摘 要
永磁同步电机(PMSM)因其功效高、损耗低、过载性能好等优势,近年来带来了电机市场的崛起和现代驱动应用(如智能家电、农业设备、电动汽车等)的壮大。但PMSM作为经典的多参数非线性强耦合系统,容易受到参数摄动、磁饱和受限、外界扰动等因素的影响,从而降低系统控制特性。因此,研究针对扰动影响而设计的强鲁棒控制策略对PMSM系统受控品质的提升具有重大意义。
本文以PMSM系统作为受控对象,根据电机运作原理分析电流矢量与电机转速的内在联系,提出标称项和扰动项相结合的控制模型,设计了以滑模控制主导外转速环,PI控制主导内电流环的内外闭环控制系统。
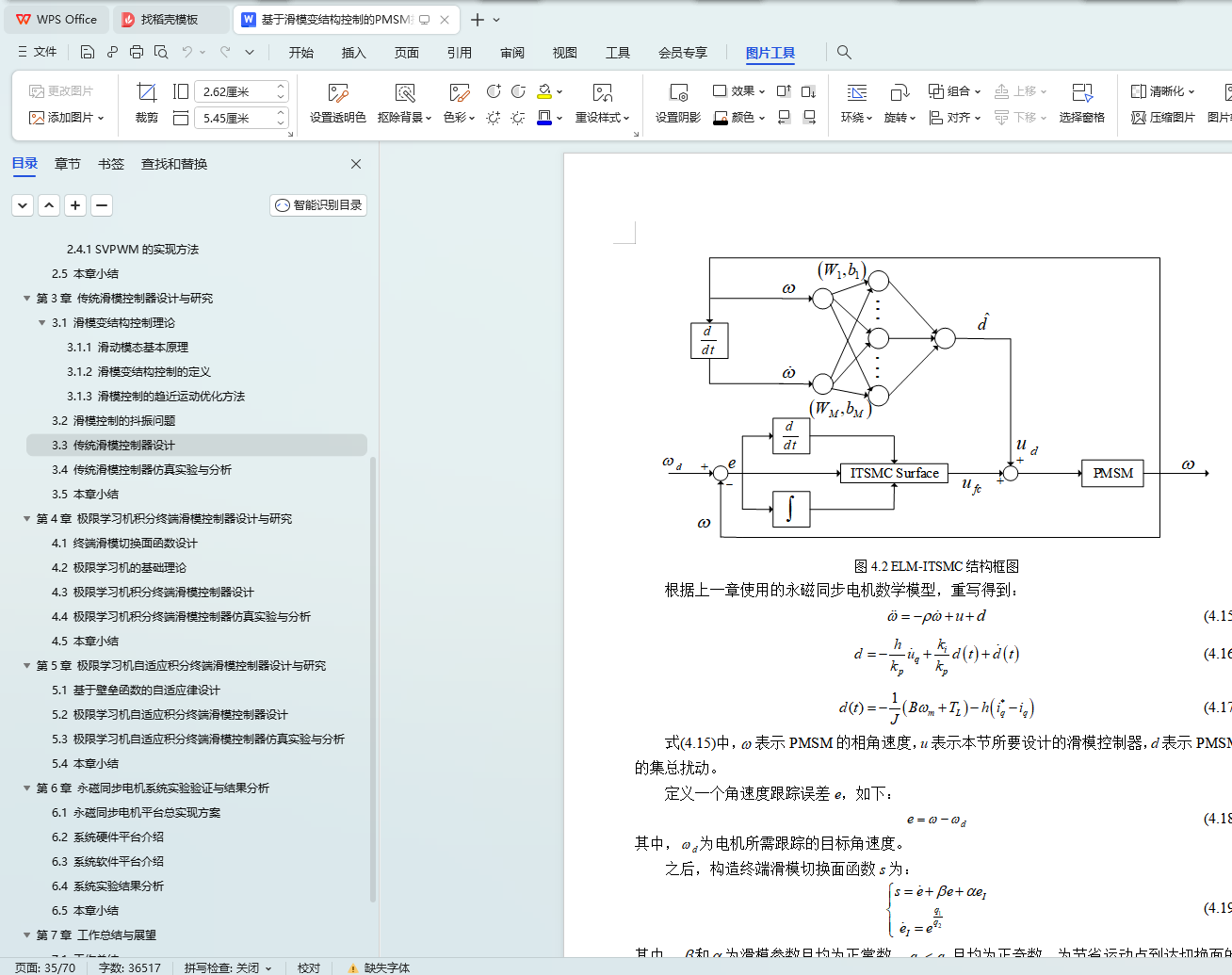
针对PMSM系统易受各类因素影响的缺点以及传统滑模控制本身存在的问题,提出将极限学习机(ELM)作为扰动观测器引入滑模控制策略的方法,设计了极限学习机积分终端滑模控制器。根据神经网络自适应训练算法驱使ELM输出逼近时变未知扰动,通过前向补偿输入电机的损失量值来达到提升品控的目的。
针对ELM观测输出的时延问题,以传统趋近律无法兼得趋近速度和被控品质为突破口,提出一种基于壁垒函数的新型自适应律,设计了一款新型极限学习机自适应积分终端滑模控制器。该控制器基于容错特性,实时跟踪滑模函数变量值,依据变量状态所处的运动阶段使用相对应的控制输出,保证PMSM系统的转速跟踪误差可实现快速收敛的同时又能得到良好的滑动模态品质。同时用李亚普诺夫稳定性理论对所设计控制器的进行了证明。
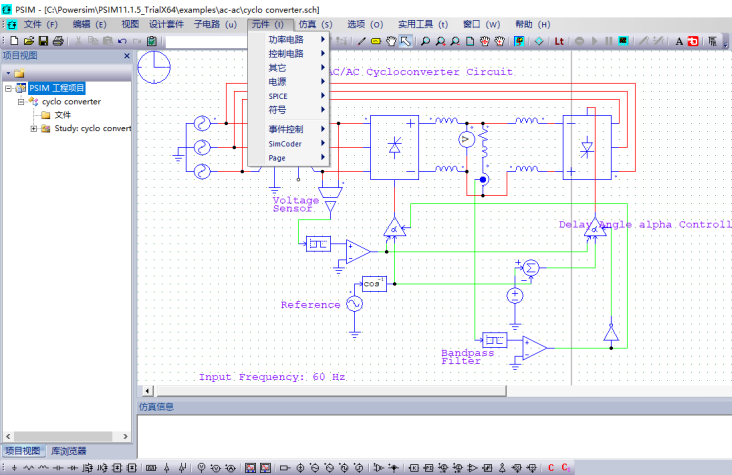
选择PSIM软件作为实测软件平台,搭建PMSM主电路以及四种控制器电路进行仿真,并利用DSP芯片对PMSM系统进行实物验证。根据实测数据,验证了本文设计的新型控制器在各响应性能上都具备了一定的优越性。
关键词:PMSM、滑模变结构控制、ELM、壁垒函数、自适应律控制
ABSTRACT
Permanent magnet synchronous motor ( PMSM ) has the advantages of high efficiency, low loss and good overload performance. In recent years, it has brought the rise of the motor market and the growth of modern drive applications ( such as smart home appliances, agricultural equipment, electric vehicles, etc. ). However, as a classical multi-parameter nonlinear strong coupling system, PMSM is easily affected by parameter perturbation, magnetic saturation limitation, external disturbance and other factors, thus reducing the control characteristics of the system. Therefore, it is of great significance to study the strong robust control strategy designed for the disturbance effect to improve the controlled quality of PMSM system.
In this paper, the PMSM system is used as the controlled object. According to the operation principle of the motor, the internal relationship between the current vector and the motor speed is analyzed. A control model combining the nominal term and the disturbance term is proposed. An internal and external closed-loop control system with sliding mode control leading the external speed loop and PI control leading the internal current loop is designed.
Aiming at the shortcomings of PMSM system susceptible to various factors and the problems of traditional sliding mode control itself, a method of introducing extreme learning machine ( ELM ) as a disturbance observer into sliding mode control strategy is proposed, and an extreme learning machine integral terminal sliding mode controller is designed. According to the neural network adaptive training algorithm, the ELM output is driven to approximate the time-varying unknown disturbance, and the purpose of improving the quality control is achieved by forward compensation of the loss value of the input motor.
Aiming at the time delay problem of ELM observation output, an adaptive law control based on barrier function is proposed, and an extreme learning machine adaptive integral terminal sliding mode controller is designed. Based on the fault-tolerant characteristics, the controller tracks the variable value of the sliding mode function in real time, and uses the corresponding control output according to the motion stage of the variable state to ensure that the speed tracking error of the PMSM system can achieve fast convergence while obtaining good sliding mode quality. At the same time, the stability of the designed controller is proved by Lyapunov function.
PSIM software is selected as the test software platform to build the main circuit of PMSM and four kinds of controller circuits for simulation, and DSP chip is used to verify the PMSM system. According to the measured data, it is verified that the new controller designed in this paper has certain advantages in each response performance.
