|
一、毕业设计主要内容、研究意义及预期目标
1.研究意义
中国农作物种植面积和产量都居于世界前列,但同时也是农作物病虫害危害大国,国家“十四五”规划要求全力发展农业建设,建设智慧农业,防治农作物病虫害。
石榴是一种经济和药用价值都很高的优良果树。在中国医学百科全书(蒙医学)[1]中指出石榴有养胃,祛巴达干寒症,促进消化,促进食欲,止泻等功效;李国秀通过观测石榴皮多酚对实验鼠的作用[2],确定了石榴皮中的石榴皮多酚能提高小鼠肝脏中过氧化氢酶的活性;杨笑笑通过体外实验分别考察了鞣花酸的还原力和对DPPH、OH、O2等三种自由基的清除能力[3],结果表明鞣花酸具有强抗氧化活性,可作为天然抗氧化剂添加于化妆品中。
2020年我国石榴种植规模约175万亩(图1),年产量约100万吨(图2),种植面积和产量均为全球第一。但石榴因为温湿度、气候、降雨量、种植地势等原因,容易招致病虫害[4-7]:其中危害石榴的病害约20种[8-11],如:果腐病、炭疽病、褐斑病等;危害石榴的虫害约50种[9-11][6, 7][6][何平, 2015 #52;曲健禄, 2019 #51],如石榴茎窗蛾、石榴巾夜蛾等。石榴病虫害若不能及时发现并控制,将会在石榴产区大面积蔓延,造成亏产低质的严重后果。据云南省蒙自市不完整统计,2012年因水果实蝇造成的石榴损失就高达1.6亿元,因此石榴病虫害的识别、监测、预警是防灾减灾工作的关键之一。

图1 2020年全球石榴主产国种植面积
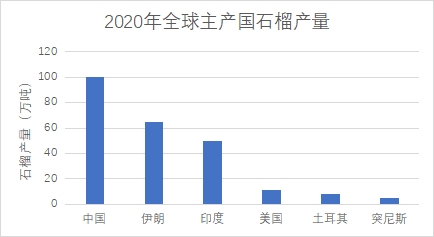
图2 2020年全球石榴主产国产量
目前石榴病虫害的识别、监测、预警以人工为主:主要靠人工记数或目测来获取这些特征信息。但是这种方法速度慢、实时性差、误差大、劳动强度大,并且部分病虫害如根腐病、结线虫病等具有隐蔽性,需要专业人员方能正确识别分类,严重降低了石榴病虫害的监测和防控效果;此外,年轻人并不青睐这种相对单调、辛苦的工作:农作物病虫害区域站的工作人员老龄化问题突出,40~50岁年龄段的工作人员居多,而40岁以下的人员较少[12]。诸多因素使得石榴病的预警、监测成本不断增加。因此迫切需要使用一种方法来代替人工识别。
2017年1月,在国家工信部发布的《物联网“十三五”规划》中指出:物联网将进入万物互联发展新阶段,社会管理方式和生产方式进一步走向向智能化、精细化、网络化方向转变。
而AGV作为柔性化程度和智能化程度相对较高的产品,越来越多地被应用于汽车制造、物流搬运、工厂巡检、医药等领域[13-16][8, 9]。从国内AGV销售量数据来看,目前国内AGV机器人增长速度较快, 2015年到2019年期间,虽然AGV销售增涨速度逐步下降,但是其增长速度依旧高达约20%,即使是2019年到2021年期间AGV销售受到疫情影响,AGV机器人也保持了近20%的增速。
