.3 结果与分析ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 39 3.4 本章小节 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 42 第 4 章 基于伪标签的多任务半监督学习方法 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 43
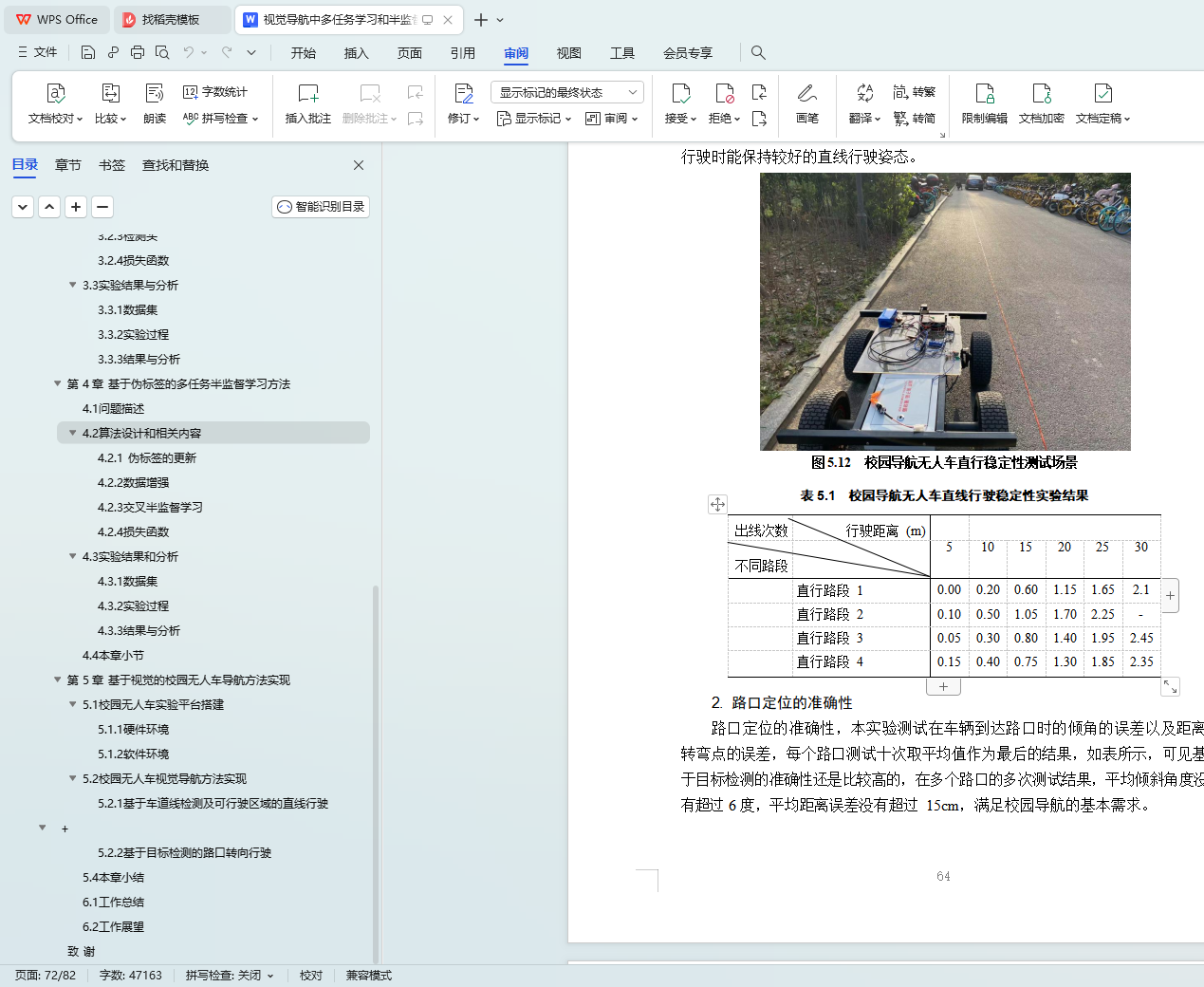
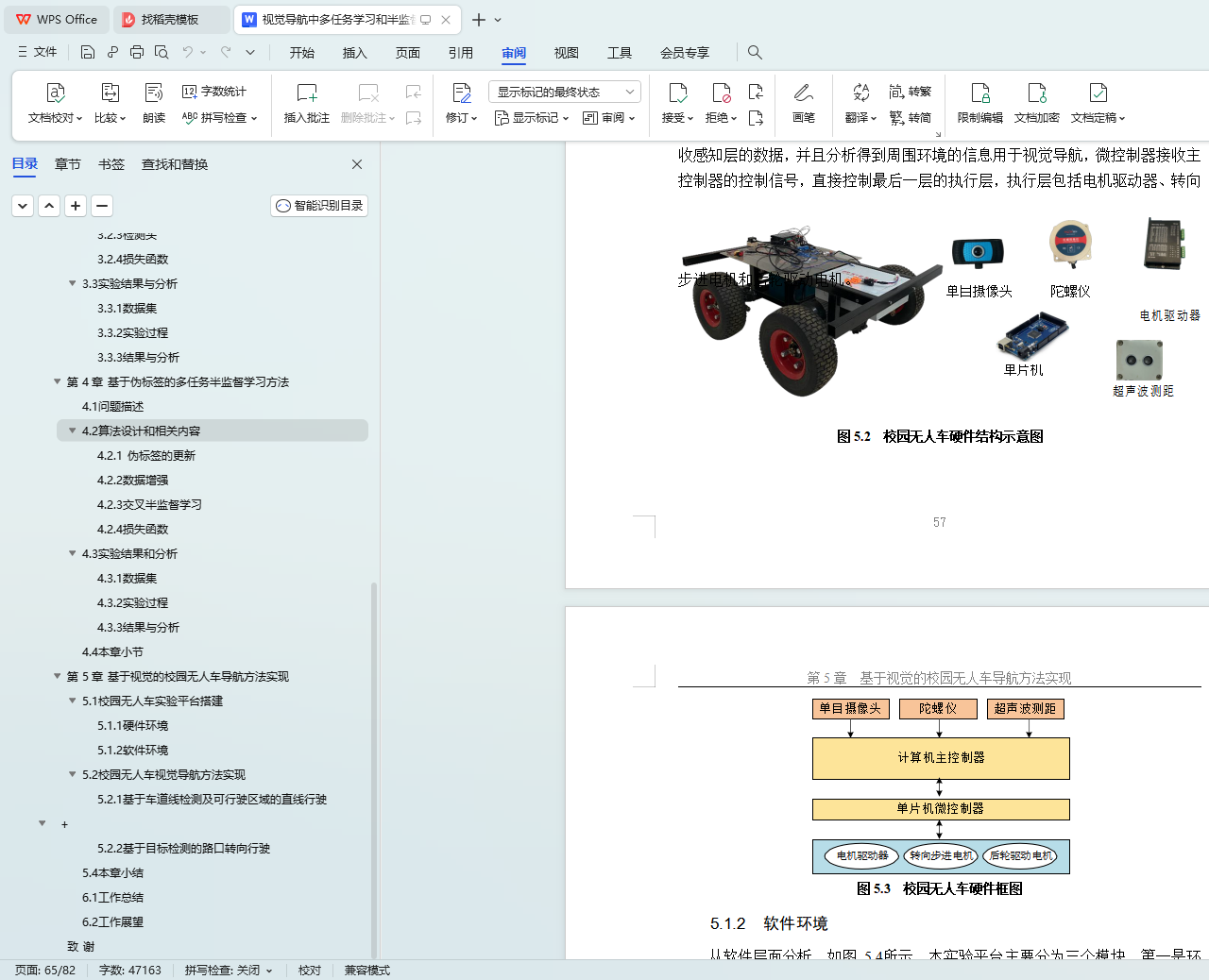
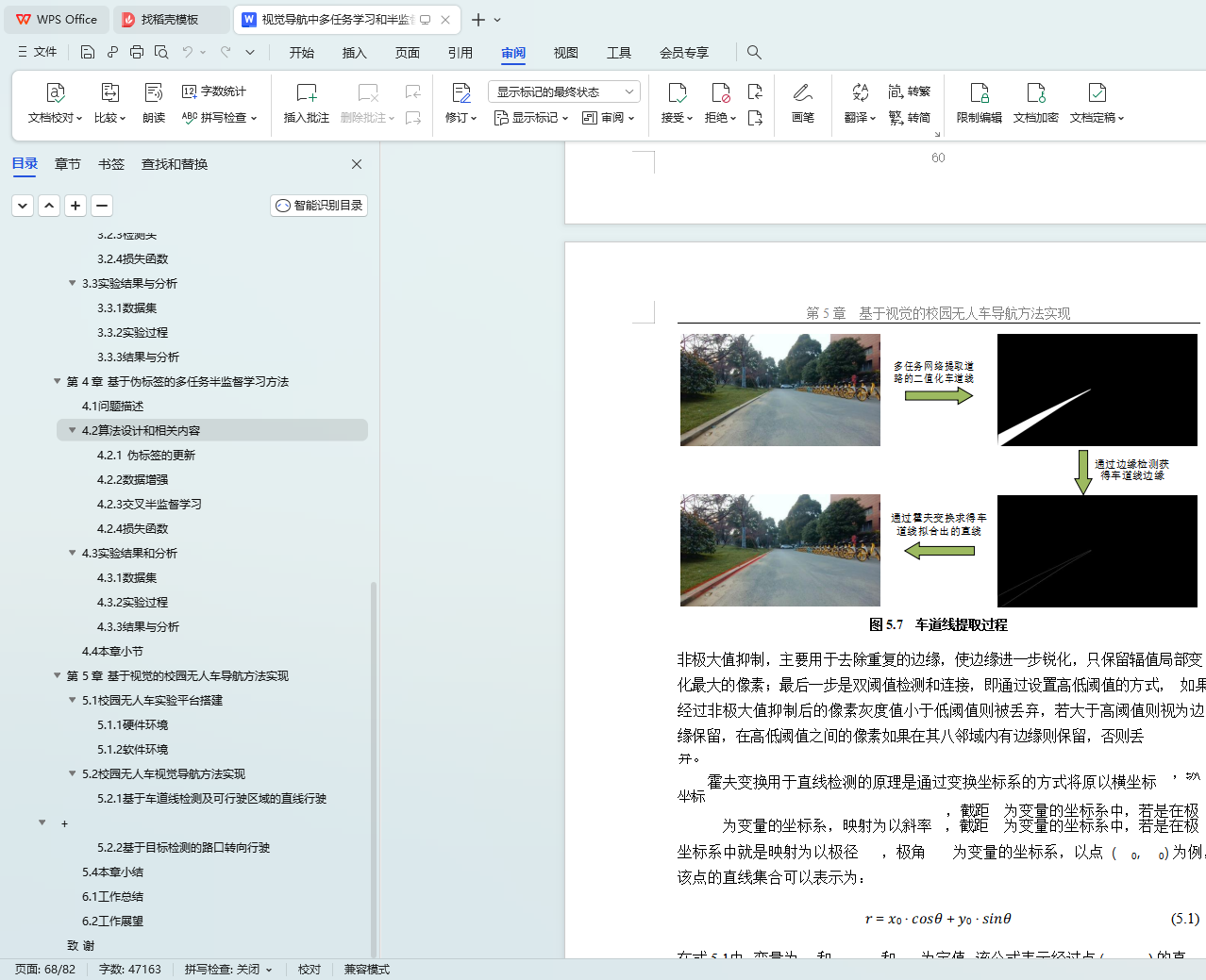
4.3.1 数据集 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 49 4.3.2 实验过程 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 49 4.3.3 结果与分析ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 50 4.4 本章小节 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 51 第 5 章 基于视觉的校园无人车导航方法实现 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 53 5.1 校园无人车实验平台搭建 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 54 5.1.1 硬件环境 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 54 5.1.2 软件环境 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 55 5.2 校园无人车视觉导航方法实现 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 56 5.2.1 基于车道线检测及可行驶区域的直线行驶 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 56 5.2.2 基于目标检测的路口转向行驶 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 59 5.3 实验结果 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 60 5.4 本章小结 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 62 第 6 章 总结与展望 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 63
摘 要视觉导航是当前深度学习研究的热门领域。环境感知作为视觉导航中最重要的模块之一,包括目标检测、车道线检测、可行驶区域分割等,是一项极具挑战性并具有深远意义的任务。传统的深度学习算法通常只解决环境感知中的一个检测任务,无法满足视觉导航同时感知多种环境因素的需求,因此多任务学习引起了研究人员的广泛关注。深度学习是以数据驱动的,然而数据标注的过程极为繁琐,在多任务学习中该问题更加凸显。半监督学习可有效利用大量未标注图片的特征,丰富训练数据集,提高模型检测效果。 本文围绕视觉导航中多任务学习和半监督学习开展相关研究,主要工作和成果如下: 1. 