摘要
自平衡小车近年来出现在消费市场,人们开始接受这一种新的承重、代步、运输交通工具。相对于传统的交通工具,两轮平衡小车具有许多优点,转向空间小;可实现原地任意角度旋转;相对传统交通工具有着低功耗特点。通过对平衡小车的研究,实现一个读取陀螺仪,电机编码器采用stm32的电机驱动控制系统。该平衡小车可以实现无干扰情况下自主实现平衡,转向,加减速等控制;同时实现避障和巡线等功能。
关键词 PID控制 陀螺仪 避障巡线
Abstract
In recent years, self-balanced automobiles have appeared in the consumer market. People begin to accept this new way of carrying, transporting and transporting. Compared with traditional vehicles, the two-wheel balancing vehicle has the advantages of small steering space, arbitrary rotation in situ and low power consumption. Through the research of the balancing car, the reading gyroscope is realized, and the motor encoder adopts STM32 motor drive control system. Balancing car can achieve self-balancing, steering, acceleration and deceleration control without disturbance, while achieving obstacle avoidance and line patrol functions.
Keywords PID Algorithm gyroscope obstacle avoidance patrol
目录
1. 绪论
1.1 研究意义及背景
1.2 本文主要研究内容及任务
2. 系统概述
2.1 控制系统要求分析
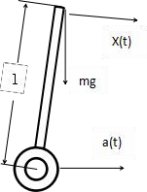
2.2 平衡小车控制原理分析
2.3 自平衡小车PID控制器分析
2.3.1 PID控制原理
2.3.2 PID控制器设计
3. 系统硬件电路设计
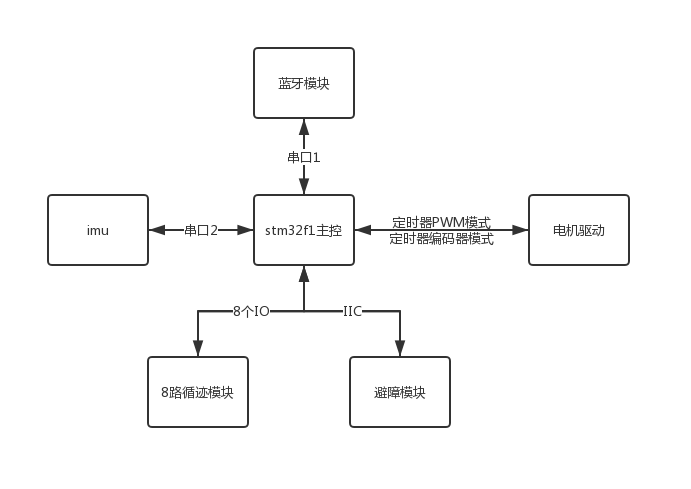