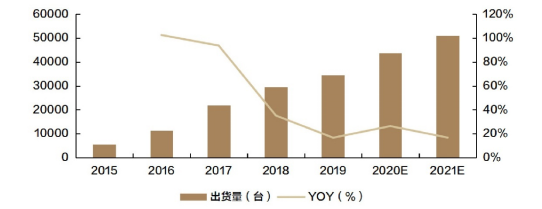
图3 2015年到2021年国内出售量
截至2022年,已经有AGV应用到农业上的研究:吴应新、吴剑桥等针对丘陵山地等地形处的果园的特点,例如:地形复杂、面积范围广、壕沟多,建立了其地面模型,同时从混合动力设计出发,搭建了一种用于果园AGV的运动控制与能量管理的仿真平台[17];谢永良基于滚动优化原理提出AGV绕行静态障碍物、减速或停车避让动态障碍物的导航算法[18],模拟试验结果表明,该算法能够避免AGV与障碍物发生碰撞,验证了避障导航算法的有效性;李诀基于磁导方式,采用分段模糊PID控制原理[19],实现轻型农用AGV的循迹导引与控制,并且改进了普通PID算法在循迹过程中响应超调量大、时间慢等问题。

图4 2011-2018年中国移动机器人(AGV)市场新增量及增长情况
2.研究的主要内容
AGV导航是实现AGV导引的关键技术,AGV导航技术的发展与否也直接影响到了AGV导引的可靠性。目前,AGV主要的导航方式有光学导航、磁导航、惯性导航、GPS导航、激光导航、视觉导航等多种导航技术[28]。
结合石榴果园病虫害巡检的实际需求,本选题提出一种基于磁导航和NFC读取定位的节点式的导航技术,并进行研究。
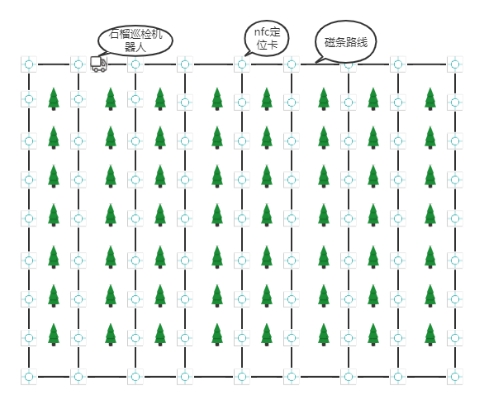
图5 导航地图示意图
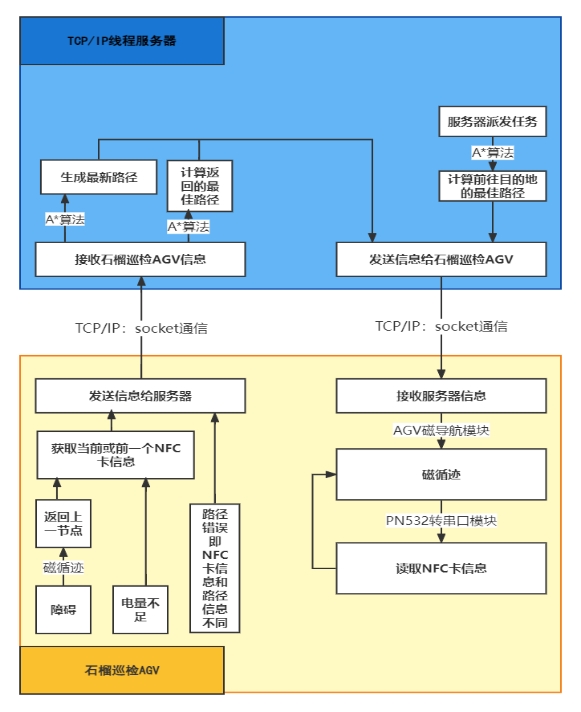
3.本选题主要有以下三个研究内容:
(1)AGV的最佳路径算法设计。结合石榴果园的地图模拟情况,把地图作为无向图导入服务器中。然后对A*算法、Dijkstra最短路径算法、弗洛伊德算法进行验证,通过对比选取合适的算法。
(2)AGV引导程序设计。分析目前AGV磁导航算法的优劣,选择或改良一种算法,提高其控制精度。为保证能正确读取到NFC卡的信息,通过测试判断石榴巡检AGV的行驶速度。
(3)TCP/IP服务器设计。为保证服务器和AGV小车的通信效率,设计合理的信息格式。设计为多线程或多进程服务器,合理利用服务器算力资源。
4. 预期目标
(1)AGV小车能够获取服务器派发下来的任务。
(2)服务器能够计算出此次任务的最佳路径。
(3)AGV小车能够根据派发的任务执行相应的循迹任务。
(4)AGV小车通过读取nfc卡信息确定自己的位置。
(5)AGV小车能够实现避障功能,并在这之后重新获取绕过障碍到目标地址的最佳路径。
|
|
五、参考文献
[1] 白清云主编;苏荣扎布,苏和毕力格,(口戈)拉僧副主编.中国医学百科全书蒙医学.上海:上海科学技术出版社.1992
[2] 李国秀.石榴多酚类物质的分离鉴定和抗氧化活性研究[D].陕西师范大学, 2008.