Keywords: PMSM, Sliding Mode Variable Structure Control, ELM, Barrier Function, Adaptive Law Control
目 录
摘 要
ABSTRACT
第1章 绪论
1.1 研究背景及意义
1.2 国内外研究现状
1.3 本文研究内容及结构
第2章 永磁同步电机控制系统
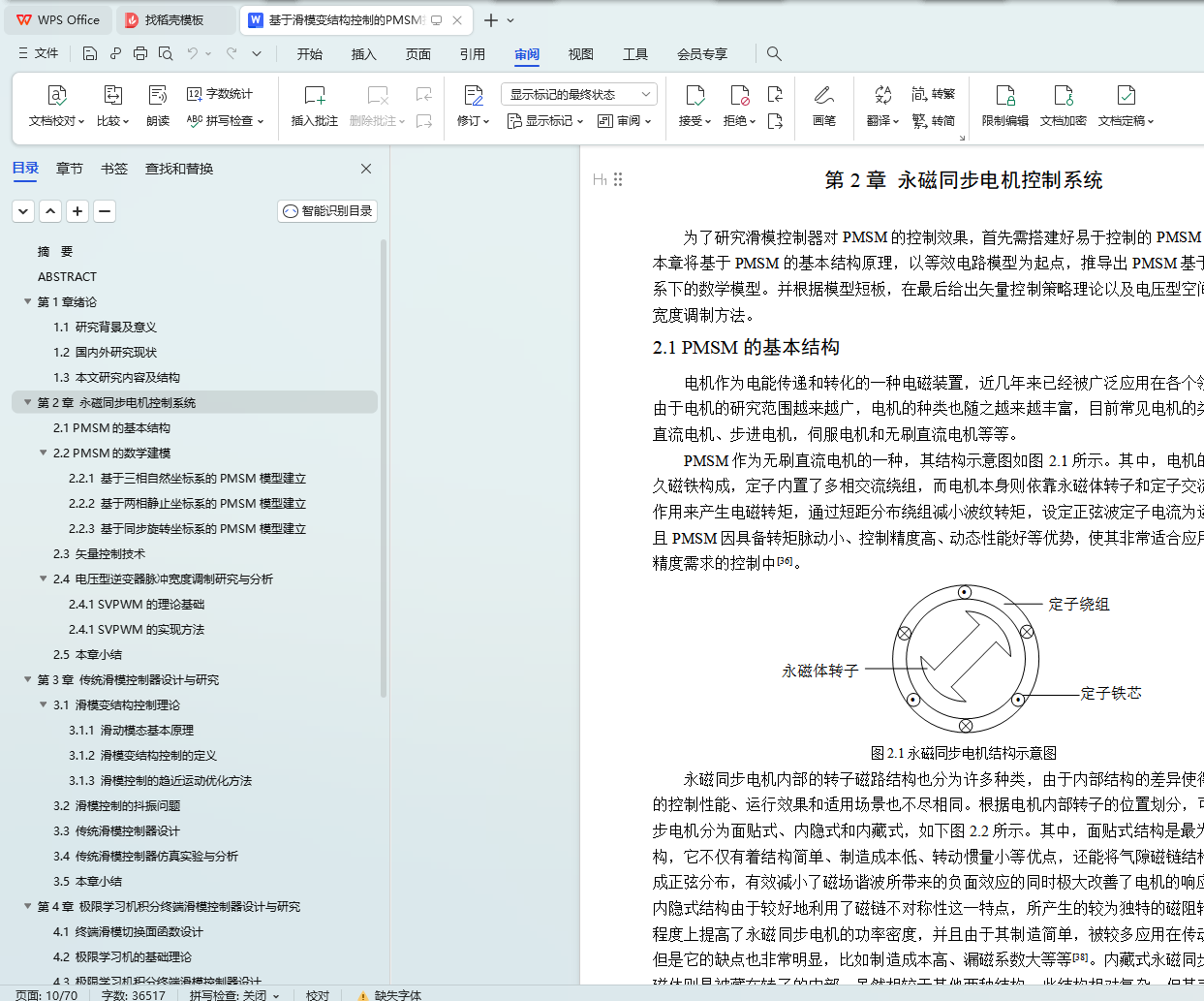
2.1 PMSM的基本结构
2.2 PMSM的数学建模
2.2.1 基于三相自然坐标系的PMSM模型建立
2.2.2 基于两相静止坐标系的PMSM模型建立
2.2.3 基于同步旋转坐标系的PMSM模型建立
2.3 矢量控制技术
2.4 电压型逆变器脉冲宽度调制研究与分析
2.4.1 SVPWM的理论基础
2.4.1 SVPWM的实现方法
2.5 本章小结
第3章 传统滑模控制器设计与研究
3.1 滑模变结构控制理论
3.1.1 滑动模态基本原理
3.1.2 滑模变结构控制的定义