3.1 硬件电路整体框架
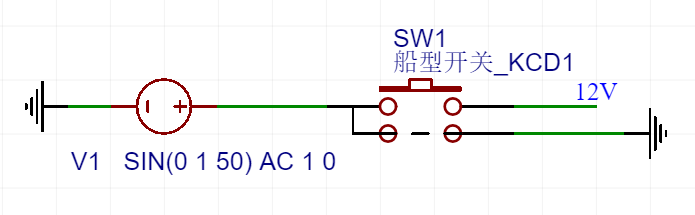
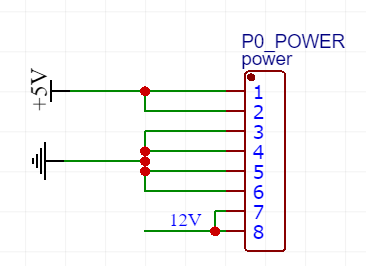
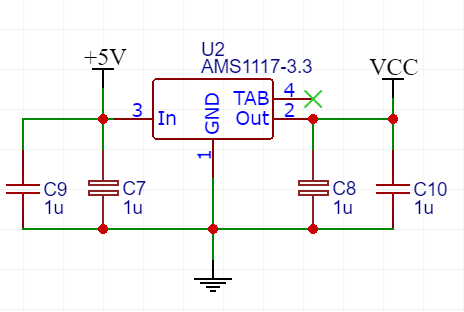
3.2 电源供电部分
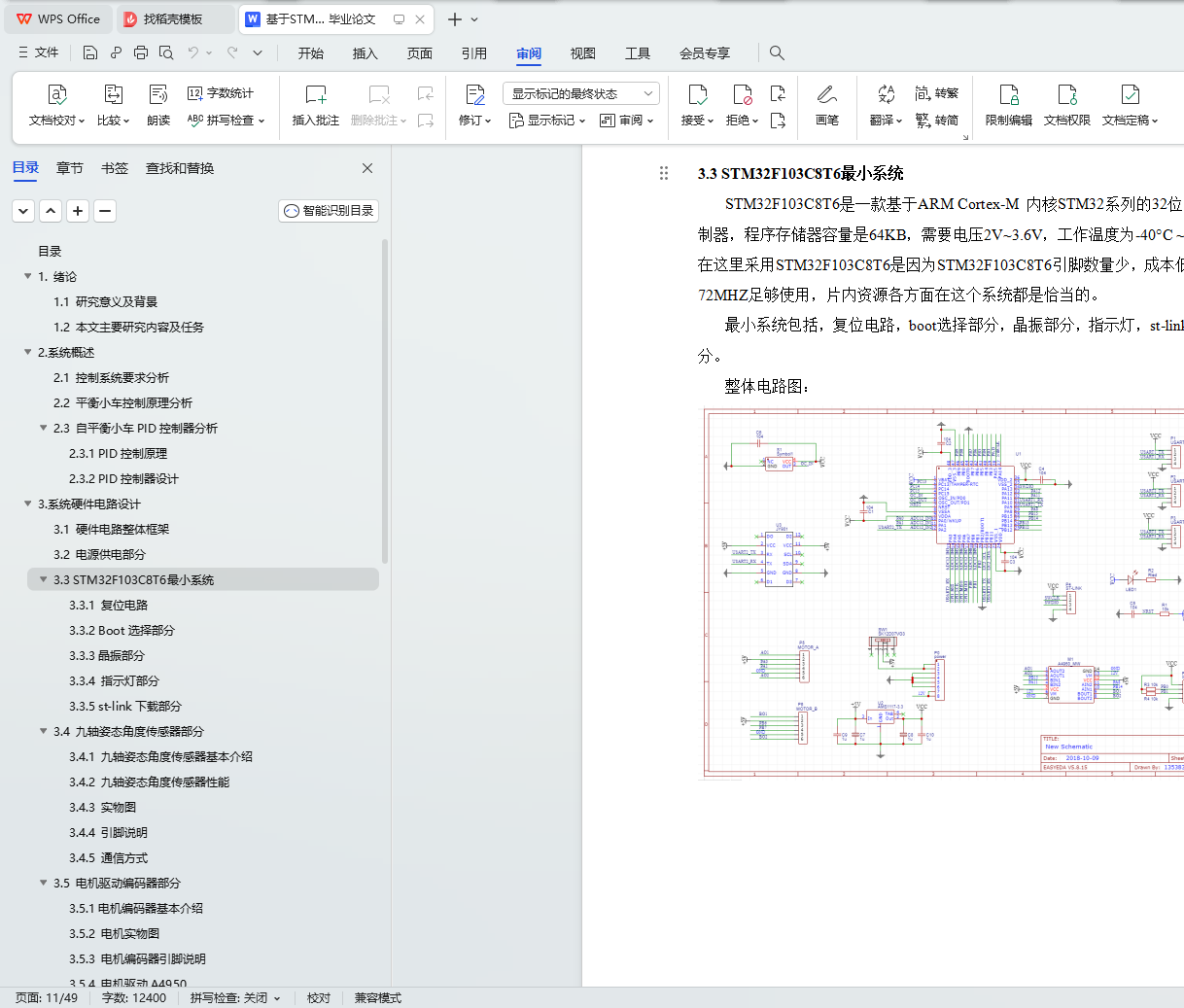
3.3 STM32F103C8T6最小系统
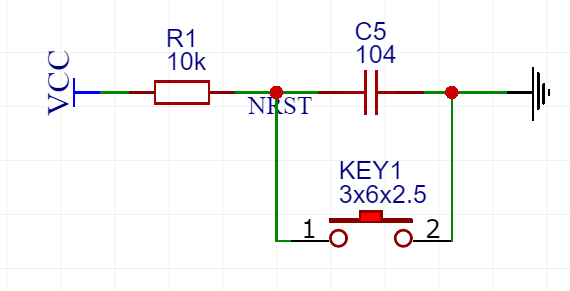
3.3.1 复位电路
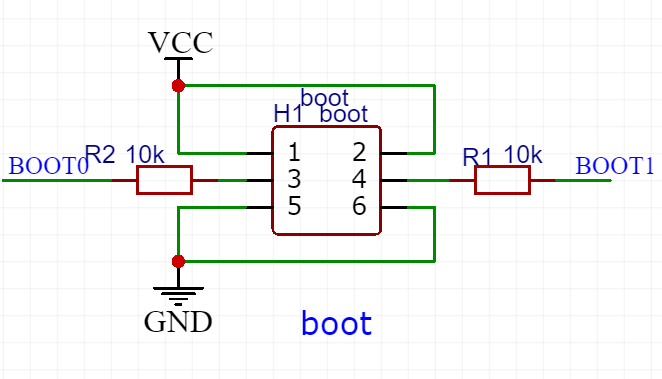
3.3.2 Boot选择部分
3.3.3晶振部分
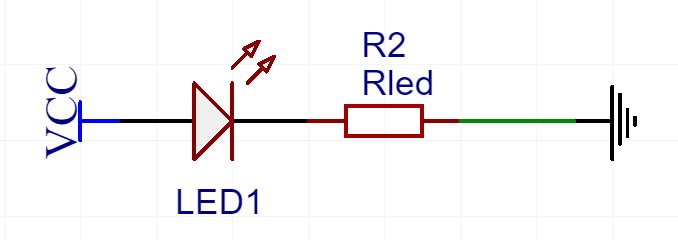
3.3.4 指示灯部分