2. 针对多任务学习图像标注繁琐的问题,本文提出了一种基于伪标签的多任务半监督学习方法。首先本文对半监督训练方法 STAC 提出伪标签更新的改进,在训练过程中,教师模型和学生模型不断迭代,根据对未标注图片的推理结果对伪标签进行更新,其次本文结合一致性学习方法,采用两个结构相同初始化不同的网络进行交叉监督训练,引入一致性交叉损失计算损失函数。实验表明, 本文所提基于伪标签的多任务半监督学习方法优于监督训练方法和自训练方法 STAC。 3. 为了验证本文所提算法在视觉导航中的有效性,本文在科大西区搭建了校园无人车测试平台。实验表明,本文所提算法在校园视觉导航平台中对直线行驶纠偏和路口转向行驶起到了重要作用,满足了实际的工程需求。 关键词:多任务;环境感知;半监督学习;伪标签;视觉导航 ABSTRACTVisual navigation is a hot field of deep learning research. As one of the most important modules in visual navigation, environment perception is a very challenging and far-reaching task, including object detection, lane line detection, and drivable area segmentation. Traditional deep learning algorithms usually only solve one detection task in environmental perception, and cannot meet the needs of visual navigation to perceive multiple environmental factors at the same time. Therefore, the study of multi- task environmental perception has attracted extensive attention of researchers. Deep learning is data-driven, but the process of data labeling is extremely cumbersome, and this problem is even more prominent in multi-task learning. Semi-supervised learning can effectively utilize the features of a large number of unlabeled images, enrich the training data set, and improve the model detection effect. This thesis focuses on multi-task learning and semi-supervised learning in visual navigation. The main work and results are as follows: 1. -IoU to calculate the loss of target detection. Experiments show that the proposed multi-task environment perception algorithm is superior to other existing networks in both accuracy and speed. 