|
һ����ҵ�����Ҫ���ݡ��о����弰Ԥ��Ŀ��
1.�����
2017��1�£����ҹ��Ų������ˡ���������ʮ���塰�滮�����ص�ָ�������������������ﻥ����չ�½Σ������������������ʽ��һ�������ܻ�����ϸ�������绯����ת�䣬������ᷢչ�������ܡ���Ч�����Ż�����������,�ٽ��˵��̵Ŀ��ٷ�չ,������ҵ�ķ�չʮ��Ѹ�١�

���ſ������Ѹ�����ӣ���ͳ�����������Ѳ��������г�������
�ڴ�ͳ�������˳����в��õ����˹�����,����Ч�ʵ���,ͬʱ�ּ�Ч�ʵ͡������ʸ�,����������Ŀǰ������Ʒ���������ּ䡣����,�ҹ��˿����仯�̶�����,�������˲��������������ˡ��ּ�����������Ե���������Ĺ�����ʹ���Ͷ����ɱ�����������ˡ����������Ҫʹ��һ�ַ����������˹����ˡ�
2016��12��,�������������Ͼ���ʽ����,���ҹ��Ų��ڴ��ڼ乫���ˡ��й���������ʮ����滮��,������������ܻ�/���ֻ�����,�Ѵ�ͳ�Ĺ��������ܻ��豸����ת�͡��ɴ˿ɼ�,�����ִ�������ܻ����İ��˷ּ��Ѿ���Ϊ���˷ּ�δ���ķ�չ����֮һ�������˻�������Ϊһ�ָ�Ч�ʣ��ͳɱ��İ��ˡ��ּ�����ˣ����п�������˹����ˡ��ּ�
���˻�������һ�ּ���Ƭ������������Ϣ�������ݴ����������˶������㷨�ȶ��ּ�����һ����ۺ�ϵͳ[1]�����������ܹ�����Ԥ���趨�õ�·�߳����Զ���ҵ��������������ϻ��߹��ߵ��˶���ָ����λ��,���˻��������ִ���ҵ�Զ�������ϵͳ�еĹؼ��豸֮һ[2]�������˻����������ڲִ���������ϵͳ�У������ܽ��Ͱ��˵ijɱ������ܼӿ���˵��ٶȲ�����ijЩ��������������������ɵİ�����ҵ��
2. �о�����Ҫ����
�ٰ��˻����˹�ѧ������
�����·���㷨��
������ͷ��ȡ��ά�롣
�ܴӶ�ά���ȡ������Ϣ��ȷ��Ŀ��λ�á�
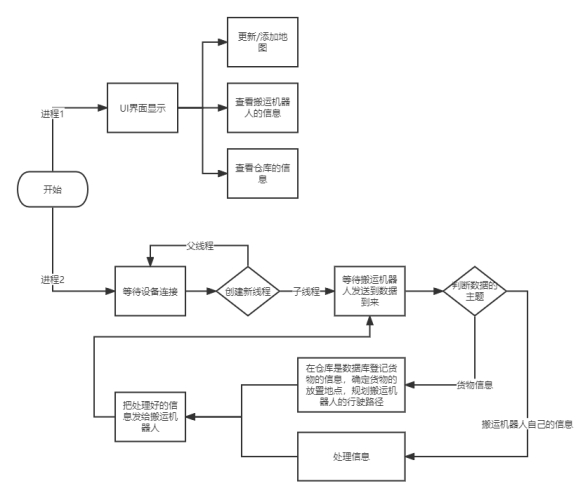
�ݴTCP���̷߳����������ڸ��µ�ͼ��·���Ĺ滮���ֿ�������ַ�����
��nfc��Ϣ��д��
3. Ԥ��Ŀ��
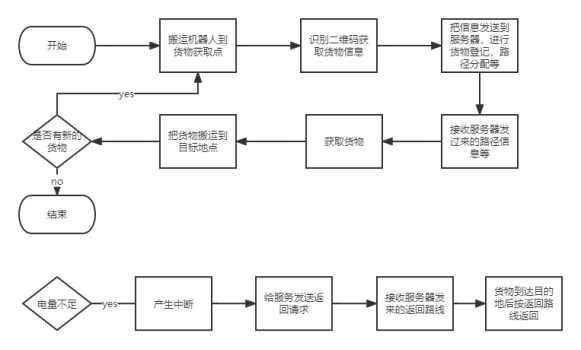
�ٰ��˻����˴ӻ����ȡ��ʶ���ά�룬��ȡ�յ���Ϣ��
�ڰ��˻����˻�ȡ�û��
�ۼ��㵽�յ�����·����
��ͨ����ȡnfc��Ϣȷ�����˻�����λ��
�ܰѻ����͵��յ㡣
|