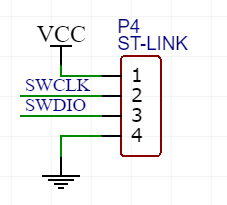
3.3.5 st-link下载部分
3.4 九轴姿态角度传感器部分
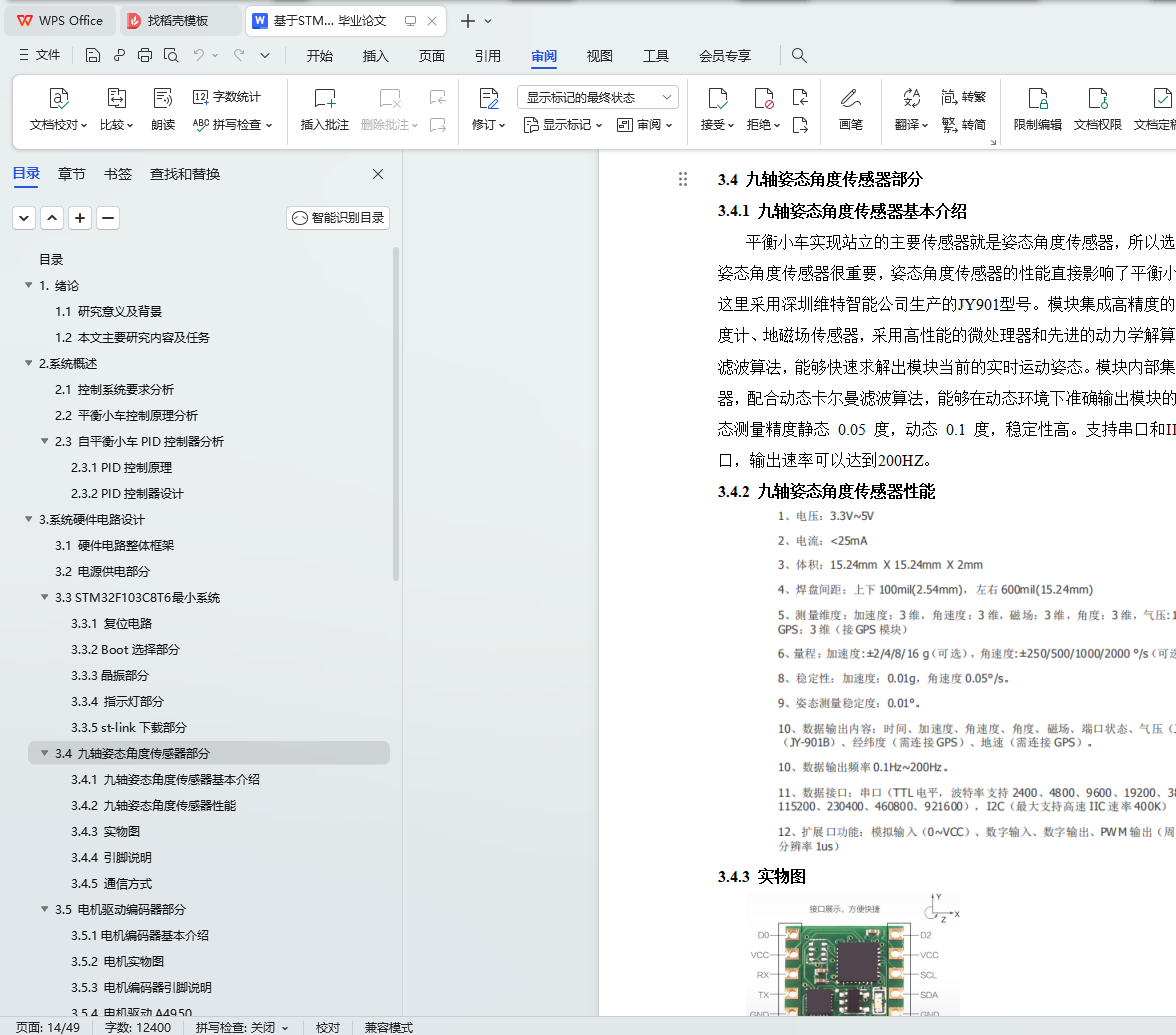
3.4.1 九轴姿态角度传感器基本介绍
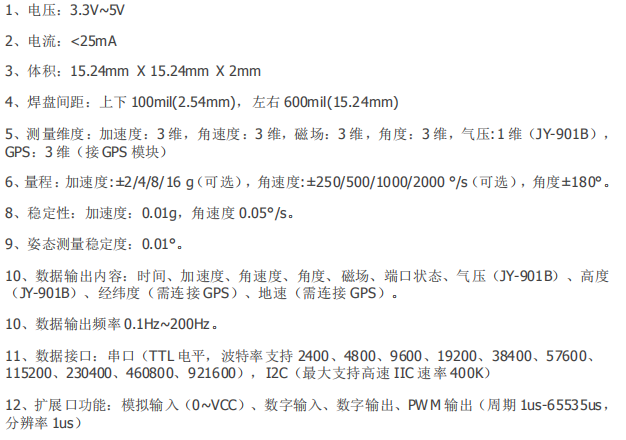
3.4.2 九轴姿态角度传感器性能
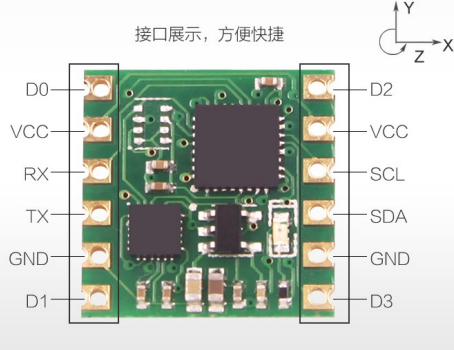
3.4.3 实物图
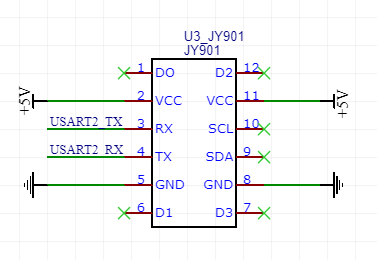
3.4.4 引脚说明
3.4.5 通信方式
3.5 电机驱动编码器部分
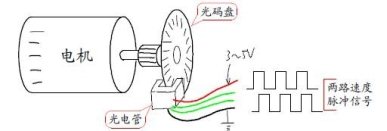