[3] 杨笑笑.石榴中活性物质的提取及应用研究[D].江南大学,2014
[4] 李敏.突尼斯软籽石榴冻旱的发生与预防[D].山东农业大学,2013
[5] 李瑞.石榴主要病虫害发生规律及其防治技术[J].农业灾害研究,2021, 11(08):174-5
[6] 赵作富,刘芝棠.石榴裂果的原因及防治措施[J].农业科技通讯,2010,(07): 236-7
[7] ROTIM,NINO,OSTOJIĆ,ea tl.Significant pests of the pomegranate tree on the territory of Herzegovina[J].Glasnik Zaštite Bilja,2017
[8] 杜明华.石榴常见病害症状与防治[J].乡村科技,2012,(04):21
[9] 何平,余爽,陈建雄等.四川石榴病虫害及绿色防控技术[J].中国植保导刊, 2015,35(09):20-3
[10] 曲健禄,范昆,付丽等.山东省石榴病虫害发生种类调查及防治现状[J].中国果树,2019,(02):105-7
[11] 周增强,侯珲,王丽等.郑州地区石榴主要病虫害种类与绿色防控技术[J].果农之友,2019,(10):32-4
[12] 陈桂华,张发成,葛翔等.农作物病虫害区域站建设的现状、问题和对策,F, 2012[C]
[13] 刘品言,张川,赵剑等.AGV小车在汽车涂装生产线上的应用[J].电镀与涂饰, 2022,41(20):1489-92
[14] 吕玉江,孟召军,杨伟等.AGV关键技术在航空制造车间的应用展望[J].航空科学技术,2021,32(07):1-11
[15] 邢艳,杨云鹏.基于智慧物流概念下的复合型AGV的设计与研究;proceedings of the 第十七届沈阳科学学术年会,中国辽宁沈阳,F,2020[C]
[16] 于赫年,白桦,李超.仓储式多AGV系统的路径规划研究及仿真[J].计算机工程与应用,2020,56(02):233-41
[17] 吴应新,吴剑桥,杨雨航等.油电混合果园自动导航车控制器硬件在环仿真平台设计与应用[J].智慧农业(中英文),2020,2(04):149-64
[18] 谢永良,尹建军,余承超等.轮式AGV沿葡萄园垄道行驶避障导航算法与模拟试验[J].农业机械学报,2018,49(07):13-22
[19] 李诀,邹大鹏,王高杰等.轻型农用运输AGV的设计与分段模糊控制研究[J].广东工业大学学报,2022,39(01):78-84
[20] 蔡佳成.基于激光雷达与视觉图像的AGV导航方法研究与实现[D].西南科技大学,2022
[21] 康志昊.自动导引小车AGV自适应避障策略的研究与实现[D].华南理工大学, 2016
[22] 卯彦.电磁导引AGV单机控制研究及软件实现[D].昆明理工大学,2006
[23] 张伟.智能包装印刷工厂AGV多信息融合自主导航技术研究[D].西安理工大 学,2021
[24] 张辰贝西,黄志球.自动导航车(AGV)发展综述[J].中国制造业信息化,2010, 39(01):53-9
[25] 徐军.基于射频识别和陀螺仪导引的AGV研究[D].济南大学,2016
[26] MAN Z G,YE W H,ZHAO P等.Research on RFID and Vision-Based AGV Navigation [J]. Advanced Materials Research,2010,1015(136-136)
[27] KIM J G,KIM D H,JEONG S K等.Development of Navigation Control Algorithm for AGV Using D* search Algorithm[J].International Journal of Science and Engineering,2013,4(2)
[28] 杨文华.AGV技术发展综述[J].物流技术与应用,2015,20(11):93-5
|