2. Aiming at the tedious problem of multi-task learning image labeling, this thesis proposes a multi-task semi-supervised learning method based on pseudo-labels. First of all, this thesis proposes an improvement to the pseudo-label update for the semi- supervised training method STAC. During the training process, the teacher model and the student model are iterated continuously, and the pseudo-label is updated accord- ing to the inference results of unlabeled pictures. Secondly, this thesis combines the consistency learning method. Two networks with the same structure and different ini- tializations are used for cross-supervised training, and a consistent cross loss is intro- duced when calculating the loss function. Experiments show that the pseudo-label- based multi-task semi-supervised learning method proposed in this thesis outperforms the supervised training method and the self-training method STAC. 3. In order to verify the effectiveness of the algorithm proposed in this thesis in visual navigation, this thesis builds a campus unmanned vehicle test platform in the Western District of USTC. Experiments show that the algorithm proposed in this thesis plays an important role in the correction of straight-line driving and turning of inter- sections in the campus visual navigation platform, which meets the actual engineering needs. Key Words: Multitasking; Environment Perception; Semi-supervised Learning; Pseudo Labels; Visual Navigation 目 录摘 要 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ I Abstract ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ III 第 1 章 绪论ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 1 1.1 研究背景与意义 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 1 1.2 相关工作与研究现状ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 3 1.2.1 多 任 务 环 境 感 知 方 法 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 4 1.2.2 半监督学习方法 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 5 1.3 本文研究工作ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 6 1.4 本文组织结构ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 7 第 2 章 相关技术ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 9 2.1 卷积神经网络ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 9 2.1.1 卷积神经网络的发展过程ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 9 2.1.2 常见的卷积神经网络结构ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 12 2.2 目标检测 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 15
2.3 语义分割 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 18 2.4 车道线检测 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 20 2.5 半监督学习方法 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 21
2.6 本章小节 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 23 第 3 章 基于 YOLOv5 的多任务环境感知算法ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 25 3.1 问题描述 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 25 3.2 算 法 设 计 和 相 关 内 容 ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ ꞏ 26
本类最新文章
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
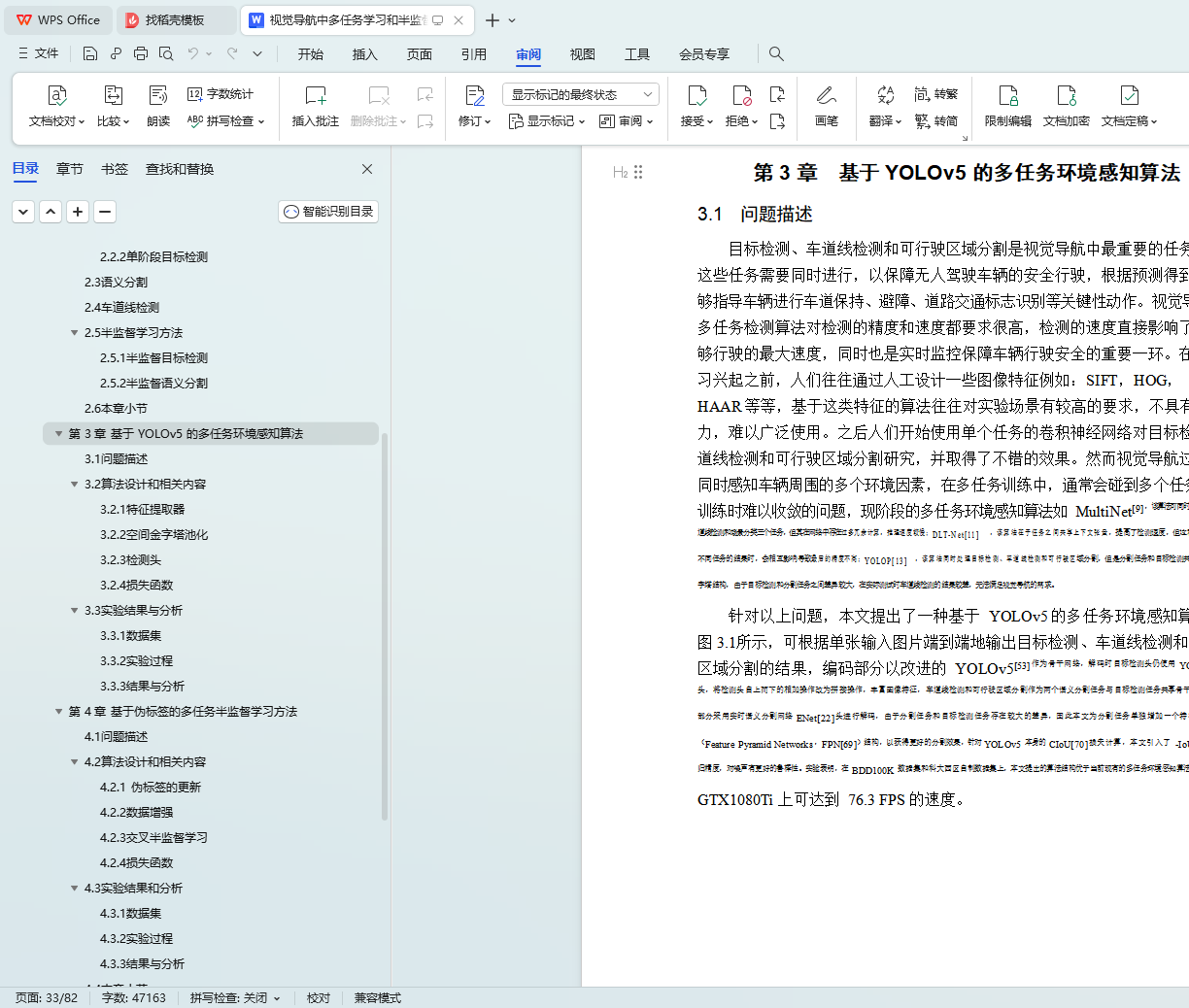