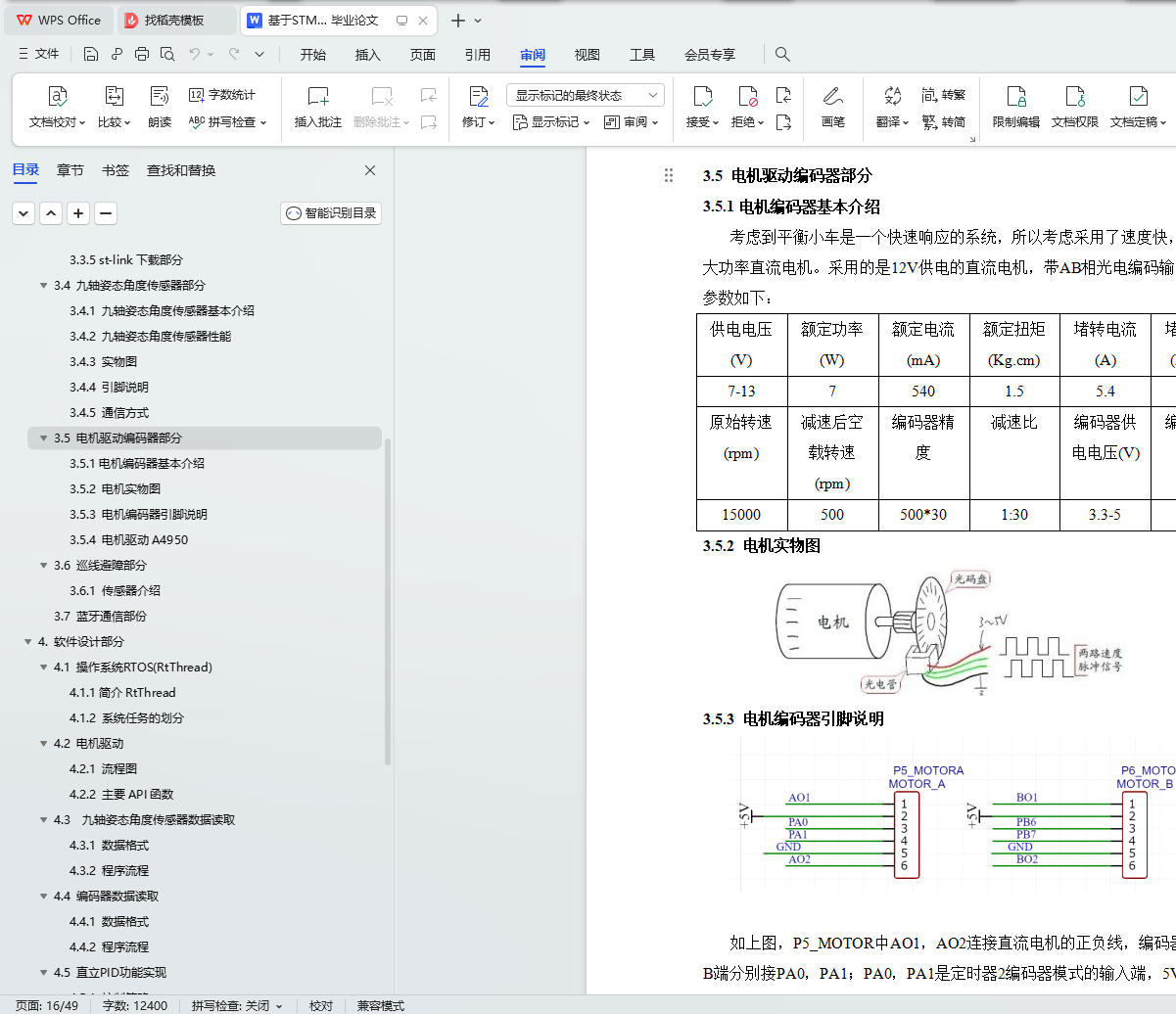
3.5.1电机编码器基本介绍
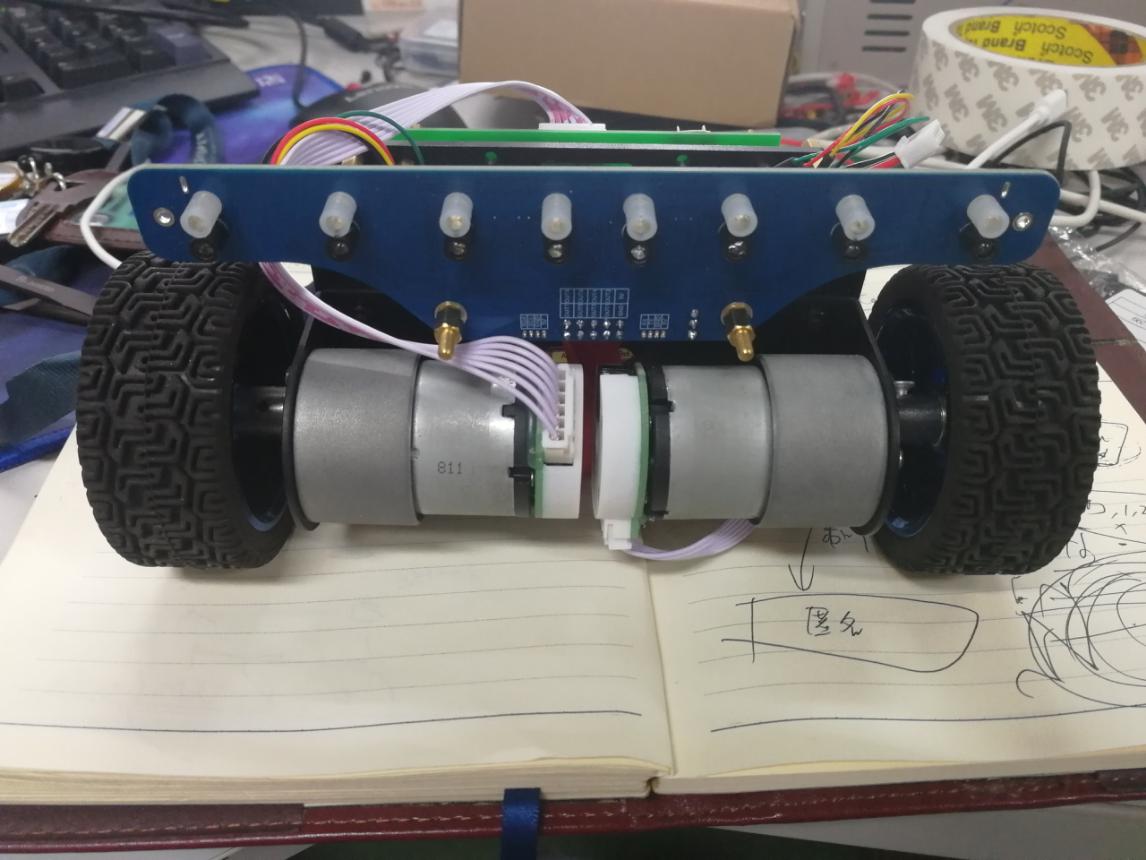
3.5.2 电机实物图
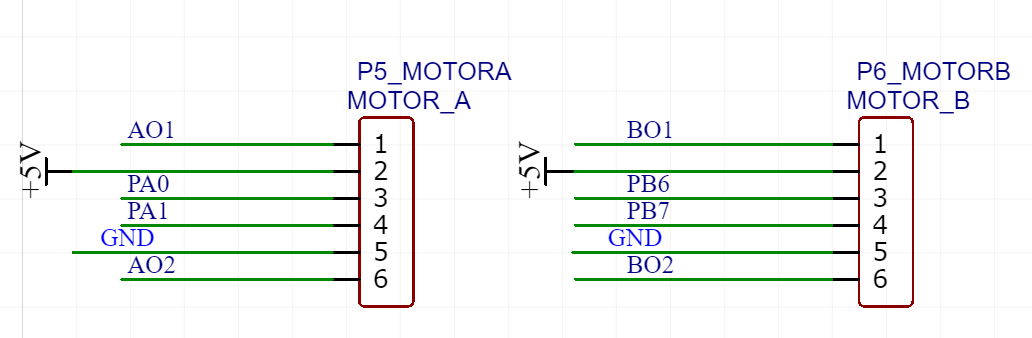
3.5.3 电机编码器引脚说明
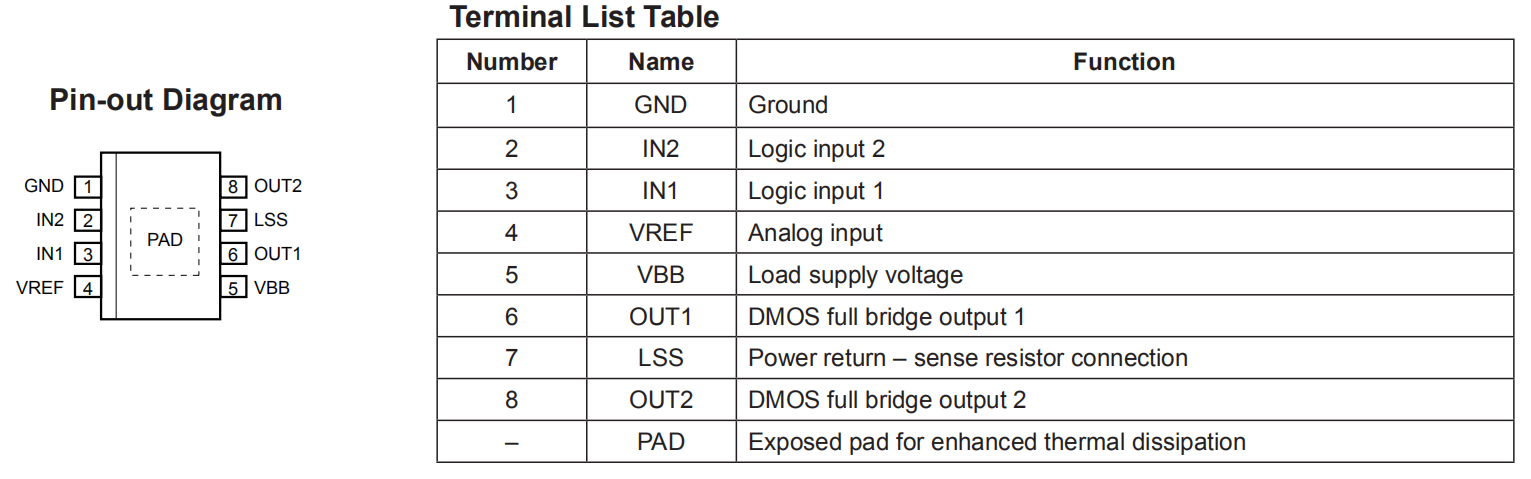
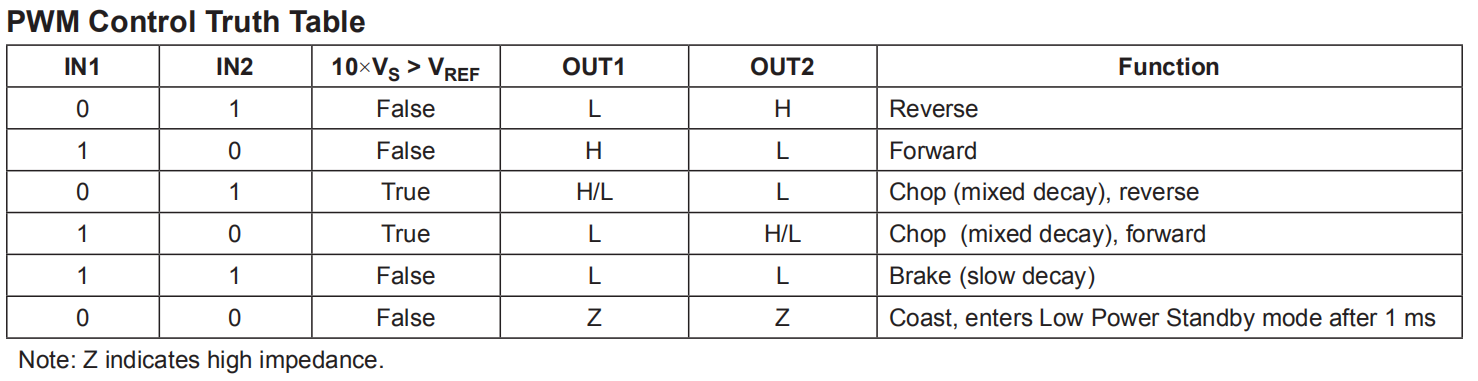
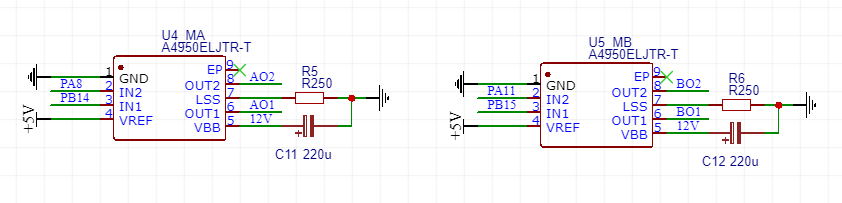
3.5.4 电机驱动A4950
3.6 巡线避障部分
3.6.1 传感器介绍
3.7 蓝牙通信部份
4. 软件设计部分
4.1 操作系统RTOS(RtThread)
4.1.1简介RtThread
4.1.2 系统任务的划分
