目录
论⽂简述
Local features and kernels for classification of texture and object categories: a comprehensive study
原理简述
算法流程
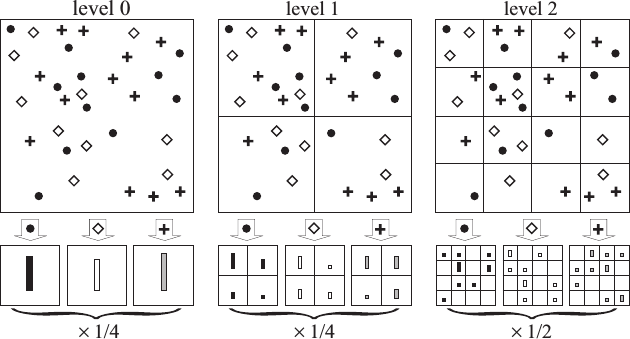
Beyond bags of features: Spatial pyramid matching for recognizing natural scene categories
背景知识
原理简述
算法流程
实现
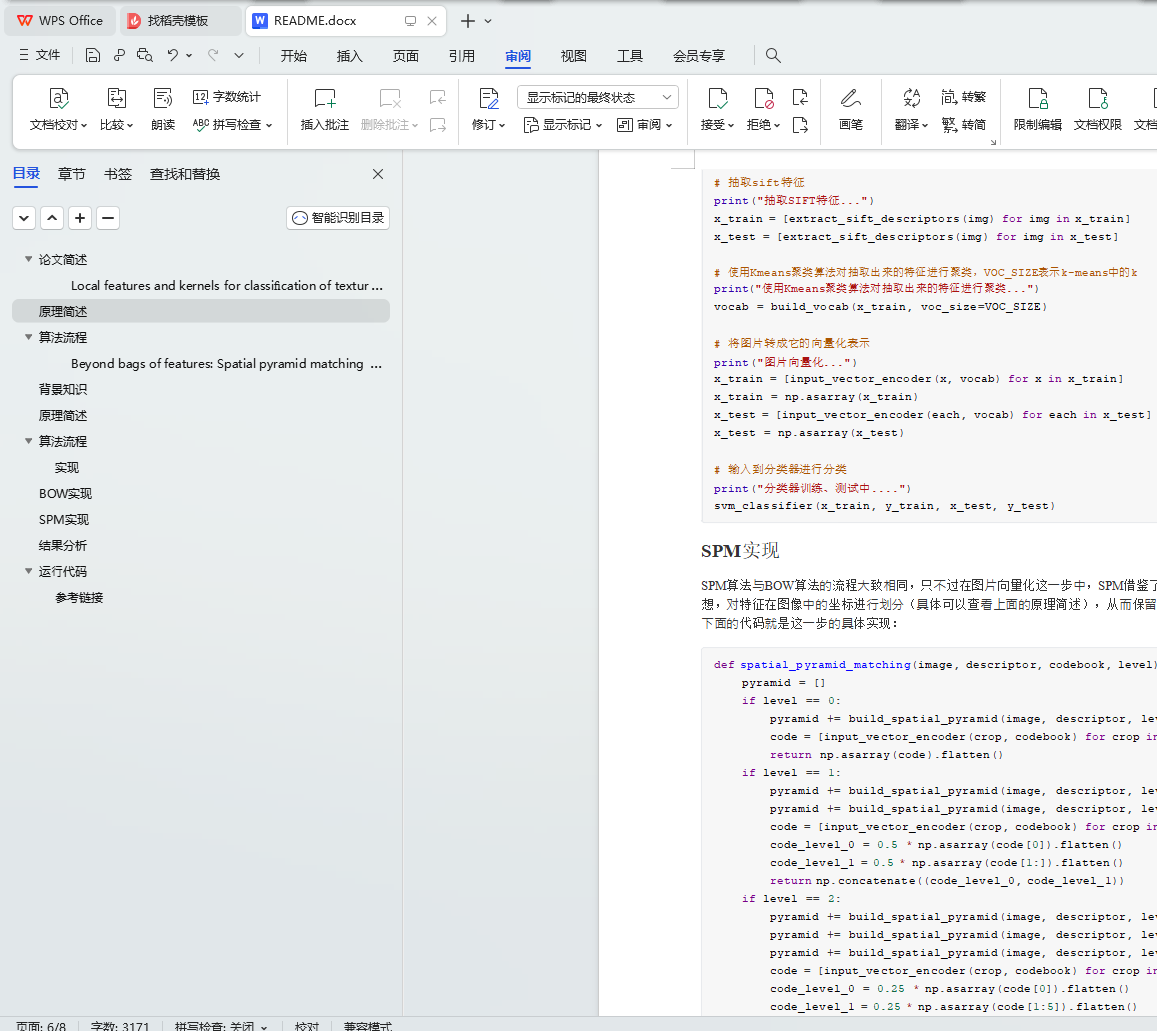
BOW实现
SPM实现
结果分析
运⾏代码
参考链接
论⽂简述

Local features and kernels for classification of texture and object categories: a comprehensive study
原理简述
该论⽂提出了⼀种基于⽀持向量机的物体识别⽅法,并对该⽅法做了⼤量详细⽽全⾯的评估。评估的过 程主要是通过改变以及组合该⽅法的”组件“,包括使⽤多种关键点检测器(keypoint detector,如Harris-Laplace detector 以及 Laplacian detector),不同级别的⼏何不变性(geometric
invariance,如尺度不变性S、尺度旋转不变性SR、仿射不变性A),不同的特征描述符(如SPIN、
RIFT、SIFT),不同的向量机核(如常⽤的线性核、多项式核、RBF核、⽂章提出  核和EMD核)。通过在多个纹理分析以及物体检测的数据集上做分析,论⽂得出的结论是使⽤不同的组件进⾏组合有助 于综合利⽤它们提取的信息,进⽽提⾼分类的效果。同时,论⽂还讨论了背景图案对分类效果的影响, 它们的实验表明使⽤基于局部特征对图⽚进⾏表⽰有助于消除背景图案对识别效果的影响,使得识别⽅ 法鲁棒性更强。
核和EMD核)。通过在多个纹理分析以及物体检测的数据集上做分析,论⽂得出的结论是使⽤不同的组件进⾏组合有助 于综合利⽤它们提取的信息,进⽽提⾼分类的效果。同时,论⽂还讨论了背景图案对分类效果的影响, 它们的实验表明使⽤基于局部特征对图⽚进⾏表⽰有助于消除背景图案对识别效果的影响,使得识别⽅ 法鲁棒性更强。