 In view of the low accuracy of the existing multi-task environment perception methods in visual navigation, this thesis proposes a multi-task environment perception algorithm based on YOLOv5, which can simultaneously complete the tasks of target detection, lane line detection and drivable area segmentation. The coding part of this al- gorithm uses CSPDarknet as the backbone network. By concatenating multiple pooling layers, the speed of spatial pyramid pooling is accelerated. The detection head of target detection adopts a top-down multi-scale structure. The detection head part of lane lines and drivable areas adopts the real-time semantic segmentation network ENet. In this thesis, a separate feature pyramid structure is designed for the semantic segmentation task, which improves the accuracy of lane line detection. The loss function calculation
In view of the low accuracy of the existing multi-task environment perception methods in visual navigation, this thesis proposes a multi-task environment perception algorithm based on YOLOv5, which can simultaneously complete the tasks of target detection, lane line detection and drivable area segmentation. The coding part of this al- gorithm uses CSPDarknet as the backbone network. By concatenating multiple pooling layers, the speed of spatial pyramid pooling is accelerated. The detection head of target detection adopts a top-down multi-scale structure. The detection head part of lane lines and drivable areas adopts the real-time semantic segmentation network ENet. In this thesis, a separate feature pyramid structure is designed for the semantic segmentation task, which improves the accuracy of lane line detection. The loss function calculation