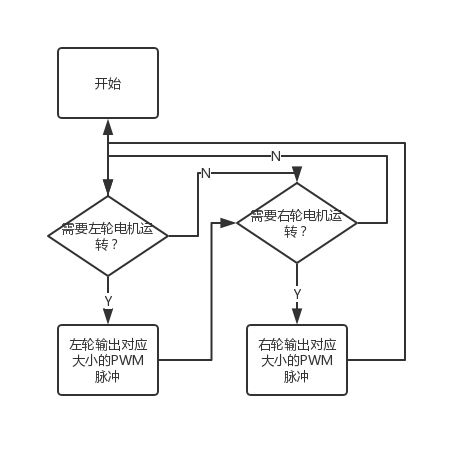
4.2 电机驱动
4.2.1 流程图
4.2.2 主要API函数
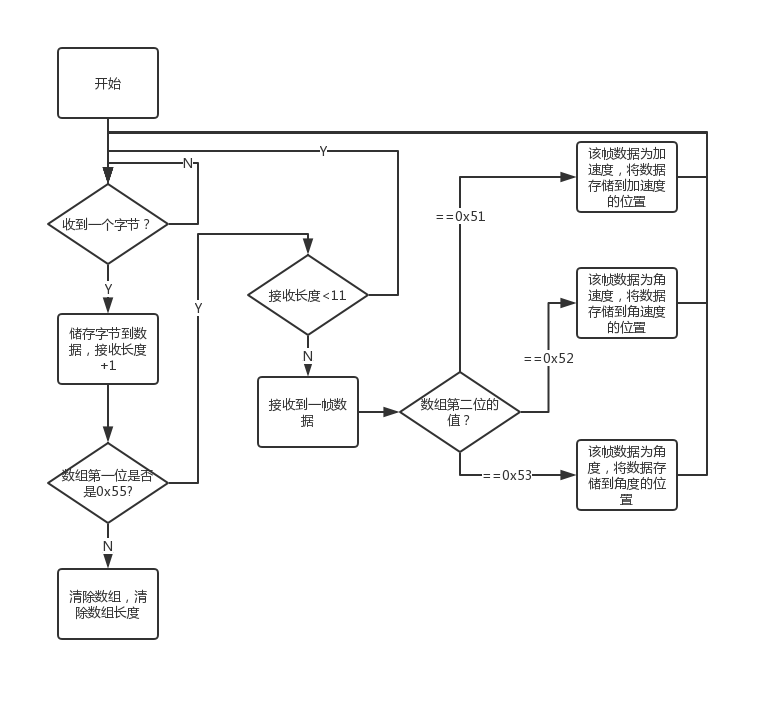
4.3 九轴姿态角度传感器数据读取
4.3.1 数据格式
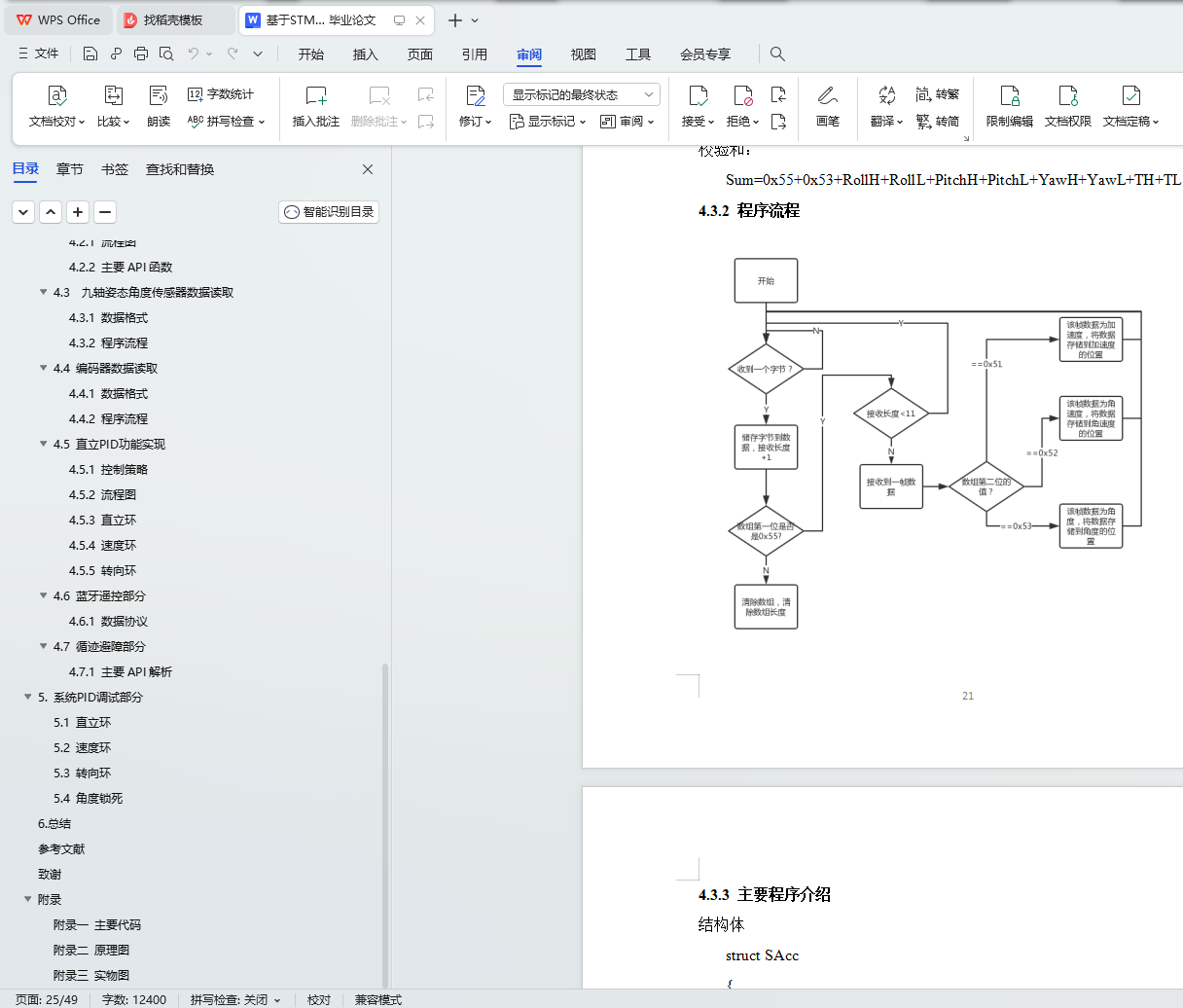
4.3.2 程序流程
4.4 编码器数据读取
4.4.1 数据格式
4.4.2 程序流程
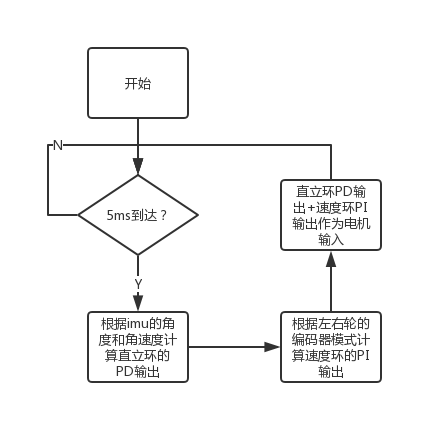
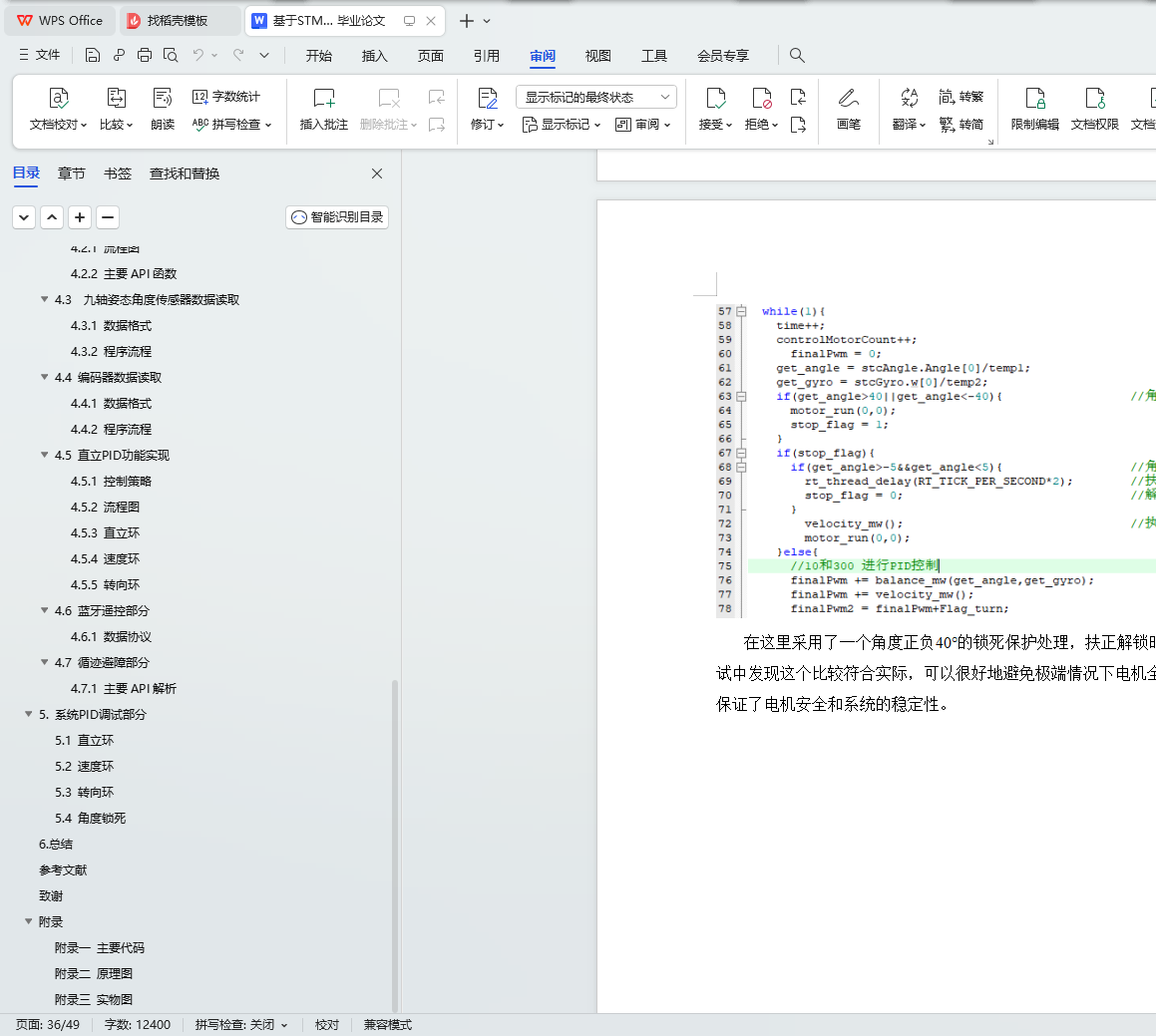
4.5 直立PID功能实现
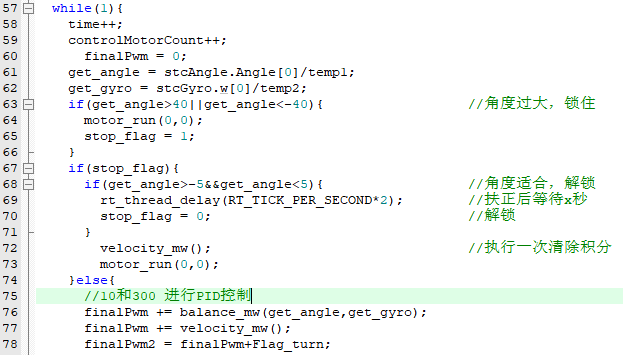
4.5.1 控制策略