3.1.3 滑模控制的趋近运动优化方法
3.2 滑模控制的抖振问题
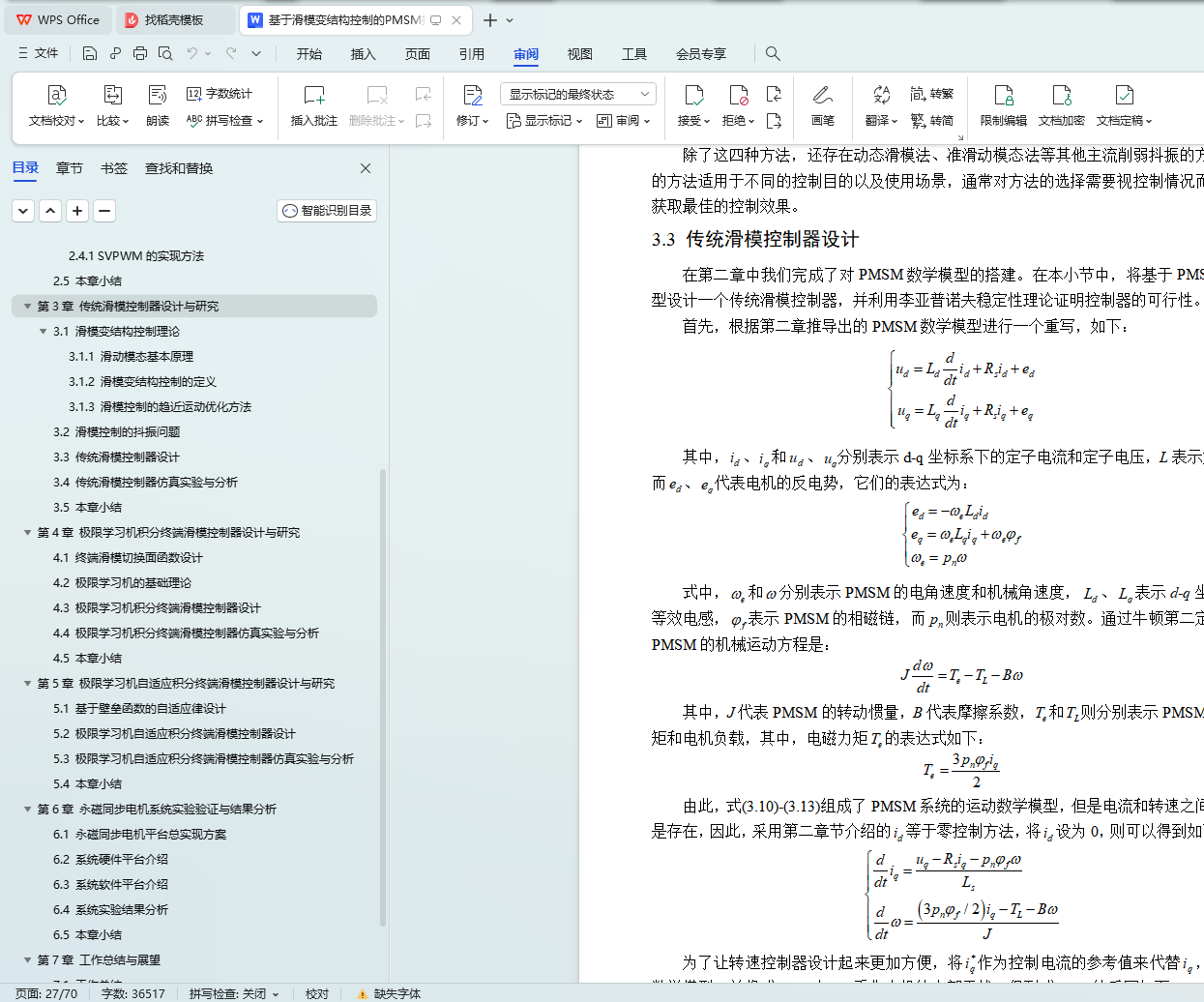
3.3 传统滑模控制器设计
3.4 传统滑模控制器仿真实验与分析
3.5 本章小结
第4章 极限学习机积分终端滑模控制器设计与研究
4.1 终端滑模切换面函数设计
4.2 极限学习机的基础理论
4.3 极限学习机积分终端滑模控制器设计
4.4 极限学习机积分终端滑模控制器仿真实验与分析
4.5 本章小结
第5章 极限学习机自适应积分终端滑模控制器设计与研究
5.1 基于壁垒函数的自适应律设计
5.2 极限学习机自适应积分终端滑模控制器设计
5.3 极限学习机自适应积分终端滑模控制器仿真实验与分析
5.4 本章小结
第6章 永磁同步电机系统实验验证与结果分析
6.1 永磁同步电机平台总实现方案
6.2 系统硬件平台介绍
6.3 系统软件平台介绍
6.4 系统实验结果分析
6.5 本章小结
第7章 工作总结与展望
7.1 工作总结
7.2 研究展望
致 谢
参考文献
附 录