4.5.2 流程图
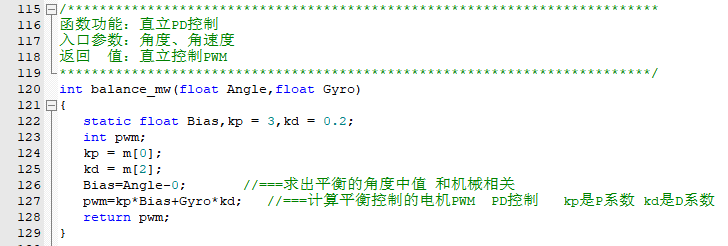
4.5.3 直立环
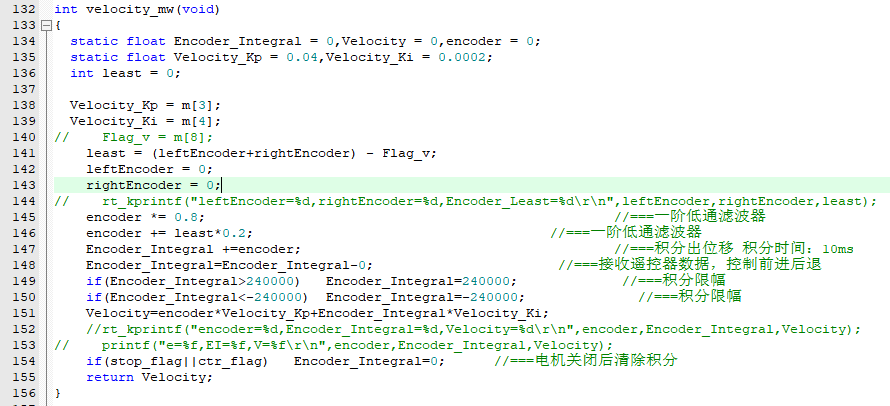
4.5.4 速度环
4.5.5 转向环
4.6 蓝牙遥控部分
4.6.1 数据协议
4.7 循迹避障部分
4.7.1 主要API解析
5. 系统PID调试部分
5.1 直立环
5.2 速度环
5.3 转向环
5.4 角度锁死
6. 总结
参考文献
致谢
附录
附录一 主要代码
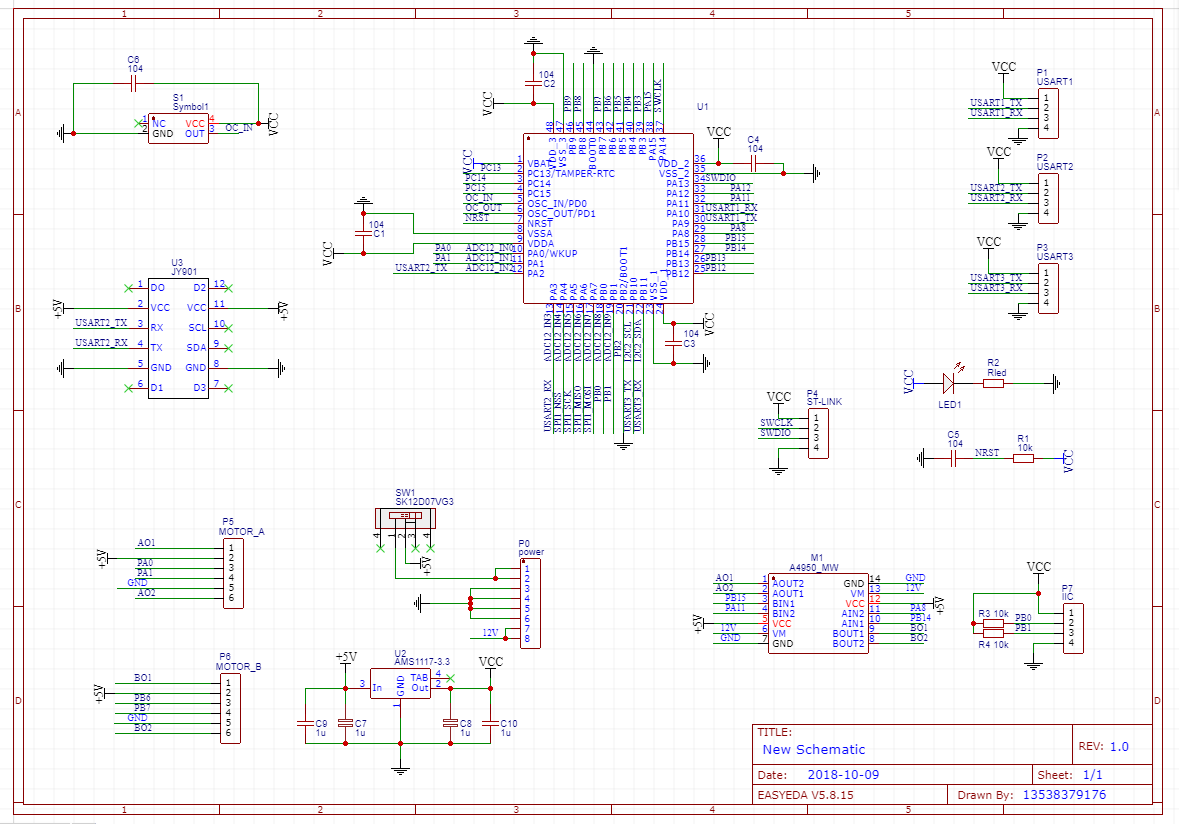
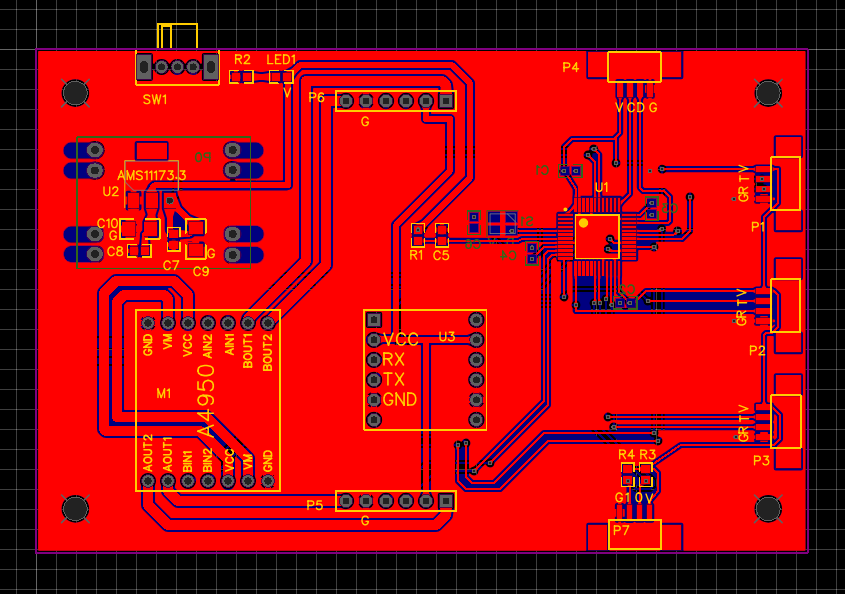
附录二 原理图
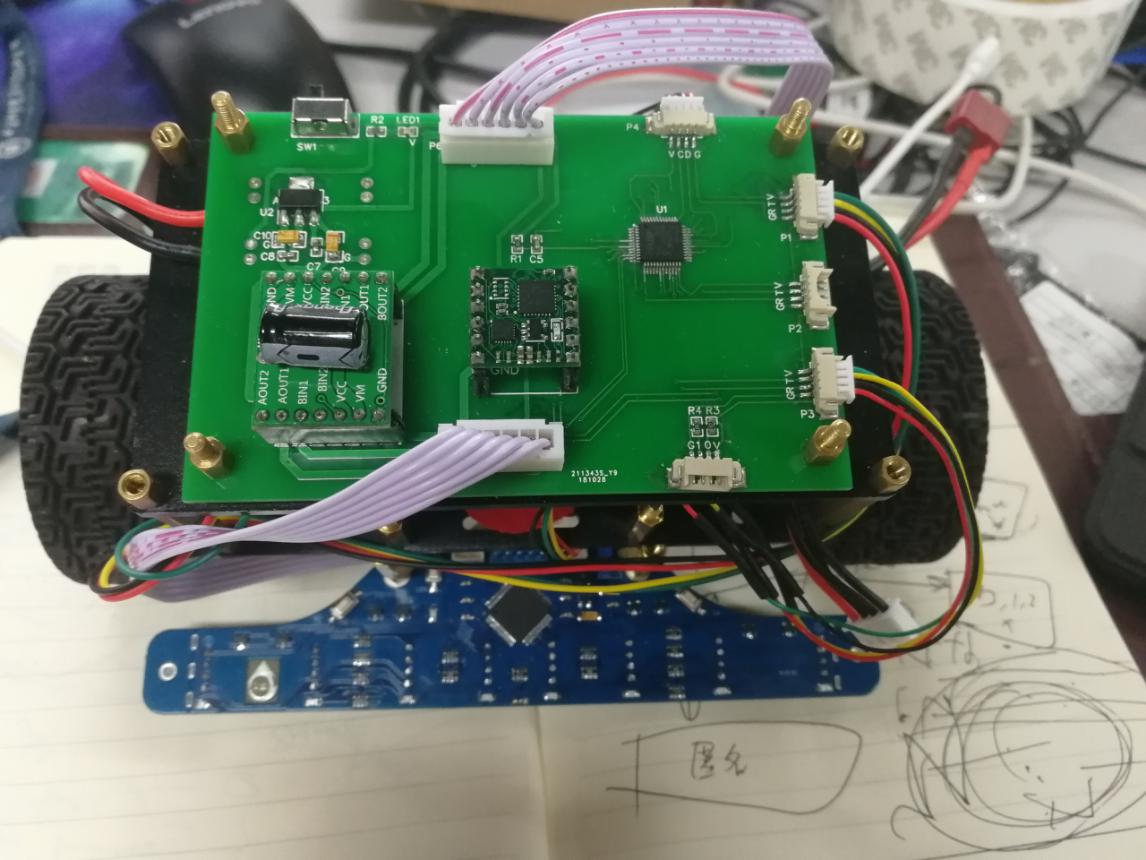
附录三 实物图